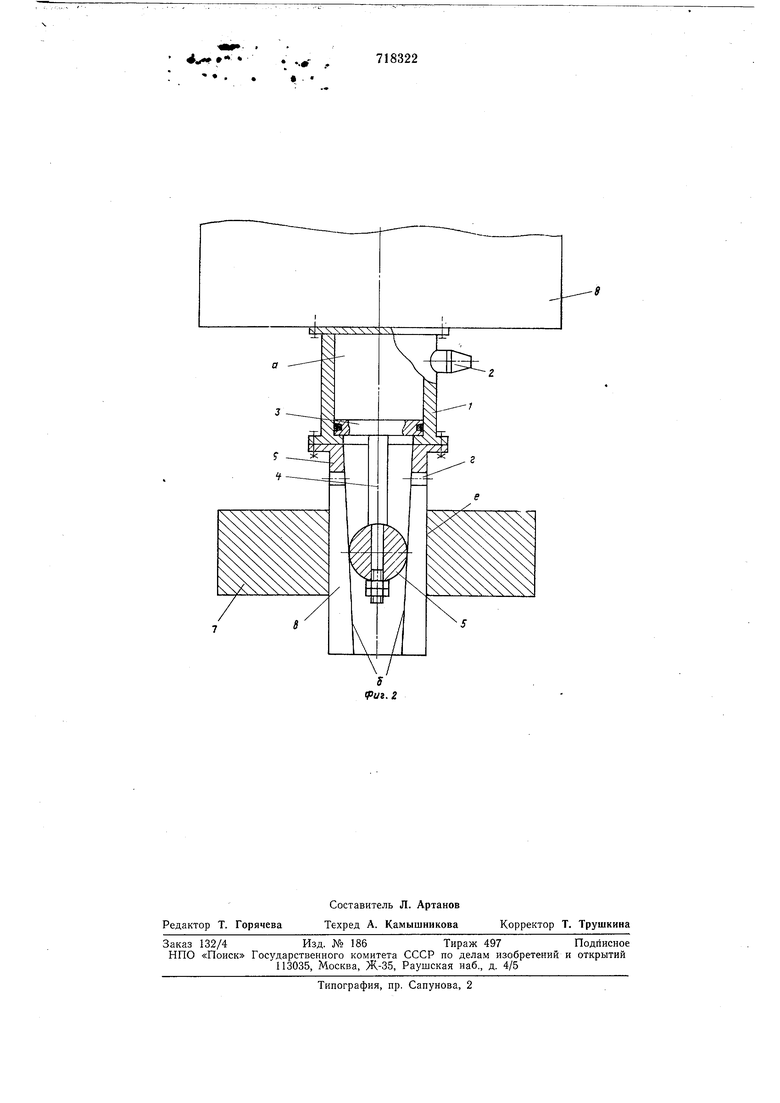
На поверхность дополнительного цилиндра 6 надевается груз-противОвес 7, образуя соединения с малым зазором. После этого нагнетается воздух необхоДйййго давлёнйя в поршневую полость а цилиндра I через штуцер 2. Поршень 3, шток 4 и закрепленный на штоке ползун 5 начнут перемеш,аться. Ползун 5, перемеш,аясь по направлению меньшего диаметра конуса, деформирует дополнительный цилиндр 6. Таким образом, зазор между отверстием груза-противовеса 7 и цилиндром 6 будет выбран деформацией. В этом случае образуется плотное соединение груза-противовеса с цилиндром б, имеющим накатку, увеличиваюшую трение. Так как перемещение ползуна 5 происходит до упора поршня 3 в торец, то последующее увеличение давления в поршневой полости а рабочего цилиндра не ведет к перемещению поршня 3 и соответственно и сферического ползуна 5. Последующее увеличение давления воздуха в поршневой полости а осуществляется в соответствии с глубиной срабатывания автономного подводного зонда. При погружении автономного зонда на глубину на внешнюю поверхность поршня 3 воздействует гидростатическое давление среды, но поршень 3 не перемещается до тех пор, пока давление в полости а больше давления внешней среды. Как только давление внешней среды будет превосходить давление в полости а, поршень 3 и соответственно и ползун 5 начинают перемещаться в направлении большего отверстия поверхности б цилиндра 6. Перемещение продолжается до полного выхода ползуна 5 из сопряжения с конусной поверхностью. Но так как деформация цилиндра 6 была упругой, то после выхода ползуна 5 из сопряжения с поверхностью б, деформация исчезает и образуется первоначальный зазор, достаточный для свободного перемещения груза-противовеса 7 относительно
цилиндра 6. Таким образом, происходит разъединение груза-противовеса 7 с цилиндром G. После сброса груза-противовеса 7 CБoбoдt o падающий контейнер 8, приобретая положительную плавучесть, всплывает.
Формула изобретения
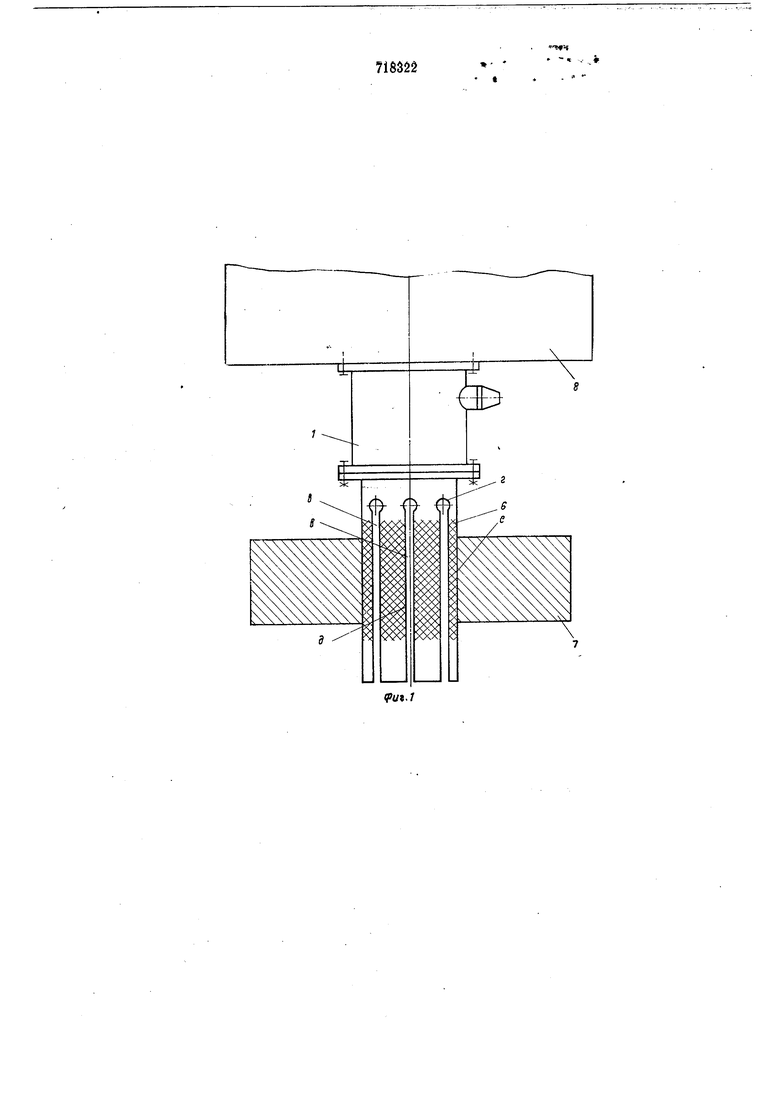
1. Автономный подводный зонд для погружения и автоматического всплытия на заданной глубине, включающий контейнер с узлом балластировки, связанным кинематической передачей с исполнительным по глубине положения рабочим органом, включающим рабочий цилиндр с порщнем и силовым элементом, отличающийся тем, что, с целью упрощения конструкции и повыщения надежности в эксплуатации, узел балластировки содержит груз-противовес с отверстием, а кинематическая передача содержит цилиндр с внутренней конической поверхностью и с продольными прорезями, переходящими в круглые вырезы, а также сферический ползун, при этом силовой элемент выполнен в виде щтока, прикрепленного к поршню, сферический ползун смонтирован на штоке, а дополнительный цилиндр выполнен сопрягаемым внешней поверхностью в зоне продольных прорезей со стенками отверстия в грузе-противовесе, а внутренней конической поверхностью выполнен сопрягаемым со сферическим ползуном, причем поршневое пространство рабочего цилиндра заполнено сжатым воздухом, а дополнительный цилиндр прикреплен к рабочему цилиндру.
2. Зонд по п. 1, отличающийся тем, что внещняя поверхность дополнительного цилиндра в зоне продольных прорезей выполнена с накаткой.
Источники информации,
принятые во внимание при экспертизе
1. Патент США № 3800346, кл. 9-8, 02.04.1974 (прототип).