Способы автоматизации работы исполнительных органов машин-орз-дий известны.
Отличительной особенностью описываемого способа от известных является то, что каждый мехапнЗ М гюдачи пспс./нительного органа машины-орудия кинематически связывают с оргапом управления, включающим в себе несколько элементов, одной части которых, предназначенной д.гя ограничения дг- ижения нсполгнтельного органа в пределах дс,1евых значений еднницы системы 1)змере1п-ш, сообщают ненрерывное движение, синхронное с движением испол1н-1телы1ого органа, а части элемептов, предназначенной для ограничения движення испо.лнительного органа в пределах це.тых . сообщают прерывистое движепие с тем, чтобы при одновремеппом замыкании обоими указанными элемещ-амн органа управления цепи нснолните.льпого органа посылать еоотзетствуюгнне имнзльсы в ejo привод. Подача двух команд для управлеьия исполпите,яьным оргапом обеспечивает высо ;ую точность ограничения перемеHie/n-fir испо.тннтельиых органов.
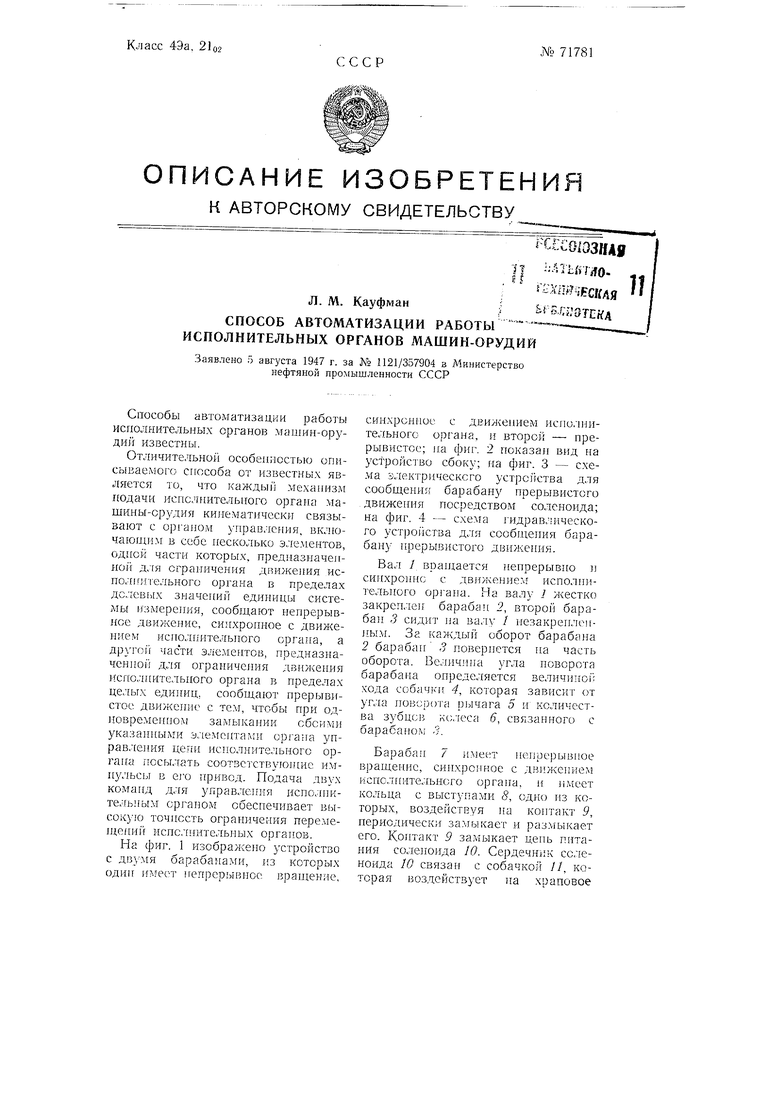
На фиг. 1 изображено устройство с двумя барабанами, из которых ОДИ1Г имеет 1гепрерывиое вращение.
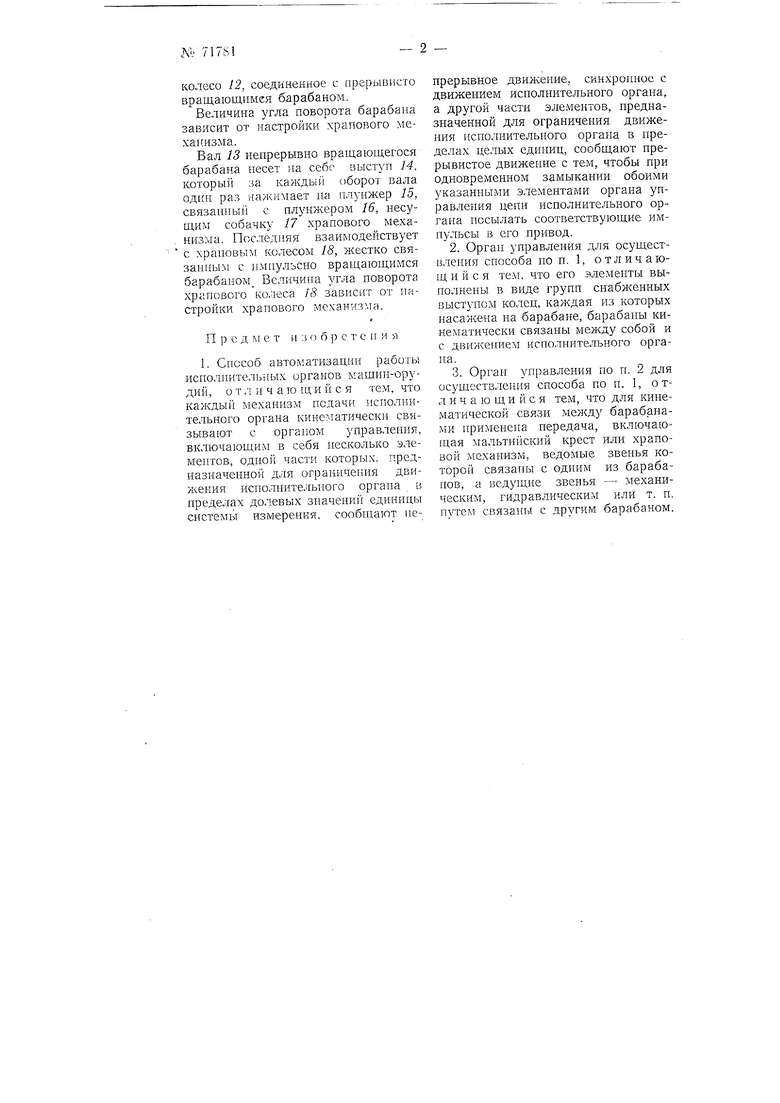
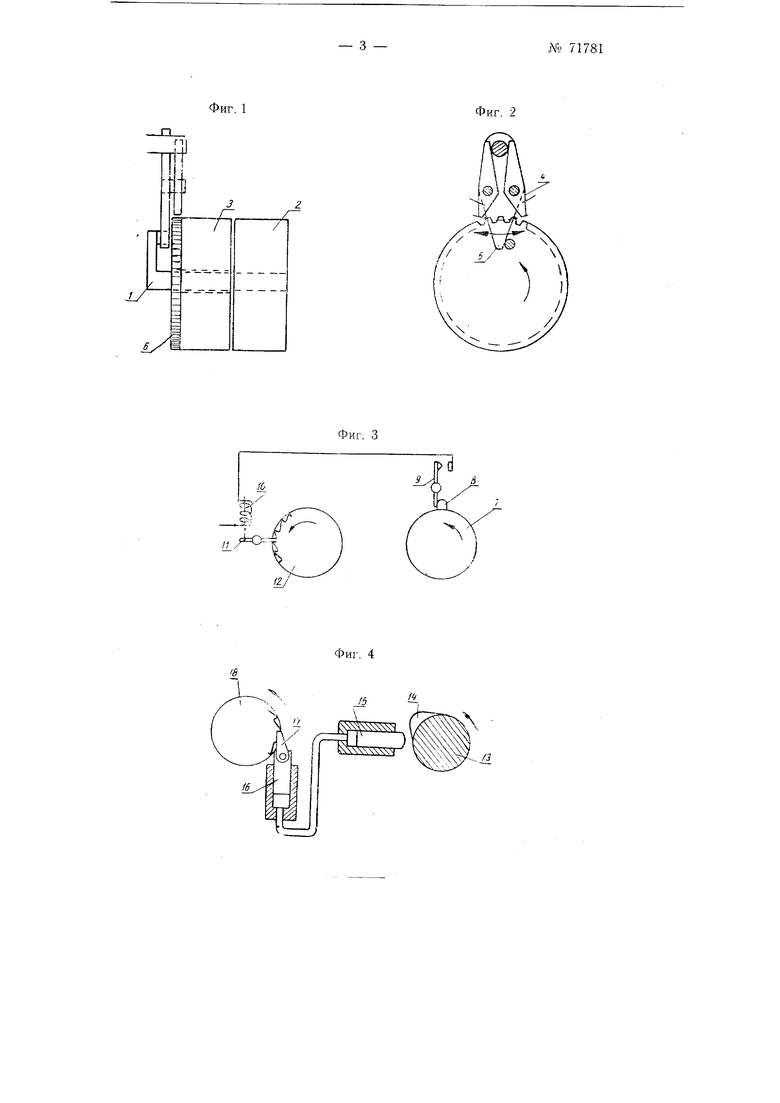
синхронное с движением исиол1П1тельного органа, н второй - прерывистое; па фиг. 2 показал вид па устройство сбоку; на фиг. 3 - схема электрического ycrpoiicTBa для еообщения барабану прерывистого движения посредством соленоида; на фиг. 4 - схема гидравлического устройства для сообще1Н- я барабану прерывистого движения.
Вал J врангается непрерывно и синхронно с дв)1/кением исполпительного opiana. На J жестко закреплеп барабан 2, второй барабан 3 сидит на валу / незакренленным. За каждый оборот барабана 2 барабан . повернется па часть оборота. Велнчпга угла поворота барабана онределяется величиной хода собачкн 4, которая зависит от угла новорота рычага 5 и количества зубцов ко,теса 6, связанного с барабанол; ..
Барабан 7 имеет пепрерывпое вращепие, снггхроиное с дв жепием исполгп-Пельного оргапа, н имеет кольца с выступами с, одно из которых, воздействуя на коитакт 9, нернодически замыкает н размыкает его. Контакт 9 за.мыкает цепь питания соленоида 10. Сердечник co.ieноида 1G связан с собачкой //, которая воз.аействует на храповое
колесо 12, соединенное с прерывисто вращающимся барабаном.
Величина угла поворота барабана зависит от настройки храпового механизма.
Вал 13 непрерывно вращающегося барабана несет на себе зыстун 14, который за каждыГ оборот вала одни раз нажимает на нлунжер 15, связанный с нлунжером 16, несущим собачку 17 храпового механизма. Последняя взаимодействует с храновыл колесом 18, жестко связанным с н.мнульсно вращающимся барабаном Величина утла поворота храпового колеса 18 зависит от настройки храпового механизма.
П 5 е д м е т и з о б р с т с н и я
1. Способ автоматизации работы исполнительных органов мащин-орудий, о т л и чаю щ и и с я тем. что каждый механизм подачи истюлнительного органа кинематически связывают с органом управления, включающим в себя несколько элементов, одной части которых, предназначенной для ограннчения движения исиолнительного органа в пределах долевых значений единицы системы измерения, сообщают непрерывное , синхронное с движением исполнительного органа, а другой части элементов, предназначенной для ограничения движения исполиительного органа в пределах целых единиц, сообщают прерывистое движеиие с тем, чтобы при одновременном замыкании обоими указанными элементами органа управления цепи исполнительного органа носылать соответствующие имнульсы в его привод.
2.Орган управления для осуществления способа по н. 1, отличающийся тем, что его элементы выполнены в виде групп снабженных выступом колец, каждая из которых насажена на барабане, барабаны кинематически связаны между собой и с движением иснолнительного органа.
3.Орган уп)авления по п. 2 для осуществления способа по п. 1, отличающийся тем, что для кинематической связи между барабанами применена передача, включающая мальтийский крест или храповой механизм, ведомые звенья которой связаны с ОД1ЩМ из барабаиов, а )5едущне звенья - механическим, гидравлическим или т. п. путем связаны с другим барабаном.
JL/