(54 УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВЕРТИКАЛЬНОСТИ МАЧТЫ КОПРОВОЙ УСТАНОВКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения отказов сваи,погружаемой молотом копровой установки | 1975 |
|
SU742534A1 |
| Устройство для определения отказов свай | 1976 |
|
SU610917A1 |
| Устройство для определения отказов сваи, погружаемой молотом копровой установки | 1975 |
|
SU785421A2 |
| Отказомер сваебойного агрегата | 1976 |
|
SU568710A1 |
| Устройство для контроля погружения сваи на заданную отметку | 1977 |
|
SU637488A1 |
| Устройство для автоматического останова молота с двигателем внутреннего сгорания | 1976 |
|
SU678144A1 |
| Учебный прибор по физике | 1990 |
|
SU1720069A1 |
| Измеритель толщины среза | 1982 |
|
SU1094962A1 |
| Учебное пособие "маятник | 1980 |
|
SU896670A1 |
| Автомат управления стабилизацией положения транспортного средства | 1986 |
|
SU1399186A1 |
Изобретение относится .к строитель ной технике, точнее к приборам контроля сваепогружающей техники и може быть применено при погружении свай для строительства свойных фундаменто зданий и сооружений различного назначения. Известно устройство для контроля .вертикальности мачты копровой установки, включающее размещенный на мачте датчик в виде маятн1зковых чувствительных элементов, расположенных относительно друг друга под утпом 90°, исполнительный; механизм иисточник питания 1. Недостатком известного устройства является сравнительно невысокая надежность контроля.. Цель изобретения - повышение точности и надежности контроля. Указанная цель достигается тем, что устройство для контроля вертикальности мачти копровой установки, включающее размещенный на мачте датУчик в виде маятниковых чувствительных элементов, расположенных отнрсительно друг друга под углом 90, исполнительный механизм и источник .питания, оно снабжено дополнительны...ми датчиками, установленными, в количестве неменее трех на каждой стороне мачты с маятниковыми элементами в плоско.сти, параллельной плоскости колебания маятника, причем датчики соединены с исполнительным механизмом и источником питания через электромагнитное реле, а.каждый маятниковый элемент снабжен постоянным магнитом. Датчики выполнены в виде герконов и могут быть выполнены также в виде фотоэлементов. Такая конструкция устройства позволяет повысить точность и надежность контроля вертикальности мачты, так как при отклонении мачты от вертикали два крайних геркона посредством воздействия на них магнита,установленного на маятнике, с Помощью исполнительного механизма возвращают мачту в вертикальное положение. Возвращение мачты продолжается до тех пор, пока магнит не войдет в зону воздействия среднего геркона. А это происходит тогда, когда мачта займет строго вертикальное положение. Причем процесс возвращения мачты в вертикальное положение продолжается и тогда, когда магнит по какой-либо причине (например, сильная качка мачты) выходит из зоны воздействия
на крайние терконы; Достаточно того, ;Wе йазгнйт однократно, кратковреШнно входит в зойу воздействия на крайние герконы. В дальнейшем гёрконы спрмЬТйШ°Эл; ;ктрбйагнитных р ё поШ УтоТея vt прЬдолжа бт Г1ропус1кать ейтналы на исполнительный механизм эле1 |5ОМагнитйр гЬ рел РШ Шзсту№Ш ёяг&ст:ё ёпеняая епъ,
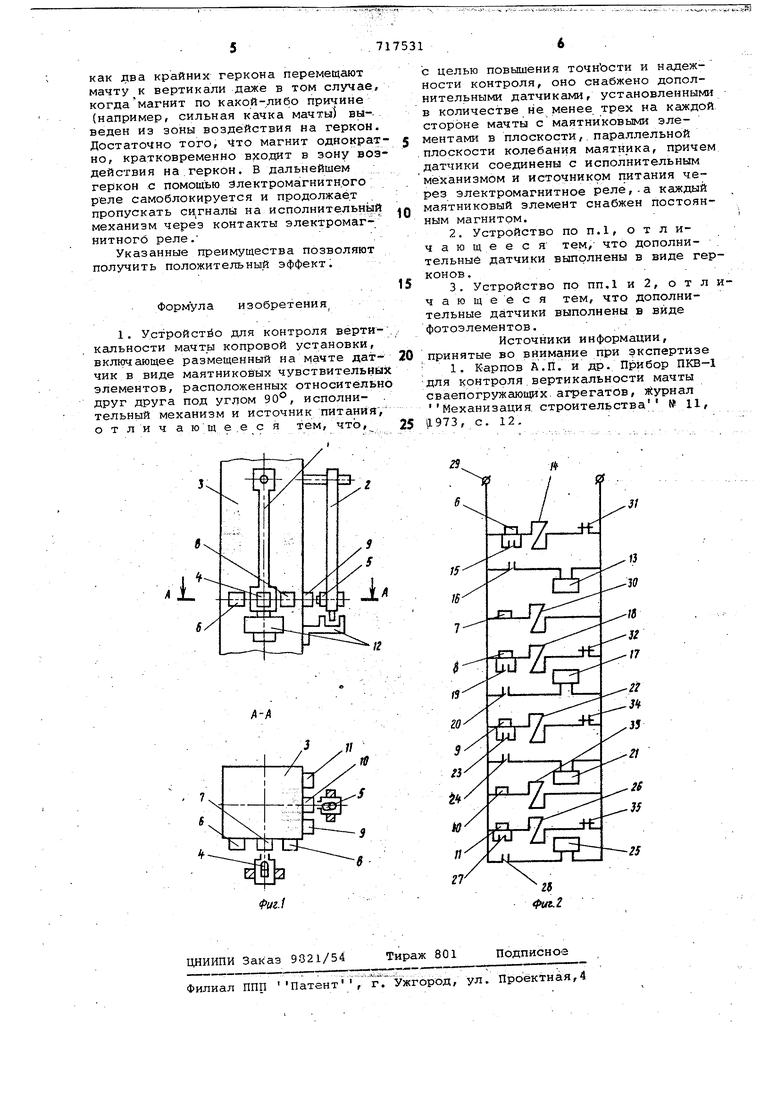
На фиг. 1 представлена схема ком|it5ftbB:KW ret5kofiOiB и маятЙй1 аГ SilFpf гШНа мачте копровой установки; на фиг. 2 - Э ектричеекая cxeriia соёди;йёНЙй ёШВн6в С исполнительными и %ЙектроШгнитными реле. , УстрбйЬтво состоит из двух,;маятниковыЗс элементов 1 и 2, под;вешенных , -.на мачту 3 копровой - установки в двух &э ШЙйбп6рп&ндикуйярных плоскостях. Йа нижних концах -маятников .1 и 2 -:.-- установлены магниты 4 и 5. На мачте 3 против каждого магнита 4 и 5 уста яевлены tto три геркона б, 7, 8, и , Il. Для демпфирования колеба ний ма ятнйкбв 1 и 2 ийёютЬя элёйтрЪ„; ма гнитные демпферы 12, укрепленные на мачте 3 с нижней сторонй йаятников 1 и 2. Геркон 6 соединен с исполнительным механизмом 13 управления наклоном мачты 3 чё1рёз электро ГнЙт«(елеГ- -е 5ёТбя-щеё и -электромагнита 14 Иконтактов 15 и 16. .
Геркон 8 аналогично соединен с и&полнительным механизмом 17 через электромагнитное реле, состоящее из Электромагнита 18 и контактов 19 , АО, Геркон Э соединен с исполнительным механизмом 21Через электромагнитное реле, состоящее из элёктро магнита 22 и контактов 23 и 24. Гер крн 1ТВЬёййнен сисйЪлнительным механизмом 25 через эле тройагйИ Йбе реле, .состоящее из ;злектромагнита SS и контактов 27 и 28. Геркон 7 соединён с источником питания 29 элШ трОйа1:нитное реле, состоящее из электромагнита 30 и контактов 1i 32.Геркон 10 соединен СИсточником -.питания 29 через электромагнитное рШё ; dSefdSiuee.MS электромагнита 33 и контактов 34,. 35. , . Устррйство работает следующим o6pai36tf.- . -,
При Отклонении:-мачты 3 от вертикли (например, влево) маятник 1 такж отклоняется. При этом магнит 4 входит в зону воздействия на гёркон б. При Ьтом контакты геркона б замыкаю сЯ, и электро маг ит 14 .ничвается. Контакты 15 и 1 ё э г11ЙЗМйтСя При этом геркбн б самоблокируется, рёесШ€йёая прохо5 СденИё через . -элёктрОма;гнит i4 да тогда,.кЬгда Магнит 4 выходит из зоны воздействи на теркон б. Поэтому контакт 16 на зШда ся в замкнутом состоянии и TfpotfycrKaeT сигм ал на и сполнительный механизм. При этом мачта 3 возвращается в вертикальное положение.
При достижении мачтой 3 вертикального положения магнит 4 входит в зону воздействия на гёркон 7. При этом его .контакты замыкаются, и электромагнит 30 нашгничивается и последний прерывает контакт 31. При этом электромагнит 14 размагничивается, и контакты 15 и 16 прерываются. Подача сигнала на исполнительный механизм 13 прекращается. Прекращается и перемещение мачты 3..
При отклонении мачты 3 в другую сторону (вправо) аналогично действует гёркон 8 и электромагнит 18с контактами 19 и. 20. :.-.. . : .,
При отклонении мачты 3 от вертикали 1в перпендикулярной плоскости подобным образом ведут себя герконы 9 и 11 . V .
Для Ьашения чрезмерных колебан1 й ма.ятникрв 1 и 2служат электромагнитные демпферы 12. Устройство можно йа.строиТь не только для контролявертикйленЬсти мачты, нО и для установки и поддержания мачты 3 с любым .наперед:Заданным углом, наклона. |р1Я достаточно герконы переме Стить в гОрИзОйтальном направлении.
Устройство может быть выполнено и без магнитов. В этом случае подби айтся соответствующие герконы, ,спо.собные реагировать на ферромагнитный
материал. . .. Устройство может быть выполнено также без гёрконов. В этом случае. вместо гёрконов устанавливаются .на мачту генераторные бесконтактные датчики. А маятник выполняется без магнитов . Бесконтактные генераторные датчики реагируют на ферромагнитный материал маятника и посылают сигнал , на исполнительный механизм при входе . маятника в зону воздействия на них..
При этом схема соединения бескбнтактных генераторных датчиков с электрЪмагнитными реле и с исполнительными механизмами управления наклоном мачты аналоги на jiepBOMy варианту с герконами.- .
I-. -Вместо гёрконов могут быть применены также фотоэлементы при условии замены магнитов на источники света. соёдийенИя элементов устройства при эТОМ 0СТается также аналогичной.
Применение предлагаемого устройства в строительном производстве дает следующие преимущества:
