(54) СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения гранулометрического состава породы | 1973 |
|
SU481767A1 |
| СТЕРЕОКОМПАРАТОР | 1971 |
|
SU302602A1 |
| СТЕРЕОАВТОГРАФ | 1971 |
|
SU309241A1 |
| ПРИСТАВКА К СТЕРЕОФОТОГРАММЕТРИЧЕСКИЛ\ ПРИБОРАМ, СНАБЖЕННЫМ ПАРАЛЛАКТИЧЕСКИМ БИНТОМ | 1966 |
|
SU179016A1 |
| Монокомпаратор | 1982 |
|
SU1057783A1 |
| ОРТОТРАНСФОРМАТОР | 1970 |
|
SU284324A1 |
| Измерительный стереоскоп | 1960 |
|
SU131920A1 |
| ВЫСОКОТОЧНЫЙ СТЕРЕОКОМПАРАТОРbi:i>& | 1967 |
|
SU190592A1 |
| Стереопреобразователь | 1955 |
|
SU110486A1 |
| Конвергентное устройство | 1956 |
|
SU115995A1 |
Изобретение относится к разделу фотогралнлетрии, точнее к приборам типа стереокомпаратора, и предназначено преимущественно для измерения цилиндрических рентгеновских снимков, например, рентгеновской стереопары трубопровода, с целью выявления и определения местоположения дефектов в стенке трубопровода.
Известен стереофотограмметрический прибор - интерпретоскоп, предназначенный для стереоскопического рассматривания, дешифрирования снимков и измерения разностей продольных параллаксов, состоящий из стола с прозрачным стеклянным экраном, на который помещаются снимки. Над столом закреплен бинокулярный микроскоп, имеющий две части - подвижную и неподвьжную. Подвижная перемещается по двум взаимно перпендикулярным направлениям, что позволяет рассматривать различные части стереопары. Увеличение бинокулярного микроскопа можно изменять с помощью панкратической системы и двух взаимнозаменяемых объективов с различными фокусными расстояниями. Наведение марки бинокуляра на точку стереомодели производится четырьмя движениями подвижной части наблюдательной системы: совместными движениями левого и правого объективов в про дольном и поперечном направлениях и движения одного объектива относительно другого в тех же направлениях. Перемещение одного объектива относительно другого в продольном направлении можно отсчитывать по
10 шкале продольных параллаксов tl .
Недостатком интерпретоскопа является то, что он не имеет устройства для автоматического определе- ния высот точек отснятого объекта.
15
Наиболее близким к предлагаемому является стереофотограмметрический прибор для измерения рентгеновских снимков, содержгиций станину с неподвижной бинокулярной наблюдатель20ной системой, снабженной измери.тельной маркой. На станине закреплены направляющие, по которым с помощью штурвала может перемещаться продольная каретка вдоль оси X прибора. На
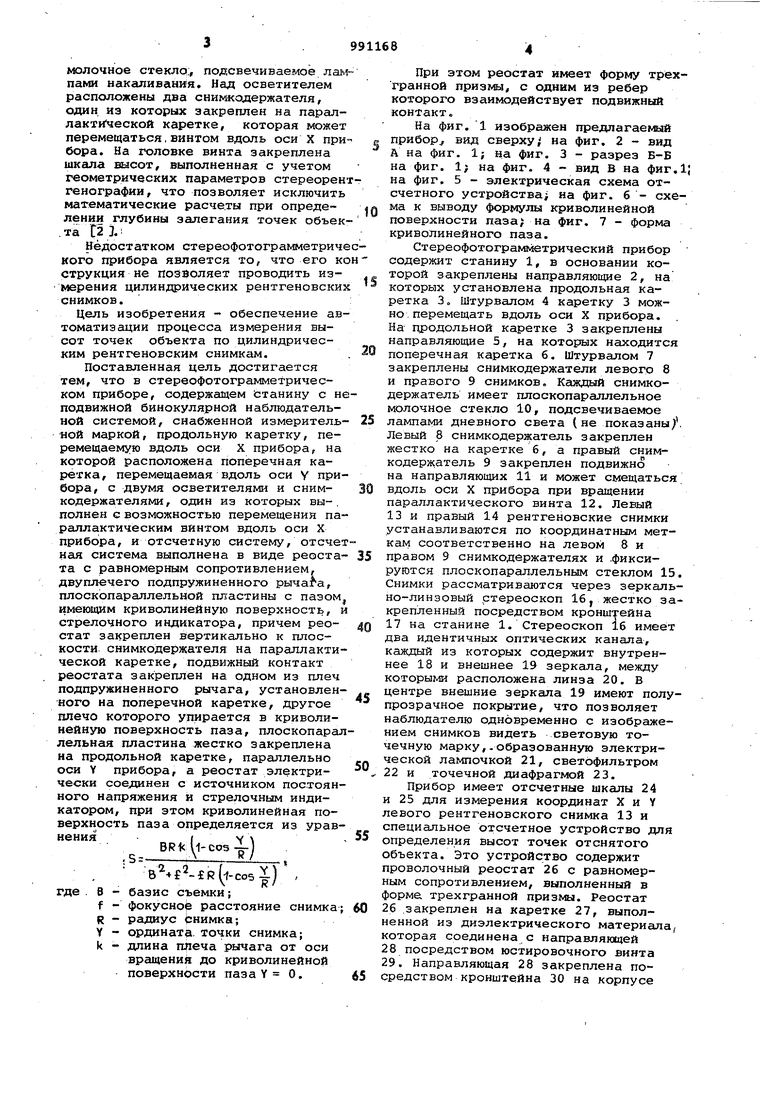
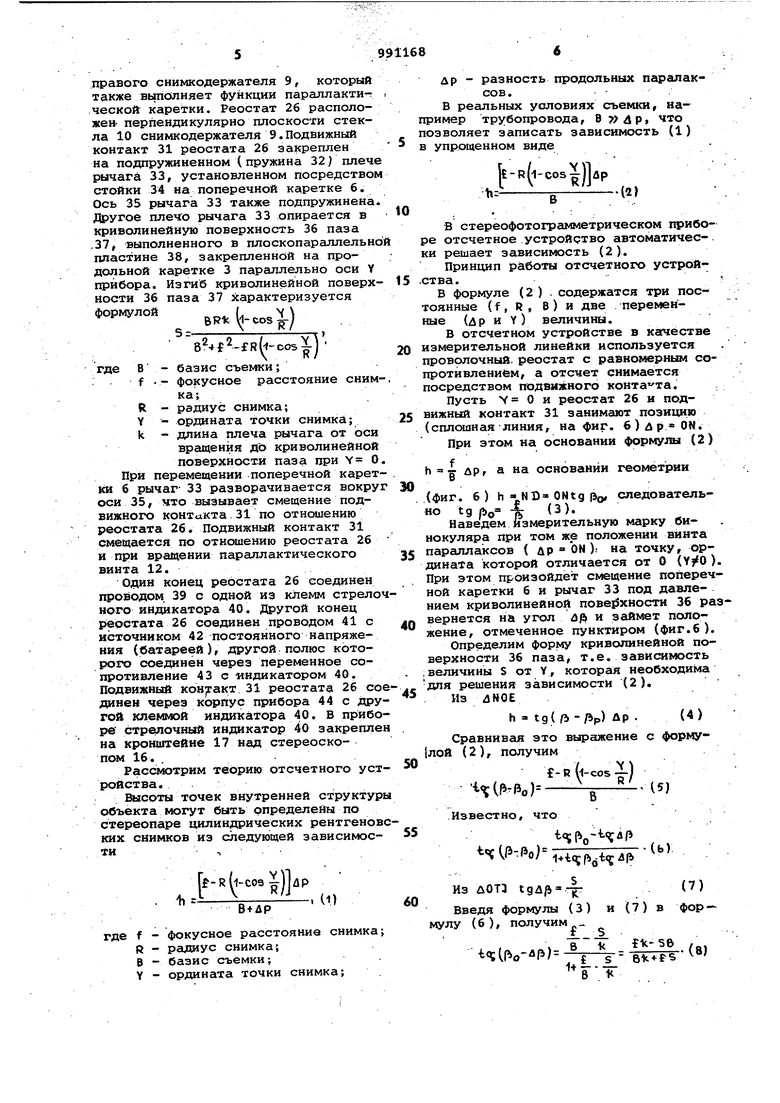
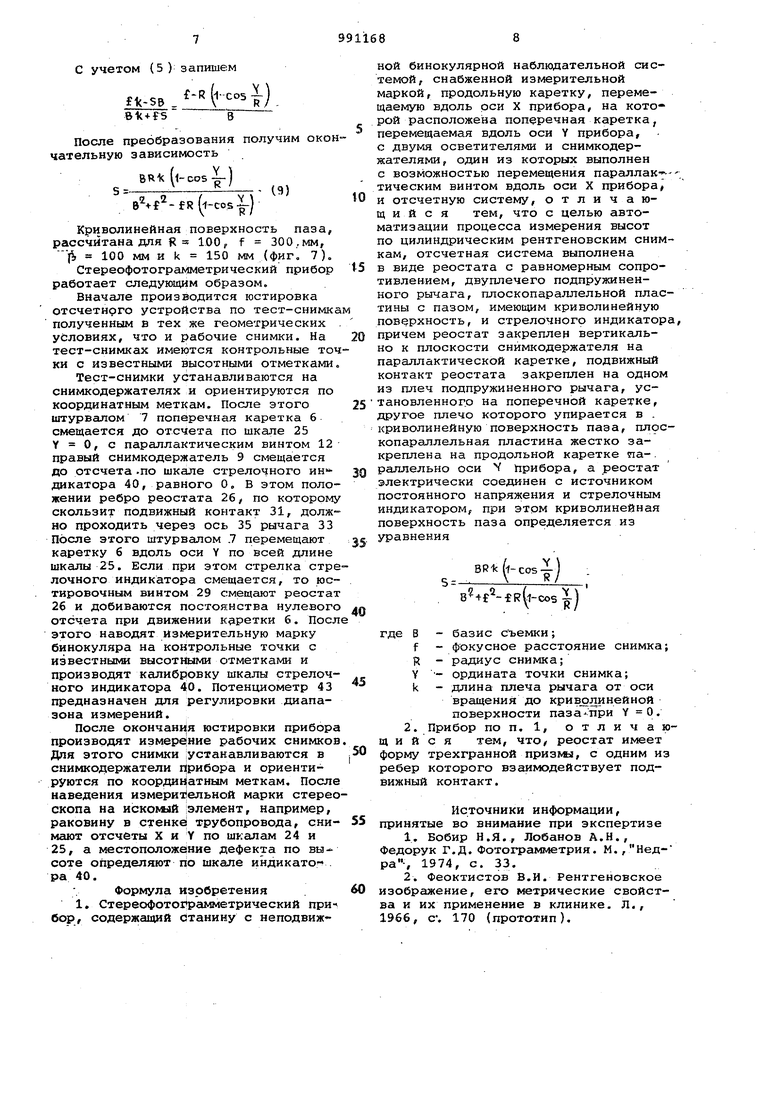
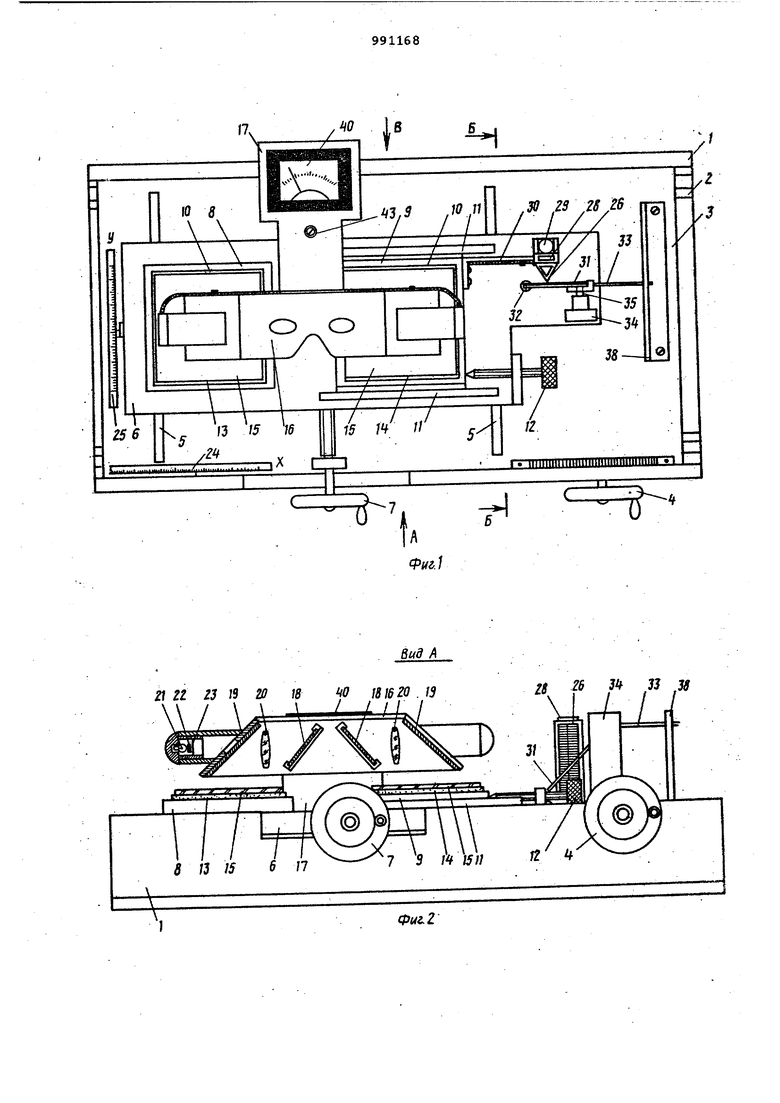
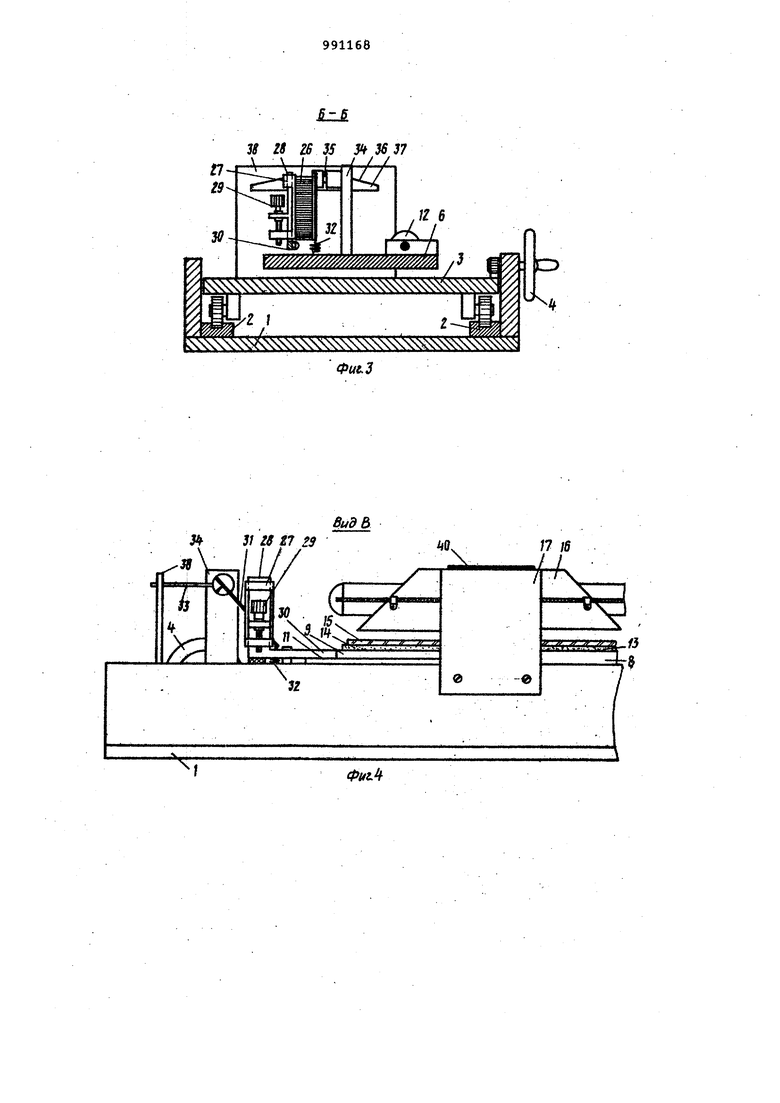
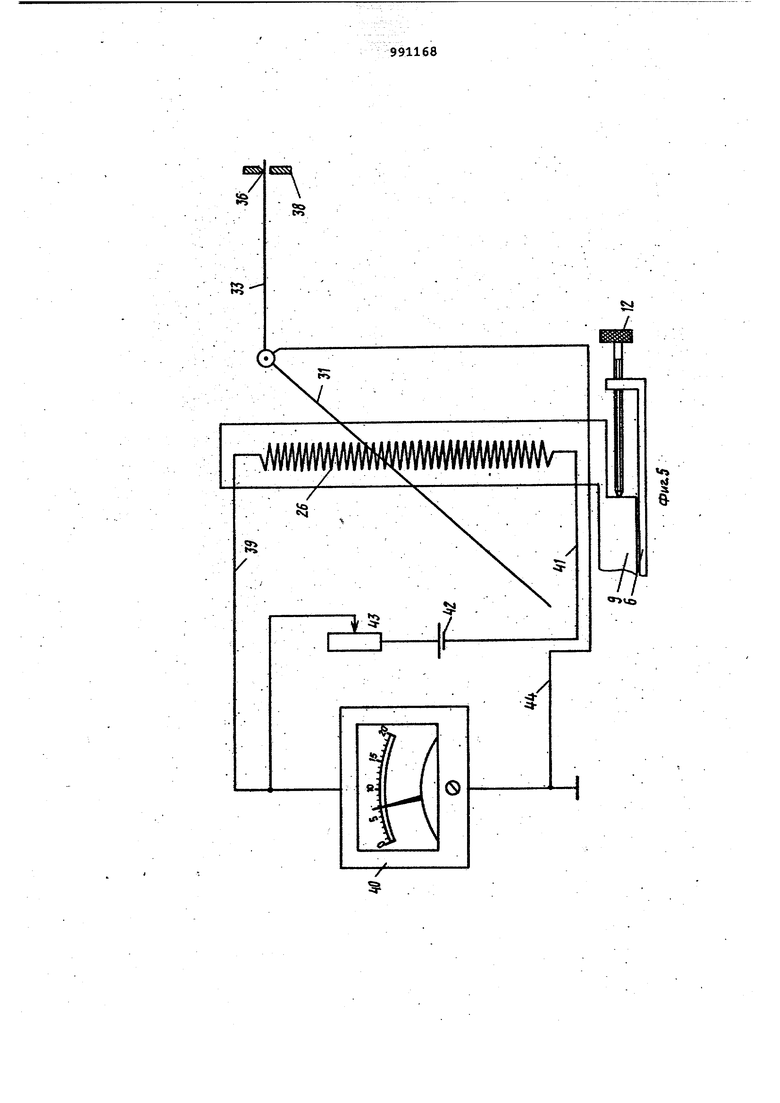
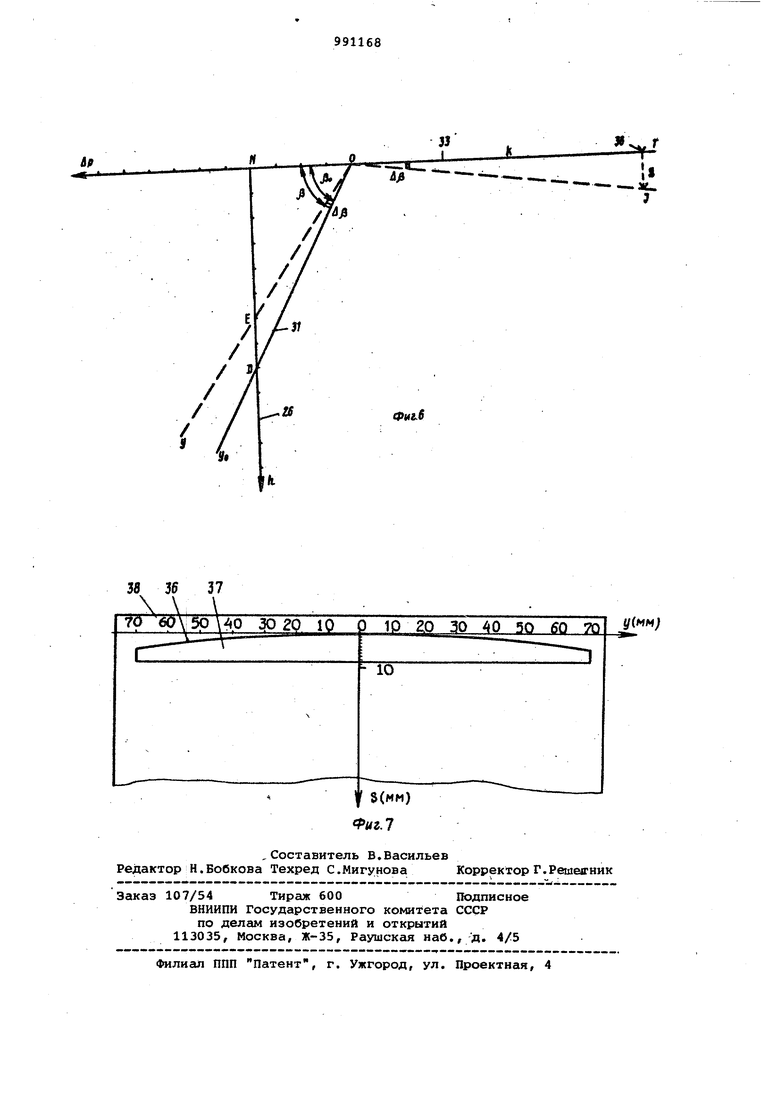
25 продольной каретке установлена поперечная каретка, которая с помощью штурвала может перемещаться вдоль оси Y прибора. На поперечной каретке установлен осветитель типа негато30скопа, содержащий, плоскопараллельное молочное стекло., подсвечиваемое лам пами накаливания. Нал осветителем расположены два снимкодержателя, один из которых закреплен на параллакти еской каретке, которая может перемещаться,винтом вдоль оси X при бора. На головке винта закреплена шкала высот, выполненная с учетом геометрических параметров стереорен генографии, что позволяет исключить математические расчеты при определении глубины залегания точек объек . та 2 3. Недостатком стереофотограмметрич кого прибора является то, что его к струкция не позволяет проводить измерения цилиндрических рентгеновски снимков. Цель изобретения - обеспечение ав томатизации процесса измерения высот точек объекта по цилиндрическим рентгеновским снимкам, Поставленная цель достигается тем, что в стереофотограмметрическом приборе, содержащем йтанину с н подвижной бинокулярной наблюдательной системой, снабженной измеритель ной маркой, продольную каретку, перемещаемую вдоль оси X прибора, на которой расположена поперечная каретка, перемещаемая вдоль оси Y при бора, с двумя осветителями и снимкодержателями, один из которых вы-. полнен с возможностью перемещения па раллактическим винтом вдоль оси X прибора, и отсчетную систему, отсче Иая система выполнена в виде реоста та с равномерным сопротивлением, двуплечего подпружиненного рычага, плоскопараллельной пластины с пазом имеющим криволинейную поверхность, стрелочного индикатора, причем реостат закреплен вертикально к плоскости снимкодержателя на параллакти ческой каретке, ПОДВИЖНЕЛЙ контакт реостата закреплен на одном из плеч подпружиненного рычага, установлен ного на поперечной каретке, другое плечо которого упирается в криволинейную поверхность паза, плоскопарал лельная пластина жестко закреплена на продольной каретке, параллельно оси Y прибора, а реостат электрически соединен с источником постоянного напряжения и стрелочным индикатором, при этом криволинейная поверхность паза определяется из уравненияBR1(1-cos j (-f-co5|-) В где . В - базис съемки; f - фокусно расстояние снимка R - радиус снимка; Y - ордината точки снимка; k - длина плеча рычага от оси вращения до криволинейной поверхности паза У 0. При этом реостат имеет форму трёхгранной призмы, с одним из ребер которого взаимодействует подвижный контакт. На фиг. 1 изображен предлагаемой прибор вид сверху, на фиг, 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - вид В на фиг,1| на фиг. 5 - электрическая схема отсчетного устройства; на фиг. 6 - схема к выводу формулы криволинейной поверхности паза; на фиг. 7 - форма криволинейного паза. Стереофотограмметрический прибор содержит станину 1, в основании которой закреплены направляющие 2, на которых установлена продольная каретка 3. Штурвалом 4 каретку 3 можно перемещать вдоль оси X прибора. На цродольной каретке 3 закреплены направляющие 5, на которых находится поперечная каретка б. Штурвалом 7 закреплены снимкодержатели левого 8 и правого 9 снимков. Каждый снимкодержатель имеет плоскопараллельное молочное стекло 10, подсвечиваемое лампами дневного света (не показаны/, Левый 8 снимкодержатель закреплен жестко на каретке б, а правый снимкодержатель 9 закреплен подвижнсэ на направляющих 11 и может смещаться вдоль оси X прибора при вращении параллактического винта 12. Левый 13 и правый 14 рентгеновские снимки устанавливаются по координатным меткам соответственно на левом 8 и правом 9 снимкодержателях и .фиксируются плоскопараллельным стеклом 15. Снимки рассматриваются через зеркгшьно-линзовый .стереоскоп 16, жестко закрепленны.й посредством кронштейна 17 на станине 1. Стереоскоп 16 имеет два идентичных оптических канала, каждый из которых содержит внутреннее 18 и внешнее 19 зеркала, между которыми расположена линза 20. В центре внешние зеркала 19 имеют полупрозрачное покрытие, что позволяет наблюдателю одновременно с изображением снимков видеть световую точечную марку,-образованную электрической лампочкой 21, светофильтром 22 и точечной диафрагмой 23. Прибор имеет отсчетные шкалы 24 и 25 для измерения координат X и У левого рентгеновского снимка 13 и специальное отсчетное устройство для определения высот точек отснятого объекта. Это устройство содержит проволочный реостат 26 с равномерным сопротивлением, выполненный в форме трехгранной призмы. Реостат 26 закреплен на каретке 27, выполненной иэ диэлектрического материала, которая соединена с направляющей 28 посредством юстировочного винта 29. Направляющая 28 закреплена посредством кронштейна 30 на корпусе правого снимкодержателя 9, который также вьтолняет функции параллакти ческой каретки. Реостат 26 расположен- перпендикулярно плоскости стекла 10 снимкодержателя 9.Подвижный контакт 31 реостата 26 закреплен на подпружиненном (пружина 32) плеч рычага 33, установленном посредством стойки 34 на поперечной каретке 6, Ось 35 рычага 33 также подпружинена Другое плечо рычага 33 опирается в криволинейную поверхность 36 паза .37, выполненного в плоскопараллельн пластине 38, закрепленной на продольной каретке 3 параллельно оси Y прибора. Изгиб криволинейной поверх ности 36 паза 37 характеризуется формулой / V BRV -cosJ-/ b°4) B 4f2-fR где В - базис съемки; : f .- фокусное расстояние сним Я - радиус снимка; Y - ордината точки снимка; k - длина плеча рычага от оси вращения до криволинейной поверхности паза при Y 0 При перемшцении поперечной карет ки 6 рычаг- 33 разворачивается вокру оси 35, что вызывает смещение подвижного контакта 31 по отношению реостата 26, Подвижный контакт 31 смещается по отношению реостата 26 и при вращении параллактического винта 12. Один конец реостата 26 соединен проводом. 39 с одной из клемм стрело ного индикатора 40. Другой конец реостата 26 соединен проводом 41 с источником 42 постоянного напряжения (ватёфеей), другой;полюс которого соединён через переменное сопротивление 43 с индикатором 40. Подвижный контракт 31 реостата 26 со динеы через корпус прибора 44 с Jopy гой клеммой индикатора 40. В прибо ре стре лочный индикатор 40 закрепле на кронштейне 17 над стереоскопсш 16. . Рассмотрим теорию отсчетного уст ройства. Высоты точек внутренней структур объекта быть определены по стереопаре цилиндрических рентгенов ких снимков из следук)щей зависимоети, (l-co9)ldp . V.P фокусное расстояние снимка; радиус снимка; базис съемки; ордината точки снимка; др - разность продольных п алаксов. - . в реальных условиях съемки, наример трубопровода, . что озволяет записать зависимость (1) в упрощенном виде -R(l-co5)flp .-hr;-.(2) В стереофотограмметрическом приборе отсчетное устройство автоматичес-. ки решает зависимость (2). Принцип работы отсчетиозх) устройства. В формуле (2 ) . содержатся три постоянные {f, R, В ) и две переменные (др и Y) величины. В отсчетном устройстве в касчестве измерительной линейки используется проволочный, реостат с равнсжерным сопротивлением, а отсчет снимается посредством подвижного контакта. Пусть V О и реостат 26 и подвижный контакт 31 занимают позицию (сплошная линия, на фиг. 6 ) лр ОН. При этом на основании формулы (2) а на основании геометрии (фиг. 6) h ND ONtg (,, следовательно tg АО -t (3). Наведем измерительную марку бинокуляра при том же положении винта параллаксов { up-ON); иа точку, ордината которой отличается от О (). При этом произойдет сьющение поперечной каретки 6 и рычаг 33 под давлением криволинейной пове1 хности 36 развернется на угол dft и займет положение, отмеченное пунктиром (фиг.6 ). Определим форму криволинейной поверхности 36 паза, т.е. зависимость величины S от Y, которая необходима для решения зависимости (2). Из ЛНОЕ h - tg( (Ь- ftp) up . (4) Сравнивая это выражение с формулой (2 ), получим f-R(l-cos) Ч(Р-Ро) в -45) .Известно, что t(ijj-t(dp 4(..,.t,g.,.) Из ЛОТЗ (7) Введя формулы (3) и (7) в формулу (6 ), получим ,,f,,..p,.(8, 1Г С учетом (5 ) запишем -R(..-co4) После преобразования получим окон чательную зависилюсть { ВЛ1 1-С05) (l-cosI-j Криволинейная поверхность паза, рассчитана для R 100, f 300,мм, 100 мм и k 150 мм (фиго 7), Стереофотограмметрический прибор работает следующим образом. Вначале производится юстировка отсчетнрго устройства по тест-снимк полученным в тех же геометрических условиях, что и рабочие снимки. На тест-снимках имеются контрольные то ки с известными высотными отметками Тест-снимки устанавливаются на снимкодержателях и ориентируются по координатным меткам. После этого штурвалом 7 поперечная каретка 6 смещается до отсчета по шкале 25 Y О, с параллактическим винтом 12 правый снимкодержатель 9 смещается до отсчета .по шкале стрелочного ин дикатора 40, равного 0. В этом положении ребро реостата 26 по которому скользит ПОДВИЖНЫЙ контакт 31, должно проходить через ось 35 рычага 33 После этого штурвалом .7 перемещают каретку 6 вдоль оси Y по всей длине шкалы 25. Если при этом стрелка стре лочного индикатора смещается, то юстировочным винтом 29 смещают реостат 26 и добиваются постоянства нулевого отсчета при движении каретки 6. Посл этого наводят измерительную марку бинокуляра на контрольные точки с иэвестныкм высотными отметками и производят калибровку шкалы стрелочного индикатора 40. Потенциометр 43 предназначен для регулировки диапазона измерений. После окончания юстировки прибора производят измере ние рабочих снимков Для этого снимки устанавливаются в снимкодержатели п(рибора и ориентируются по координатным меткам. После наведения измерит1ельной марки стерео скопа на искомой элемент, например, раковину в стенке трубопровода, снимают отсчеты X и Y по шкалам 24 и 25, а местоположе|ние дефекта по высоте определяют по шкале индикато ра 40. Формула изобретения 1. Стереофотограмметрический прибор, содержащий станину с неподвижной бинокулярной наблюдательной системой, снабженной измерительной маркой, продольную каретку, перемещаемую вдоль оси X прибора, на которой расположена поперечная каретка, перемещаемая вдоль оси Y прибора, с двумя осветителями и снимкодержателями, один из которых выполнен с возможностью перемещения параллак - тическим винтом вдоль оси X прибора, и отсчетную систему, отличающий с я тем, что с целью автоматизации процесса измерения высот по цилиндрическим рентгеновским снимкам, отсчетная система выполнена в виде реостата с равномерным сопротивлением, двуплечего подпружиненного рычага, плоскопараллельной пластины с пазом, имеющим криволинейную поверхность, и стрелочного индикатора, причем реостат закреплен вертикально к плоскости снймкодержателя на параллактической каретке, подвижный контакт реостата закреплен на одном из плеч подпружиненного рычага, установленного на поперечной каретке, другое плечо которого упирается в . криволинейную поверхность паза, плоскопараллельная пластина жестко закреплена на продольной каретке тта-. раллельно оси V йрибора, а реостат электрически соединен с источником постоянного напряжения и стрелочным индикатором, при этом криволинейная поверхность паза определяется из уравнения (l-cos|) где В - базис Съемки; f - фокусное расстояние снимка; g - радиус снимка; V - ордината точки снимка; k - длина плеча рычага от оси вращения до крив олинейной поверхности паза-при Y 0. 2. Прибор по п. 1, отличающ и и с я тем, что/ реостат имеет форму трехгранной призмл, с одним из ребер которого взаимодействует подвижный контакт. Источники информации, принятые во внимание при экспертизе 1.Бобир Н.Я., Лобанов А.Н., Федорук Г.Д. Фотограмметрия. М.,Недра, 1974, с. 33. 2.Феоктистов В.И. Рентгеновское изображение, его метрические свойства и их применение в клинике. Л., 1966, С-. 170 (прототип).
(7, ff гг 23 19 W W 40 jsjezo 13 / / / / /
0 .1.6 7 3 н .38
JLll 38 IB IB 35 yt 3637
l %%:%gg% jg %gjgp
c:
oc ;s SNsNS c c s
y
2 I /
tfujf
n 6
т
v:
15 $
Фт.
И
S§ Г
