Известны системы позиционного программного упра вления (СППУ) металлорежущими станками, содержащие блоки ввода и памяти программ, датчики обратной связи (фазовые или импульсные), соединенные с одной стороны с исполнительным органом станка, а с другой через логические элементы - с блоком форми рования команд для управления приводом, перемещающим исполнительный орган стаяка.
Описываемая система позиционного программпого уаравления металлорежущими стариками отличается тем, что к выходам датчиков обратной связи и к выходам блока памяти заданной координаты подключены две группы схем совпадения, осуществляющие поразрядно ввод инфор:мации, одни из которых 1Нбпосредст1венно, а другие через блок аналот-цифра, в сумматор по сигналам с тактирующего распредел.ителя, подключенного одновременно ко входам схем совпадения, блоку аналог-цифра и сумматору, синхронизнровавных генератором связанных частот, а также тем, что в блоке преобразования аналог-цифра ко входам сложения и вычитания реверсивного счетчика подключены ключ сложения и 1КЛЮЧ вычитания, каждый из которых состоит из схемы совпадения и триггера.
шение помехоустойчивости и упрощает конструкцию системы, а также снижает требования к точиости датчиков обратной связи старщи.х разрядов за счет осуществления проиорциональной коррекции цифрового значення каждого разряда координаты по цифровому значению предыдущего младшего разряда.
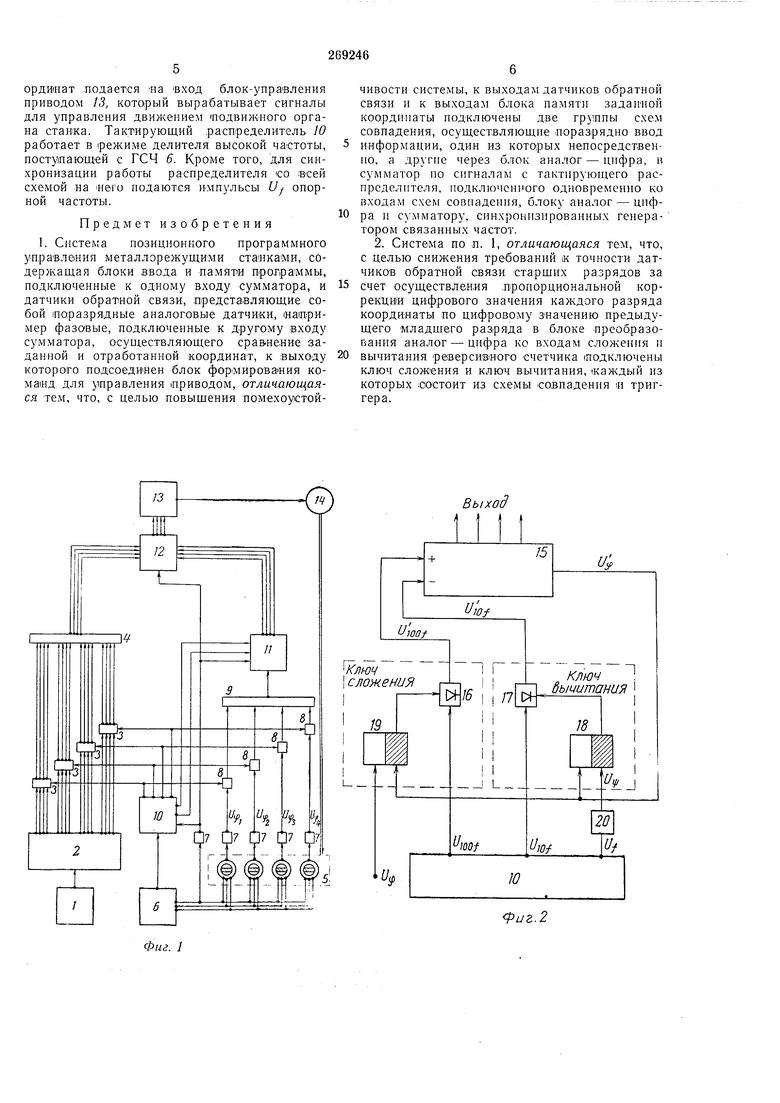
На фиг. 1 изображена структурная схема описываемой системы позиционного пропраммного управления; на фиг. 2 - структурная схема блока преобразования фазы в цифру (блок аналог-цифра); ,на фиг. 3 - временная диаграмма, поясняющая работу блока преобразования фазы в цифру (блок аналог-цифра).
Система позиционного трограммного управления металлорежущими стайками содержит блок ввода программы /, а также блок памяти программы 2. К каждому десятичному разряду памяти присоединены схемы совпадения 3, выходы Которых подключены к входам логического элемента «ИЛИ 4. Блок датчиков обратной связи (ДОС) 5 состоит из редуктора, на осях которого установлены сельсины. Число сельсинов зависит от максимальной величины перемещения подвижного органа. Передача между валами редуктора осуществляется шестеренками с передаточным отнощением 1 : 10. Сельсины приводятся во вращение при двил ении управляемого орга-на при помощи зубчатой рейки. На первичные обмотки сельсинов подается трехфазное напряжение питания от генератора ювязаиных частот (ГСЧ) 6. Ко вторичмым обмоткам сельсинов и к одной из фаз напряжения питания подключены схемы
7,1которые генерируют в момент лерехода синусоидального напрял-сения через ноль. К выходам схем 7 присоединены схемы совпадения
8,выходы которых подключены ко входам логического элемента «ИЛИ 9. Группы схем совпадения 3 и S управляются от тактируюЕ1,его распределителя 10, к шина которого они .подключены. Ко входу блока 11 преобразования фазы в цифру (блок аналог-цифра) подключен логический элемент «ИЛИ 9, а выход блока - ко входу одноразрядного су .мматора 12. К другому входу сумматора 12 присоединен логический элемент «ИЛИ 4.
Информация ic сумматора поступает на блок 13 управления -приводом, двигатель 14 которого осупдествляет движение управляемого органа. Кроме фазового импульса с ДОС и импульсов опорной частоты U к блоку 11 подключены шины от тактирующего распределителя 10, ПО которым подается последовательность импульсов, синхронно Связанных с Емшульсами опорНой частоты (U -имнульсы с частотой в 10 раз больше опорной; 100/ - импульсы с частотой в 100 раз больше опорной).
Блок преобразования аналоговой величины фазового сдвига импульса с ДОС в двоичнодесятичный код (см. фиг. 2) состоит из реверсивного одноразрядного десятичного счетчика 15, на вход которого подключены логические элементы «И 16 и 17, образуюшие с триггерами /8 и 19 два ключа. Первый ключ, состояший из триггера 18 и элемента «И 16, открывается импульсом L с ДОС и закрывается импульсом переполнения счетчика. Второй ключ, состоящий из триггера 19 и элемента «И 17, открывается импульсом .переполнения счетчика и заКрывается опор.ным импульсом f/y.
Блок 20 служит для сдвига импульса олорной частоты и на время - для временного
согласования работы блока. Оба .ключа управляют лоступлшием имлульсов (/ю/ и t/K,,,/ на входы реварсивного счетчика.
Величина .координаты, на которую устанавливается подвижной орган станка, считывается блоко.м 1 ввода лрограммы и запоминается в блоке 2 памяти в двоично-десятичном коде. Схемы 3 совпадения, управляемые поочередно сигналаМИ с тактирующего распределителя 10, опрашивают поразрядно блок 2 памяти, причем опрос ведется от младшего разряда к старшему, а циклы опроса всех разрядов повторяются с частотой сканирования. Синхронно с первой группой схе,.м 3 совпадения работает другая группа схем 5 совпадения, осуществляющих опрос положения ДОС 5. Величина Отработанной координаты выражается
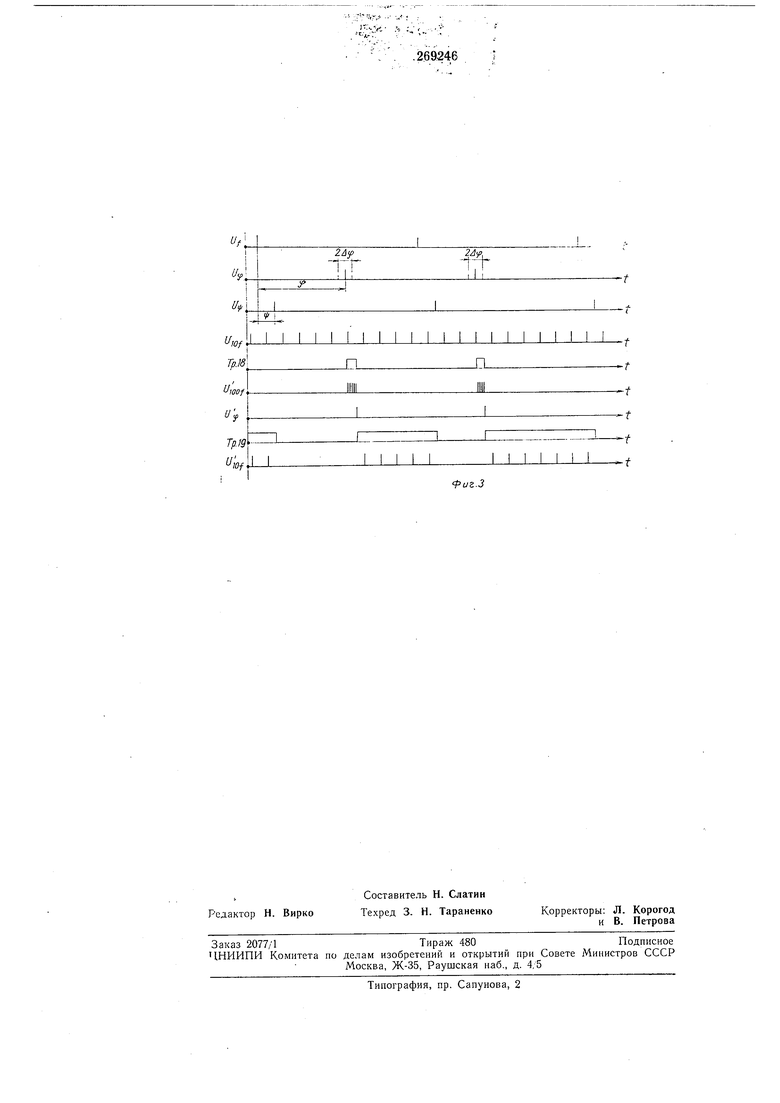
фазовым сдвигом ф импульсов с ДОС, генерируемых схемами 7, по отношению к импульсу Uf онорной частоты (см. фиг. 3). Через логический элбмент «ИЛИ 9 фазовые и.мпульсы (J,f Поочередно поступают на вход блока // нреобразования фазы IB цифру, где кролге преобразования осуществляется поразрядная коррекция. Фазовый иампульс U опрокидывает триггер 18, и через логический элемент «И
16 на вход сложения реверсивного счетчика 15 поступают импульсы . Если в счетчике было уже записано значение предыдущего десятичного разряда, например число 4, то после прихода шестого импульса (/юо/ на выходе счетчика возникает имлульс перевыполнения и ,,, который через триггер 7S прекращает подачу имлульсов , но через триггер 19 и логический элемент 17 разрешает подачу импульсов {7,о ош вход вычитания счетчика 15. Вычитание импульсов происходит до тех пор, лока на триггер 19 не поступит импульс Ос , предста;вляющий собой опорный импульс и , сдвинутый по фазе на
постоянную величину . После этого момента состояние счетчика отражает цифровое значение того десятичного разряда, фазовый имнульс которого U-f поступал на вход бло
На фиг. 3 показана диаграмма работы блока аналог - цифра при обработке результатов считывания только двух разрядов с числовым значением 35 с учетом, что в предыдущем младшем разряде было число 4, т. е. полное число 354.
Из диаграммы видио, что импульсы U „о/ всегда сдвигают фазовый импульс U,f з полол ение и таким образом, что в какой бы момент времени по отношению к опорному импульсу он не пришел, он всегда попадает в середину периода импульсов Ьк,.. Тем самым достигается возмолжость колебания этого импульса от своего истинного положения в зависимости от неточности ДОС в пределах
ДФ ±0,45. Такое колебание никак не
скалжтся на результате определения цифрового значения разряда в счетчике 15. Коррекция десятичного разряда характеризуется сдвигом импульса переполпения U счетчика по отношению к полол ению фазового импульса Uf.
С выхода логического элемента «ИЛИ 4 на вход одноразрядного сумматора 12 поступает поразрядно информация о величине заданной координаты в двоично-десятичном Коде. Одновременно на вход вычитания сумматора 12 подается поразрядно информация о величине отработанной координаты из блока аналог - цифра также в двоично-десятичном коде. В сумматор 12 подаются импульсы Uf опорной частоты, которые управляют работой этого блока. Результат поразрядного сравнения Двух координат подается на щход блок-управления приводом 13, который вырабатывает сигналы для управления движением тодвиж-ного органа станка. Тактирующий .распределитель 10 работает в 1режиме делителя высокой частоты, поступающей с ГСЧ 6. Кроме того, для синхронизации работы распределителя со Всей схемой на «его подаются импульсы Uf опорной частоты. Предмет изобретения . Система позиционного программного управления металлорежущими станками, содержащая блоки ввода и памяти программы, подключенные к одному входу сумматора, и датчики обратной связи, представляющие собой поразрядные аналоговые датчики, иатример фазовые, подключенные к другому входу сумматора, осуихествляющего сравнелие заданной и отработанной координат, к выходу которого подсоединен блок формирования кома1нд для управления приводом, отличающаяся тем, что, с целью повыщения помехоустойчивости системы, к выходам датчиков обратной связи и к выходам блока памят) заданной координаты подключены две группы схем совпадения, осуществляющие поразрядно ввод информации, один из которых непосредственно, а другие через блок аналог - цифра, в сумматор но сигналам с тактирующего распределителя, подключенного одновременно ко входам схем совпадения, блоку аналог - цифра и сумматору, синхронизированных генератором связанных частот. 2. Система по л. 1, отличающаяся тем, что, с целью снижения требований « точности датчиков обратной связи старщих разрядов за счет осуществления .пропорциональной коррекции цифрового значения каждого разряда коорДЕнаты по цифровому значению предыдущего младшего разряда в блоке преобразования аналог - цифра ко входам сложения и вычитания реверсивпого счетчика подключены ключ сложения и ключ вычитания, 1каждый из которых ;оостоит ИЗ схемы совпадения « триггера.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННАЯ КЛАВИШНАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА | 1973 |
|
SU395837A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЦИФРОСИНТЕЗИРУЮЩИМ | 1969 |
|
SU249094A1 |
| Синтезатор частот | 1984 |
|
SU1293841A1 |
| Многокоординатное устройство для управления | 1989 |
|
SU1777121A2 |
| Круговой интерполятор с оценочной функцией | 1976 |
|
SU638916A1 |
| СКОРОСТНОЙ ПРЕОБРАЗОВАТЕЛЬ "АНАЛОГ - ЦИФРА - АНАЛОГ" С БЕСТАКТОВЫМ ПОРАЗРЯДНЫМ УРАВНОВЕШИВАНИЕМ | 2012 |
|
RU2491715C1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1125643A1 |
| УСТРОЙСТВО для КОНТРОЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ | 1970 |
|
SU269600A1 |
| ИМПУЛЬСНО-ФАЗОВАЯ СИСТЕМА ДЛЯ ПОЗИЦИОННОГО ПРОГРАММНОГО УПРАВЛЕНИЯ СТАЙКАМИ | 1969 |
|
SU233401A1 |
Выход
риг.2
A
