Автоматизацию работы исполнительных органов машин-орудий предлагается осуществить при помощи способа, заключающегося в том, что каждый механизм подачи исполнительного органа кинематически связывают с органом управления, состоящим из нескольких элементов, часть которых выполнена так, что они периодически замыкают цепь исполнительного органа для посылки импульсов, ограничивающих движе. ние исполнительного органа в пределах целых единиц принятой системы измерения. Другая часть из этих элементов получает движение синхронное с движ:ением исполнительного органа для посылки импульсов, ограничивающих движения в пределах долей единицы при замыканни цепи обеими группами элементов органа зправления.
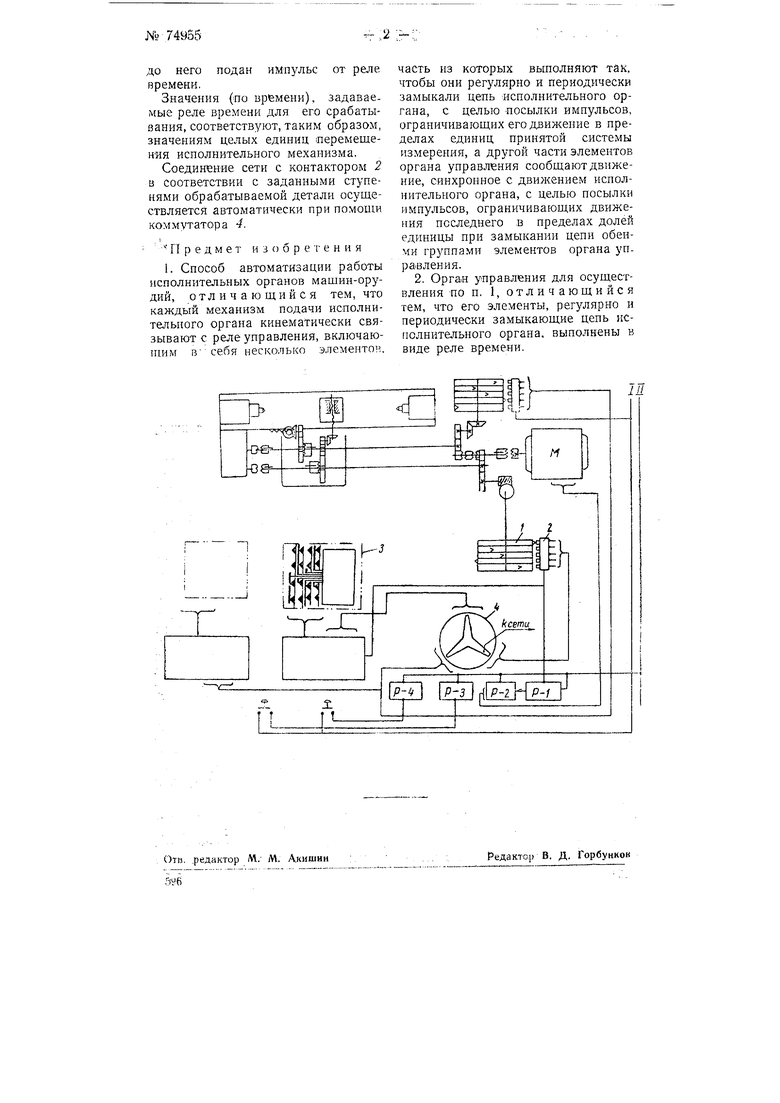
Для осуществления способа автоматизации работы исполнительных органов предлагается з стройство, работа которого поясняется схемой, изображенной на чертеже.
Механизмы продольной и поперечной подачи токарного станка кинематически связаны с барабаном 1, один оборот которого соответствует перемещению исполнительного меха38
низма на принятую в расчет единицу измерения.
На барабане / имеются кольца с выступами, расположенными по окружности таким образом, что при вращении барабана они касаются контактора 2, и подаваемый при этом импульс ограничивает перемещение исполнительного механизма в пределах части единицы измерения, отвечающей размеру обрабатываемой поверхности. Для того, чтобы подаваемые барабаном 1 имнульсы соответствовали не только перемещению исполнительного органа на дробную часть заданного размера, но и на весь заданный размер, в электрическую цепь, связывающую барабан 1 с исполнительным органом, включено реле времени 3, время срабатывания которого устанавливается с интервалами, соответствующими по Бремени такому числу оборотов барабана 1, прикотором исполнительный орган перемещается на размер заданных целых единиц излгерения.
Импульс от барабана 1 воспринимается исполнительным органом только в том случае, когда одновременно ,с ним или предварительно
595
до него подан импульс от реле, времени.
Значения (по Бремени), задаваемые реле времени для его срабатывания, соответствуют, таким образом, значениям целых единиц перемещения исполнительного механизма.
Соединение сети с контактором 2 в соответствии с заданными ступенями обрабатываемой детали осуществляется автоматически при помощи коммутатора 4.
Предмет и з о б р е т е н и я
1. Способ автоматизации работы исполнительных органов машин-орудий, отличающийся тем, что каждый механизм подачи исполнительного органа кинематически связывают с реле управления, включающим В себя несколько элементов.
часть из которых выполняют так, чтобы они регулярно и периодически замыкали цепь исполнительного органа, с целью посылки импульсов, ограничивающих его движение в пределах единиц принятой системы измерения, а другой части элементов органа управления сообщают движение, синхронное с движением исполнительного органа, с целью посылки импульсов, ограничивающих движения последнего в пределах долей единицы при замыкании цепи обеими группами элементов органа управления.
2. Орган управления для осуществления ПО п. 1, отличающийся тем, что его элементы, регулярно и периодически замыкающие цепь исполнительного органа, выполнены в виде реле времени.