Уже известны приборы для фотограмметрической обработки аэрофотоснимков, снабженные расположенными над поворотными снимкодержателями каретками, несущими объективы стереоскопа и механически связанными с каретками, расположенными над вычерчиваемым планшетом и имеюш,И(Ми пишущие острия.
Согласно настоящему изобретению, предлагается подобный же прибор для построения триангуляционной сети по аэрофотоснимкам, но отличающийся тем, что, с целью стереоскопического отождествления направлений на снимках без производства наколов, он снабжен тремя сиимкодержателями и соответственно тремя расположенными над снимками объективами, которые могут быть приключены к окулярной части стереоскопа прибора попарно в любой комбинации.
Для осуществления указанного приключения применены соединенные с отражательными призмами механические тяги, которые вторым концом могут быть присоединены в любой Парной комбинации к нижним; поворотным отрицательным призмам окулярной части стереоскопа.
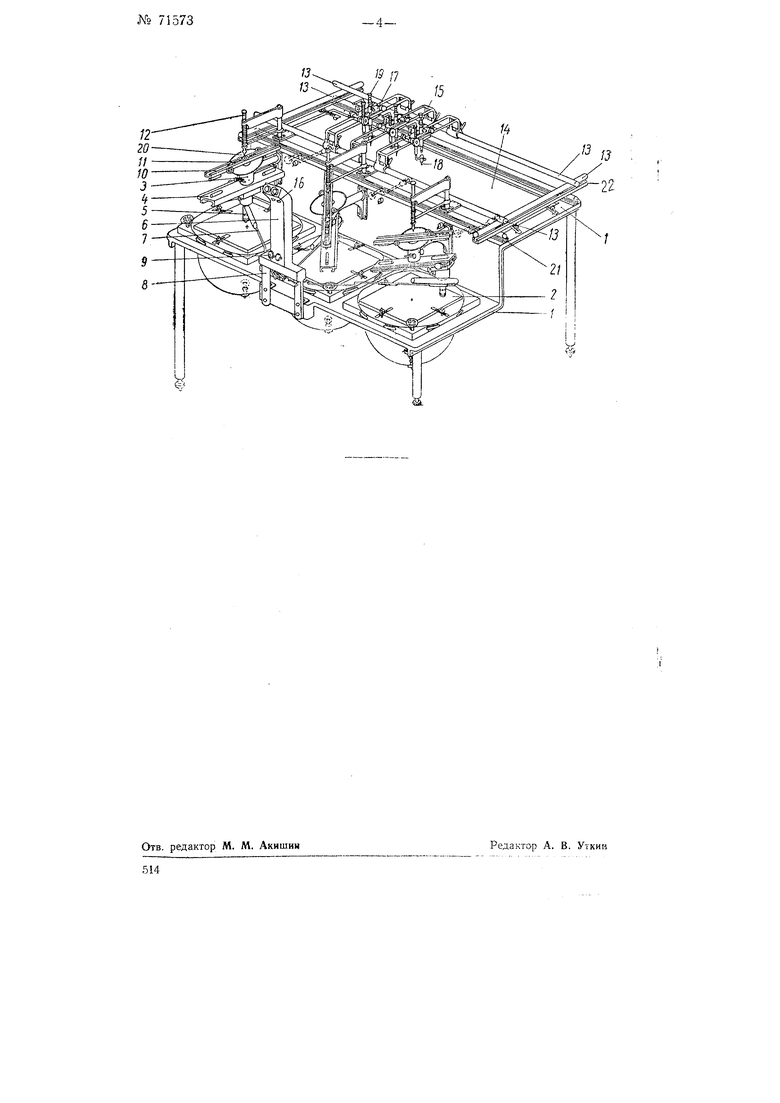
Hai чертеже представлена конструкция предлагаемого прибора.
На станине / прибора устанавливают в кассетах 2 три аэрофотоснимка, которые при наблюдении ориентируют путем вращения кассет так, чтобы единичные начальные направления были параллельны друг другу, а все другие направления были при этом параллельны их положению в сети фототриангуляции. Над центрами вращения кассет центрируют оси 3, которые могут вращаться в неподвижных втулках вместе с прикрепленными к ним1 параллельными направляющими линейками 4 и 10. Нижняя линейка 4 служит направляющей для движения объектива 5 с маркой, поэтому при наблюдении точки снимка обе линейки 4 к 10 осуществляют линии триангуляционной сети на снимке. Перенесение этих линий на сеть фототриангуляции, которая строится на столе 14, политом эмульсией и располагаемом на верхнем столе станины 1, осуществляют для каждого снимка при помощи ползушки //, скользящей по верхней направляющей линейке 10, которая соединена . штифтом 13 с иглой 18, прочерчивающей на стекле линии сети. Штифты 12 жестко скреплены с рамой 13, на которой установлены мостики 15, несущие иглы /S. Рама 13 вместе с мостиками 15, увле511
каемая ползушкой // за штифт 12, может свободно двигаться в любых направлениях по системе взаимно перпендикулярных рельсов 21 и 22. Каждый из штифтов 12 соединяется с ;соответствующей, ползушкой // лишь ,прИ: прочерчивании направления данного снимка. Центрирование наблюдаемого по снимку пучка лучей на точке сети осуществляют передвижением мостика 15 и его каретки 17, несущей иглу 18. Фиксирование этой центрировки производят при помощи микроскопа J9. Объективы 5, перемещающиеся вдоль линейки 4 на.ползушке, могут вращаться вокруг своей вертикальной оси, направляя постоянно параллельный пучок лучей от наблюдаемой точки, совмещенной с маркой, на принимающую нижнюю отражательную призму бинокуляра 6 при помощи механической тяги 7. Эта тяга также поворачивает соответственно расположенные за объективом 5 отражательные, пркз-мы.
В объективе изображение снимка фокусируется на марку, устананленную на главном фокусном расстоянии от второго объектива, проектирующего изображение наблюдаемой точки, совмещенное с маркой, в бинокуляр параллельным лучком. В бинокуляре лучи фокусируются, и точки рассматриваются в окуляры. Для требуемых поворотов изображений в параллельном ходе лучей установлены призмы, вращаемые штурвалами 9. Для уравнивания величины поля зрения окуляров установлены диафрагмы 16. Последовательное наблюдение смежных стереопар ромба сети при наблюдении тройной точки, не накалываемой на сниМКах, а также обработка последующих снимков сети, вставляемых вместо отработанных, вызывает необходимость наблюдения любой пары из трех расположенных снимков, что осуществляется путем переключения луча зрения от любого объектива в любой из окуляров бинокуляра.
Переключение луча зрения выполняют вставкой соответствующей тяги 7 в соответствующую трубку 8
нижней отражательной призмы бинокуляра,
К прибору прилагаются юстировочные линейки, подобные направляющим линейкам.
Для возможности ориентирования снимков по параллельным начальным направлениям установлены лимбы 20, позволяющие производить отсчеты углов, составляемых начальными направлениями с осью прибора.
Рабочий процесс осуществляется следующим образом.
На снимках накалываются главные точки (или условные точки надира) без переколки их на смежные снимки и общие точки со смежными маршрутами - точки трансформирования и опознавательные знаки, которые не оказывают влияния на накопление ошибок в сети. Тройные (ориентировочные) точки не накалываются и отождествляются стереоскопически при построении сети на приборе. Ориентирование (отождествление начальных направлений) производится стереоскопически.
Ориентирование, наблюдение и засечку точек первой стереопары (исключая тройные точки) производят обычным путем. Первые два мостика 15 устанавливают над центрами снимков сети при выборе базиса. Затем производят подориентирование третьего снимка при неподвижном втором снимке и заданном положении начального направления второго снимка, переключив луч зрения с первого на третий снимок. Для этого, действуя методом последовательных приближений, наводят стереоскопически марку на пентр (главную точку) третьего снимка движением направляющих линеек и объективов. Сняв отсчет по лимбу направления направляющих линеек второго снимка, устанавливают направляющие линейки третьего снимка параллельно линейкам второго снимка, с учетом мест нулей на лимбе третьего снимка. При неподвижных линейках движением ползз шек объективов и вращением третьего снимка наводят стереоскопически марку на центр второго снимка.
Аналогично выполняют второе приближение. Стереоскопические наведения марки выполняют при повернутых призмами изображениях так, чтобы движение марки соответствовало изменению видимого продольного параллакса (движению мар|Ки по глубине). Послеподориентирования третьего (также четвертого ;i т. д.) снимка, переключив соответственно лучи зрения, производят стереонаведение марки на тройную точку ромба сети (сначала одну, после нее другую) сначала в первой стереопаре ромба сети, затем сразу же, сохраняя неподвижно марку среднего снимка, во второй стереопаре, переключив луч зрения. Тройные точки выбирают при наведении марки. Произведя таким образом стереоотождествление точки, проводят сразу же последовательно все три направления этой точки трех снимков. Причем первые два направления проводят иглами первых двух мостиков 15 из центров первых двух снимков сети, получая положение тройной точки, а третий мостик устанавливают над этим полученным положением точки, и при проведении третьего направления определяют засечкой на начальном направлении третьего снимка центр последнего. После этого аналогично наблюдают вторую тройную точку poMi6a сети, которая дает третьей засечкой второе положение центра третьего снимка на его начальном направлении. За окончательное значение центра третьего снимка принимают среднее положение (на начальном направлении), над которым н устанавливают окончательно третий мостик. Затем производят наблюдение и засечку точек второй стереопары. Далее, заменив первый снимок НОВЫМ четвертым, продолжают работу аналогичным путем с соответственным переключением лу. чей зрения.
Предмет изобретения
1.Прибор для построения триангуляционной сети по аэрофотосни мкам, в котором расположенные над поворотными снимкодержателями каретки, несущие объективы стереоскопа, механически связаны с каретками, расположенными над вычерчиваемым планшетом и несущими пишущие острия, отличающийс я тем, что, с целью производства стереоскслического отождествления направлений на снимках без производства наколов, прибор снабжен тремя снимкодержателями и соответственно тремя расположенными над снимками объективами 5, могущими быть попарно в любой комбинации приключенными к окуляр(ПоЗ части стереоскопа прибора.
2.Форма выполнения прибора по п. 1, отличающаяся тем, что для осуществления приключения объективов 5 к окулярной части стереоскопа прибора. пр -:;менены соединенные с отражательным. призмам, расположелными за объективами 5 и поворотными вокруг осей последних, м.еханические тяги 7, вторым своим концом могущие быть присоединенными в любой парной комбинации к нижним поворотным отражательным призмам окулярной части стереоскопа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стереоскоп измерительный | 1973 |
|
SU718823A1 |
| Стереофотограмметрический прибор | 1981 |
|
SU991168A1 |
| УНИВЕРСАЛЬНЫЙ СТЕРЕОФОТОГРАМ.МЕТРИЧЕСКИЙ ПРИБОР АНАЛИТИЧЕСКОГО ТИПА | 1969 |
|
SU250471A1 |
| Стереоскоп | 1980 |
|
SU991169A1 |
| ОПТИЧЕСКАЯ ПАНОРАМИЧЕСКАЯ СИСТЕМА | 2009 |
|
RU2399073C1 |
| Стереокомпаратор | 1979 |
|
SU815500A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОРОГА СТЕРЕОСКОПИЧЕСКОГО ЗРЕНИЯ | 1995 |
|
RU2110206C1 |
| Стереоприбор для обработки аэроснимков | 1949 |
|
SU89427A1 |
| Топографический проектор | 1960 |
|
SU135238A1 |
| Фотограмметрический прибор | 1982 |
|
SU1064134A1 |
33 Свод. Выпуск 12, 1949 г.
513
