Изобретение относится к устройствам управления исполнительными механизмами транспортных средств, преимущественно автоматическим.
Цель изобретения - повышение эффективности управления автомата стабилизации путем регулирования массы маятника в функции амплитуды его колебаний.
На фиг. 1 показано устройство в разрезе; на фиг. 2 - положение маятника с грузом; на фиг. 3 то же, без груза.
Автомат управления стабилизацией положения транспортного средства содержит маятниковый датчик 1 крена, подвешенный на горизонтальной оси 2 в отдельном корпусе 3 с упорами 4. Центр масс маятника расположен ниже оси подвеса. Вблизи центра масс маятника на маятнике установлен электромагнит 5. Цепь 6 питания электромагнита содержит устройство 7 управления силой электромагнитного поля с органом 8 управления. В частности оно может быть выполнено в виде реостата с подвижным контактом. Возможно и другое исполнение, когда сила электромагнитного поля изменяется не плавно, а дискретно. Для этого магнит выполняется из нескольких независимых секций или количеств обмоток и обеспечивается управление подключением к источнику 9 питания различных количеств секций или обмоток. Орган 8 управления силой электромагнитного поля (движок реостата или переключатель секций или обмоток) кинематически связан с маятником, что обеспечивает ослабление электромагнитного поля при отклонении маятника от вертикали.
Маятник связан посредством тяги и шарниров с золотником управления им гидрораспределителя 10 и снабжен гидравлическим демпфером 11 для гашения колебаний.
Днище 12 корпуса автомата выполнено подвижным по высоте, например, в виде ввинчиваемой в корпус тарелки и фиксировано от проворачивания стопорным винтом 13. На днище расположен сыпучий материал из магнитомягкого ферромагнетика, выполненный, например, в виде сферических тел 14 качения. Поверхность днища, обращенная в полость корпуса, выполнена вогнутой, например, в виде участка сферы с вертикальным диаметром, проходящим через центр масс маятника и ось его подвеса. Такая форма днища обеспечивает сбор тел 14 качения в его центральной части под маятником.
Выполнение тел качения из ферромагнетика, в частности из железа или низкоуглеродистой стали, обеспечивает их притяжение электромагнитом к маятниковой массе и удержание на ней до тех пор, пока сила электромагнитного поля превышает силу гравитационного поля земли. Поскольку при этом играет роль масса тел качения, то
0
5
0
5
0
5
0
5
0
5
для повышения плавности регулирования общей маятниковой массы (суммарной массы маятника с обмоткой электромагнита и тел качения) последние выполнены различной массы. Выбор магнитомягкого ферромагнетика обусловлен стремлением уменьшить остаточную намагничиваемость тел качения (остаточную индукцию). Из этих соображений и маятниковая масса, являющаяся одновременно сердечником электромагнита, выполнена из магнитомягкого ферромагнетика. В результате при размыкании цепи электромагнита тела качения возвращаются на днище под действием силы тяжести и скатываются к его центру. При ослаблении электромагнитного поля в начале отрываются от маятника тела качения большей .массы. Тела качения меньщей массы отрываются в последнюю очередь, располагаясь сверху тел качения, оторвавшихся ранее. При увеличении силы электромагнитного поля первыми притягиваются тела качения меньп ей .массы, а затем большей, налипая на них сверху.
Для того, чтобы влияние материала корпуса и днища на взаимодействие тел качения с электромагнитом было минимальным, в качестве этого материала применяют диамагнетик или парамагнетик, магнитная проницаемость которых близка к единице, а магнитное поле в них ослабляется или соответственно возрастает лишь незначительно (медь, алюминий, пластмасса, керамика).
На фиг. 1 изображены также реостат 15 для ручного регулирования силы электромагнитного поля, выключатель 16 цепи питания, силовой исполнительный цилиндр 17 механизма стабилизации и питающая его гидросистема 18с предохранительным клапаном 19 и сливом 20.
Устройство работает следующим образом.
Посредством выключателя 16 замыкают цепь питания электромагнита 5. В результате тела качения 14 окажутся притянутыми к маятнику, общая масса которого возрастет (фиг. 2). При отклонении маятника от исходного вертикального сюложения получит перемещение кинематически связанный с ним орган управления 8 силой электромагнитного поля от исходного положения, в данном случае движение реостата. Возрастающее сопротивление цепи приведет к ослаблению протекающего через обмотку электромагнита тока, а следовательно, напряженности магнитного поля в ней. В результате наиболее тяжелые тела качения окажутся оторванными силой тяжести и возвратятся на днище (фиг. 3). Общая маятниковая масса уменьшится. Процесс умень- щения маятниковой массы будет продолжаться по мере возрастания отклонения маятника. При этом реостатом 15 можно изменять количество тел качения, ностоян- но находящихся на маятнике и периодически возвращающихся на днище. Например, при уменьшении сопротивления цепи может быть обеспечено то, что в исходном положении маятника все тела качения будут притянуты электромагнитом, а в крайних положениях только часть из них (наиболее тяжелые) смогут оторваться и возвратиться на днище. При увеличении сопротивления цепи реостатом 15 в исходном положении маятника только наиболее легкие тела качения останутся притянуты электромагнитом, а самые тяжелые останутся на днище. В крайних положениях дополнительно ослабленное реостатом электромагнитное поле не в состоянии будет удерживать ни одного тела качения. Кроме как реостатом на зависимость массы маятника от угла отклонения можно влиять также изменением расстояния днища от электромагнита. Увеличивая это расстояние путем вращения днища против часовой стрелки, обеспечивают притяжение электромагнитом только части наиболее легких тел качения, а уменьшая вращением днища по часовой стрелке, увеличивают количество притягиваемых тел качения. Повышение эффективности автомата управления ожидается следующим образом. В исходном положении имея максимальную массу при данном сопротивлении цепи, установленном реостатом 15, и данном расположении днища 12 по высоте, маятник в состоянии развить значительную боковую составляющую от веса на связывающий его с осью подвеса 2 стержень при незначительном крене корпуса 3 совместно с остовом транспортного средства. Следовательно, увеличивая .массу маятника, повышают чувствительность автомата. Боковая составляющая силы веса, преодолевая силы трения в оси подвеса и сопротивление золотника гидрораснределителя 10 и демпфера 11, обеспечит перемеп ение маятника в сторону крена. По мере неремеп1ения маятник будет терять массу вследствие возрастания сопротивления цегщ электромагнита, обеспечиваемого реостатом. В крайнем положении, соответствующем полному переключению золотника из нейтральной позиции в рабочую, масса маятника будет минимальной. Однако боковая составляющая силы веса возрастет вследствие возрастания угла отклонения маятника и будет в состоянии возвратить золотник в исходное положение, как только остов транспортного сре.чства и установленный на нем корпус 3 займут вертикальное положение (фиг. 3).
Уменьшенная .масса маятника в крайнем положении будет иметь уменьшенную потенциальную энергию, которая при переходе им нейтрального положения полностью превратится в кинетическую. Однако в соответствии с законом сохранения количества движения (импульса) маятник будетпере- ходить нейтральное положение с меньшей скоростью в случае возрастания его массы, чем в случае, когда масса постоянна. Благодаря этому маятник будет совершать свободные затухающие колебания относительно исходного положения с меньшей а.мпПо
литудои, которую регулировкой системы можно свести в зону нечувствительности автомата, определяемую как угловое отклонение маятника, достаточное для начала срабатывания гидрораспределителя.
5Таким образом, автомат-стабилизатор с
переменной в зависимости от амплитуды колебаний маятниковой массой имеет более высокую эффективность благодаря, с одной стороны, повышению его чувствительности, с другой - уменьшению амплитуды свобод0 ных затухающих колебаний.
Формула изобретения
1.Автомат управления стабилизацией 5 положения транспортного средства, содержащий маятниковый датчик крена, подвешенный на горизонтальной оси в отдельном корпусе с днищем, причем центр масс маятника расположен ниже оси подвеса, электромагнит, установленный на маятнике
0 вблизи центра масс, цепь питания электромагнита с органом управления силой электромагнитного поля, связанные с маятником гидравлический распределитель и демпфер. отличающийся тем, что, с целью повышения эффективности управления путем регулиро5 вания массы маятника в функции амплитуды его колебаний, он снабжен сыпучим материалом из магнито-мягкого ферромагнетика, расположенны.м в полости корпуса на днище под маятником, причем орган управления силой электромагнитного поля кинематически связан с маятником.
2.Автомат по п. 1, отличающийся тем, что сыпучий материал выполнен в виде сферических тел качения различной массы.
3.Автомат по п. 1, отличающийся тем, 5 что днище выполнено вогнутым.
4.Автомат по п. 1, отличающийся тем, что днище установлено в корпусе с возможностью перемещения по высоте и снабжено фиксатором положений.
5.Автомат по п. 1, отличающийся тем, 0 что корпус с подвижным днищем выполнен
из материала с низкой магнитной проницаемостью и магнитной восприимчивостью.
6.Автомат по п. 1, отличающийся тем, что днище выполнено из диамагнетика.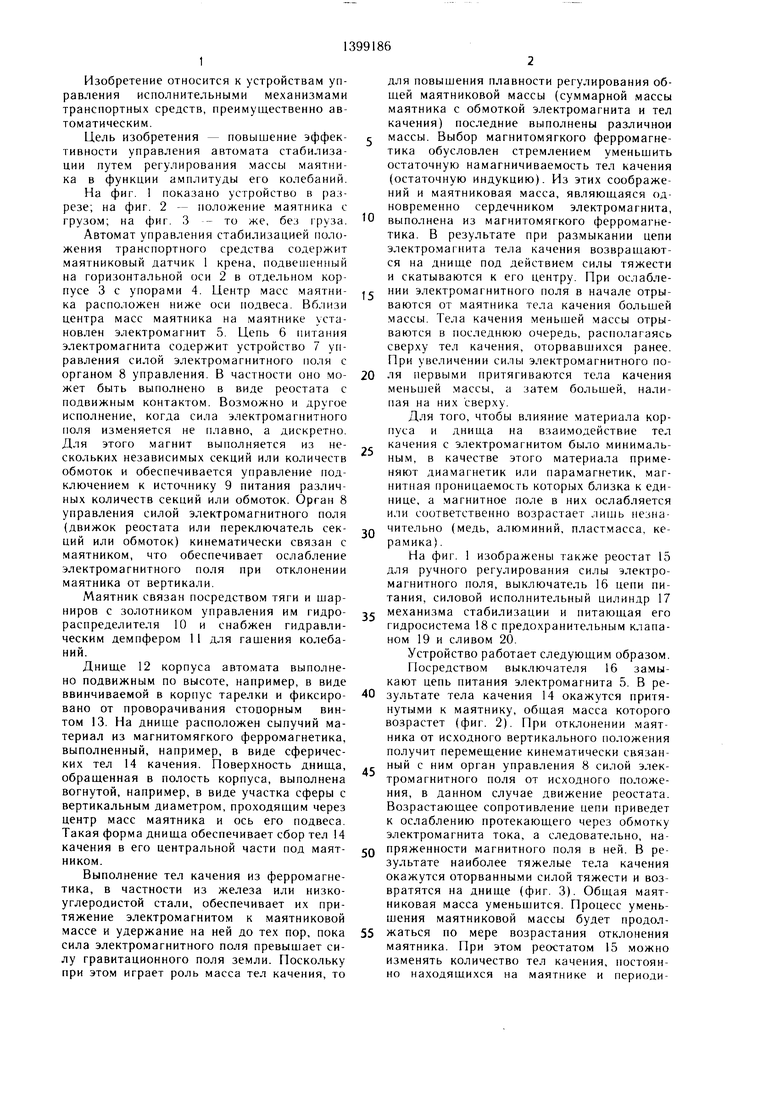

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления выравниванием остова транспортного средства | 1984 |
|
SU1240640A2 |
| БИОСЕКРЕТ | 1994 |
|
RU2133048C1 |
| Гироскопический указатель крена железнодорожных или иных вагонов | 1947 |
|
SU71757A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| ПРОТИВОУГОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2021928C1 |
| Автомат управления положением остова транспортного средства | 1986 |
|
SU1395528A1 |
| Акселерометр космический | 2019 |
|
RU2721589C1 |
| СИСТЕМА ПОВЫШЕНИЯ УСТОЙЧИВОСТИ ТРАНСПОРТНОГО СРЕДСТВА ПРОТИВ ОПРОКИДЫВАНИЯ | 2011 |
|
RU2487812C2 |
| Автомат-стабилизатор крутосклонногоТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU816801A1 |
| КОЛЕСО НА МАГНИТНОЙ ПОДУШКЕ | 2010 |
|
RU2431573C1 |

Изобретение может быть использовано в устройствах управления исполнительными ме.ханизмами систем стабилргишии положения, в частности, транспортных средств. Ио сравнению с известными авто17 матами оно позволяет повысить эффективность управления автомата стабилизации путем регулирования массы маятпика в функции амплитуды его колебаний. Для siToi o маятниковый датчик 1 крена выполнен неременной массы благодаря снабжению его сыпучим материалом в виде сферических тел 14 качения, расположенных на вогнутом днин1е 12. Кроме того, маятник снабжен обмоткой электромагнита 5, цепь 6 питания которой содержит орган 8 управления силой электромагнитного поля в функции амплитуды колебаний. (Сыпучий материа.т выпо.чняют из магнитомягкого ферромагнетика в виде сферических тел качения различно11 массы. 5 з.л. ф-лы, 3 и. Г (Л со со ас О5
| Устройство управления выравниванием остова транспортного средства | 1984 |
|
SU1240640A2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
