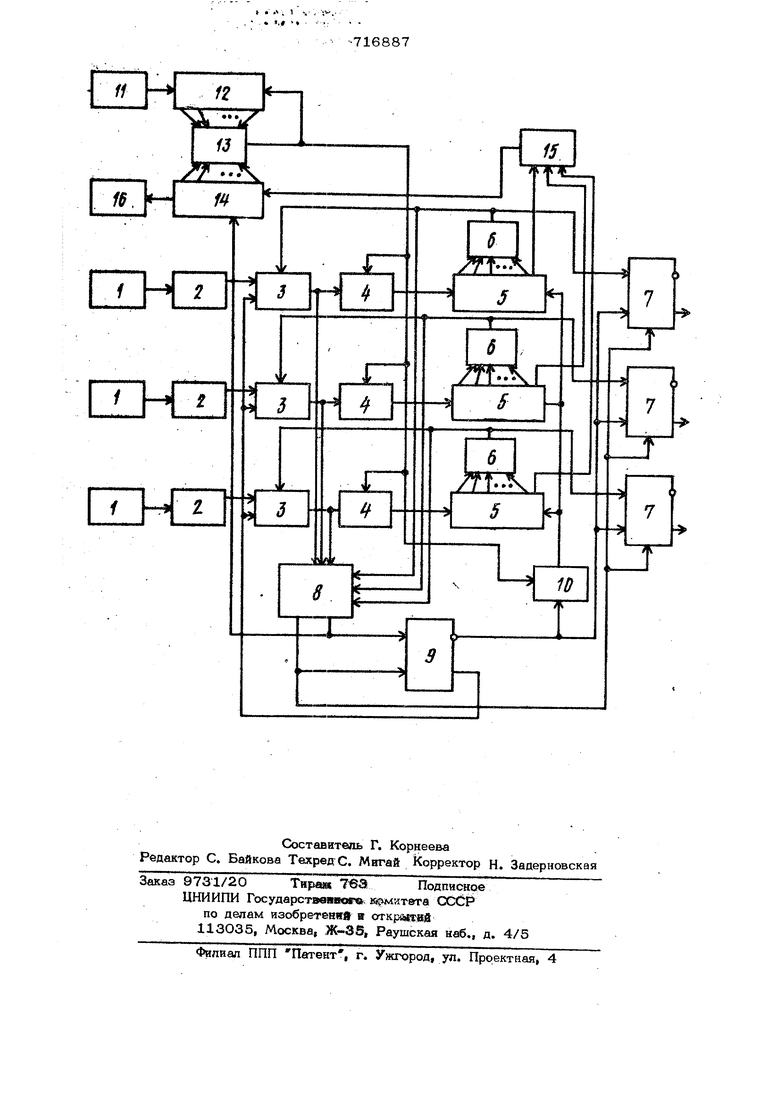
Устройство состоит из члстотньос датчиков 1, соединенных через формиров зте« ли 2 с одними из входов блоков 3 вьщелеиия интервалов счета, выходы которых подключены к конъюкторам 4, установлен ным в шинах сложения счет-пиков 5 опро са, на выходах которЬЕХ подключены дополнительные блоки 6 совпядения, вьоюдь которых подключены к одним ио входов выходных триггеров 7, Другие входы три геров 7 соединены с вьпсодом блока 8 совпадения и инверсным 1зь ходом трнгге« ра 9 прямого и обратного счета, который подключен также к одному из входов коньктора 10, устано1Ы еиного в шин аз; вычитания счетчиков 5 опроса. Устройство содержит также генератор 11 тактовых импульсов и подключенный к его выходу опорный счет-чик 12, одни выходы которого подключены к одним .яз входов блока 13 равнозначкостн, другие входы которого соединены с вьвсодами управляющего счетчика 14. Входы счетчика 14 подключены соответственно к выходам дизыоктора 15, блока 8 совпадения. К другому выходу счетчика 14 подключен дешифратор 16, Устройство работаег следующим образом. Импульсы, пропорциональные числу оборотов колесной пары, поступают с; дат чиков 1 на формирователи 2, гае им придается прямоугольная форма. На вьяо™ дах блоков 3 формируются импульсы, длительность которых равна периоду частоты импульсов, выделяемых датчиками 1 При наличии сигналов от датчиков 1 и сигнала опорной частоты с блока 1Й конъюкторы 4 пропускают опорную частоту на шине сложения счетчиков б, юэторые заполняются Б течение времени рав ноге длительности импульса, формируемого блоком 3, и останавливаются Сигнал с выхода блока 3 поступает также на блок 8, на первом выжоде ксторого формируется импульс только в случае, когда вьщелится последний счета.в каком-либо блоке 3. Таким образом, на первом выходе бло ка 8 формируются импульсы минимагьной частоты, поступающей, с датчиков 1. Они опрокидывают триггер 9, co здaюШ.ИЙ сигнал разрешения, на первый в:сод коныоктора 10, подготавг ивают триггеры 7 к работе и вьщают команду запрет на блоки 3. iia второй вход коныоктора 10 приходит сигнал от блока 13. Коньюктор 10 пропускоот опорную частоту нп шины вычитания счетчиков 5, т.е, происходит вычитпиис записанного числа. Дополнительные блоки G совпадения вьщают сигнал в том случае, если произоишо обнуление счетчиков 5. Сигнал с блока 6 опрокидывает вы.ходиые триггеры 7 и поступает на блок 8, на выходе которого появится сигнал, когда обнулится последний счетчик 5. Этот сигнал опрокидывает триггер 9, запирающий конъюКтор 10 и, следовательно, прекращае1ся заполнение счетчиков S по шиЕЮ вычитания. Кроме того, сигнал с триггера 9 опрокидывает триггеры 7, на аходе которых формирутотся прямоугольные импульсы, длительностью равной разнице частоты опроса и минимальной. Для нача/ а следующего цикла измерения сигналь с блоков 6 подготавливак т к работа блоки 3, а сигнал с триггера 9 снимает команду запрет с блока 3. Поставленная точность измерения в устройстве поддерживается следующим образом. Генератор 11 вырабатывает прямоугольные импульсы с частотой i , заполняющие опорный счетчик 12. Управляющий счетчик 14 по ишне суммирования заполняется минимальной частотой опроса с блока 8. Оба счетчика поразрядно соединены с блоком 13, на выходе которого выделяется импульс тогда, когда произойдет поразрядное совпадение и О в обои,х счетчиках, , Так как опорная частота }д на много больше минимальной частоты опроса, то счетчик 12 много раз заполнится полностью и обнулится в течение времени заполнения управляющего счетчика 14. Следовательно, наступит такой момент, когда произойдет совпадение и О на каком-ллибо Разряде обоих счетчиков. Опорная частота { выбирается такой, чтобы при, минимальной частоте опроса, соответствующей наименьшей скорости движения, совпадение происходило на h 2 разряда, где п - число разрядов. Кроме того, один из счетчиков 5 опроса, который заполнялся в интервал времени, соответствующий минимальной чпстотг- опроса, должен анполниться до П или п -1 рпоряда, В управляющем счетчике 14 всегда записан код, соответствующий минимальной скорости движения колесной пары. На выходе дешифратора 16 снимаетс напряжение, пропорциональное скорости вижения. Формула изобретения Устройство для измерения скорости перемещения и скорости скольжения транспортного средство, содержащее час тотные датчики, установленные на осях колесных пар и подключенные к ним формирователи импульсов, генератор тактовых импульсов, блок совпадения, к выхо дам которого подключены управляющий счетчик и тригтер прямого и обратного счета, известный, выход которого соединен с одним из. конъюкторов, установлен ным в шинах вычитания счетчиков опрос и другие конъюкторы, установленные в шинах сложения счетчиков опроса, о т - личающеес я тем, что, с целью 7 76 увеличения быстродействия на малых скоростях при сохранении точности измерения во всем скоростном диапазоне, оно снабжено подключенным к выходу управляющего счетчика дешифратором, опорным счетчиком с подключенным к его выходам блоком равнозначности, блоками вьщеле- ния интервалов счета, дополнительными блоками совпадения и подключенными к их выходам одними своими входами вьсходными триггерами, другие входы которых соединены с инверсным выходом триггера прямого и обратного счета, при этом входы блоков вьщеления интервалов счета соединены соответственно с выходами формирователей импульсов, прямым выходом триггера прямого и обратного счета и выходами дополнительных блоков совпадения, входы которых подключены к выходам счетчиков опроса. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР кл, В 60 L 3/1О, № 26.О9.72.
716887
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости и скольжения колесных пар транспортного средства | 1983 |
|
SU1111903A1 |
| СИСТЕМА ПОЗИЦИОННОГО ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1970 |
|
SU269246A1 |
| УСТРОЙСТВО для ИНДИКАЦИИ ЭКСТРЕМАЛЬНЫХ ЗНАЧЕНИЙ СИГНАЛОВ | 1970 |
|
SU262451A1 |
| Устройство синхронизации | 1979 |
|
SU773944A1 |
| Цифровое устройство для обнаружения юза и боксования | 1977 |
|
SU725918A1 |
| Измеритель скорости с квазипостоянной погрешностью измерения | 1984 |
|
SU1210099A1 |
| Резонансный уровнемер | 1981 |
|
SU974135A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ НЕРОВНОСТЕЙ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА12 | 1973 |
|
SU384711A1 |
| Цифровой измеритель скорости ультразвука | 1983 |
|
SU1093964A1 |
| Дискретный электропривод со стабилизацией скорости | 1983 |
|
SU1108601A1 |