I
Изобретение относится к горному делу, а именно к шнекобуровым машинам для выемки полезного ископаемого.
Известны буровые машины для направленного бурения, в которых производится контроль направления бурения скважины и воздействие на механизм принудительного отклонения бурового снаряда 1.
Недостатком этой буровой машины является необходимость наличия проводной связи оператора с инструментом.
Известен также способ автоматического управления горным комбайном в профиле пласта и устройство его выполнения, содержащее выемочный рабочий орган, пилот-бур с корпусом и рабочим органом, буровой став, механизм отклонения выемочного рабочего органа относительно почвы и кровли пласта, двигатель враш,ения с редуктором, датчики границы «порода-уголь, размещенные в корпусе бура и электронно-преобразующий блок 2.
Недостаток этого устройства - невозможность осуществления опережающего контроля пространственного положения исполнителыюго органа и пониженная точность направленного бурения.
Цель изобретения - осуществление опережающего контроля пространственного положения исполнительного органа и повышение точности направленного бурения.
Цель достигается тем, что пилот-бур установлен внутри бурового става с возможностью перемещения в осевом направлении относительно этого става и снабжен индивидуальным механизмом вращения и осевой подачи.
Цри этом механизм вращения и осевой {годами выполнен из телескопического гидроцилиндра, соединенного одним концом с пилот-буром, а другим - с редуктором двигателя вращения.
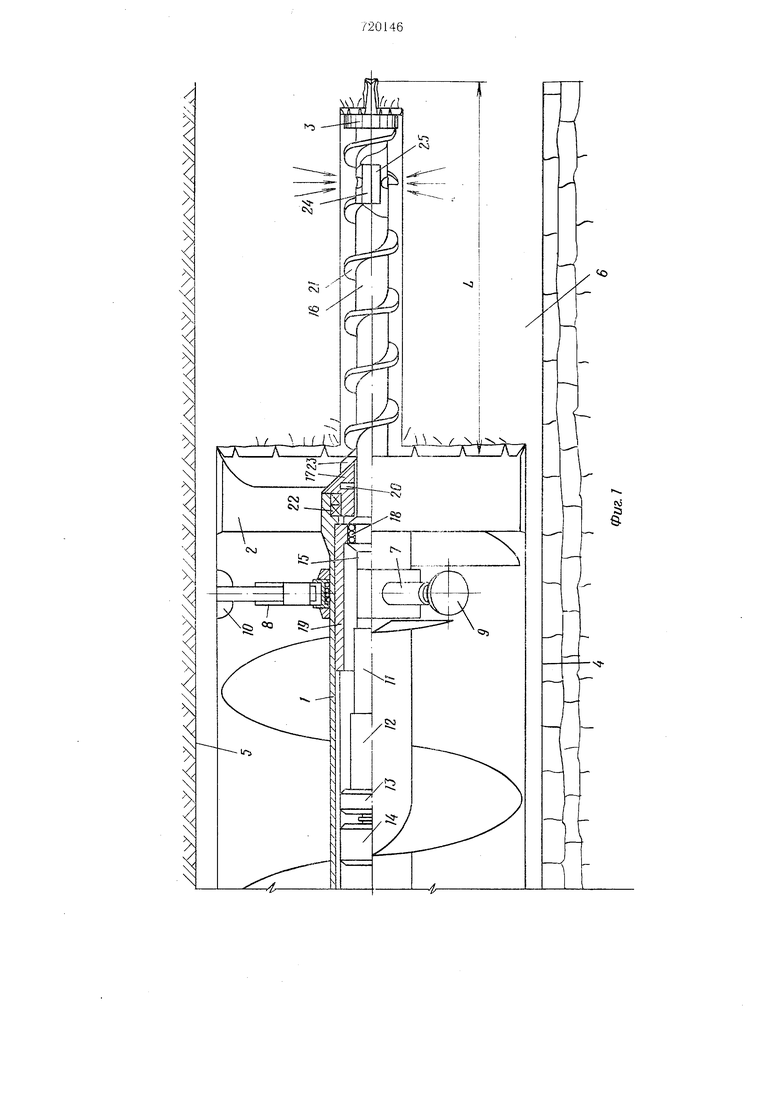
На фиг. i изображена принципиальноконструктивная схема управляемого исполнительного органа; на фиг. 2 - электроннопреобразующий блок системы управления движения исполнительного органа.
Исполнительный орган содержит буровой став 1, на конце которого жестко закреплен выемочный рабочий орган 2 с пилот-буром 3, и механизм управления положением
выемочного рабочего органа 2 относительно почвы 4 и кровли 5 пласта угля 6. Этот механизм выполнен в виде гидроцилиндров 7 и 8, снабженных опорными пятами 9 и 10. Гидроцилиндры 7 и 8 предназначены для управления положением рабочего органа 2 относительно почвы 4 и кровли 5.
Исполнительный орган также снабжен соосно установленным с буровым ставом 1 механизмом выдвижения пилот-бура 3 относительно рабочего органа 2, выполненным в виде телескопического гидроцилиндра 11. Конец 12- гидроцилиндра 11 жестко скреплен с редуктором 13 приводного двигателя 14, а конец 15 - с пилот-буром 3. На корпусе 16 пилот-бура установлены вращающаяся обойма 17 и радиально-упорный подшип:кик 18, несущий соосно установленный с телескопическим гидроцилиндром 11 внутри бурового става 1 ползун 19.
Обойма 17 имеет винтовой паз 20 для прохода витка 21 корпуса 16 пилот-бура 3 и подц ипник 22, внешний корпус которого скреплен с буровым ставом 1 и разгрузчиком 23. Последний очищает виток 21 от штыба, поступающего от пилот-бура 3, и препятствует попаданию штыба внутрь исполнительного органа.
Датчики 24 и 25 скрытой границы «порода-уголь, контролирующие естественную радиоактивность угля и вмещающи;; пород, установлены в корпусе пилот-бура 3. В слу.чае необходимости могут быть установлены дополнительные датчики, контролирующие естественную радиоактивность угля межскважииных целиков.
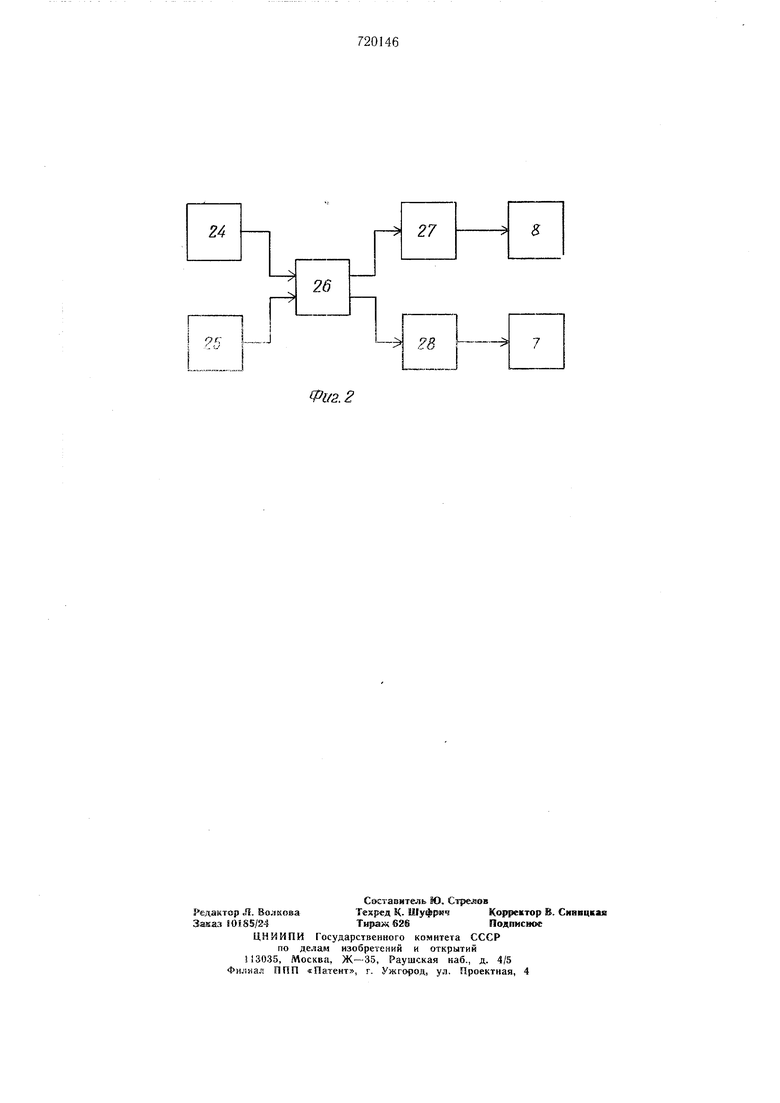
Датчик 24 «уголь-порода, ориентированный относительно кровли 5, и датчик 25 «порода-уголь, ориентированный относительно почвы 4, через электронно-преобразующий блок 26 (фиг. 2), электрогидропреобразователи 27 и 28 связаны соответственно с гидроцилиндрами 8 и 7 управления выемочного рабочего органа 2 относительно кровли 5 и почвы 4.
Исполнительный орган работает следующим образом.
Перед началом работы исполнит(гльный орган ориентируют по заданному направлению бурения и при сближенных выемочном рабочем органе 2 (фиг. 1) и пилот-буре 3 сообщают одновременно вращательное и поступательное движение буровому ставу и пилот-буру. При этом пилот-бур забуривается со скоростью значительно большей, чем скорость бурения выемочным рабочим органом 2. После забуривания пилот-бура на глубину, равную максимальному ходу штоков гидроцилиндра 11, его вращательное и поступательное движения автоматически прекращаются. Под действием противовеса (не показан) пилот-бур стабилизируется в пространстве, т. е. датчик 24 ориентируется относительно кровли 5, а датчик 25 - относительно почвы 4. В неподвижном состоянии датчики 24 и 25 измеряют естественную радиоактивность верхней и нижней пачек угля и подают сигналы в электронно-преобразуюпдий блок 26. При значениях выходных сигналов, соответствующих заданной
траектории бурения, т. е. при отсутствии отклонений от заданного курса, преобразователь 27 не срабатывает. При сближении выемочного рабочего органа 2 с коронкой пилот-бура 3 последний автоматически включается и с повышенной по сравнению с выемочным рабочим органом 2 скоростью снова забуривается на глубину L В случае, если сигналы с какого-либо из датчиков 24 и 25 покажут на вы.ходе блока 26 отклонение от заданного курса, то автоматически включается гидроцилиндр 11 на возврат пилот-бура 3 в став 1. Одновременно гидроцилиндры 7 и 8 получают сигналы на отжим выемо-п ого рабочего органа 2 опорными пятами в сторону, противоположную направлению отклонения пилот-бура. После вывода выемочного рабочего органа на заданную траекторию нилот-буру автоматически сооби1ается вращательное и поступательное движение, и операции по управлению испол1- ительны. органом повторяются. Таким образом, исг1рав;1ение траектории движения выемочного рабочего органа выполняется до момента вхождения его резцов в контакт с вмещающими пласт породами.
Формула изобретения
. Управляемый исполнителы-:ый орган шнекобуровой .машины, включаюш,ий вые.мочный рабочий орган, пилот-бур с коргг/сом и рабочим органом, буровой став, механизм
отклонения выемочного рабочего органа относительно почвы и кровли пласта, двигатель вращения с редуктором, датчики границы «порода-уголь, размещенные в корпусе бура, и электронно-преобразующий блок, отg личающийся тем. что, с целью осуществления опережающего контроля пространственного положения исполнительного органа и повышения точности направленного бурения, пилот-бур установлен Бпутрн бурового става с возмож1;остью пере.мешеняя в осевом направлснпи относительно эпого става и снабжен индивидуальным механизмом вращения и осевой подачи.
2. Управляемый исполнительный орган по п. 1, отличающийся тем, что механизм
„ вращения и осевой подачи в зшолнен из телескопического гидроцилиндра, соединенного одним концом с гшлот-буром, а другим - с редуктором двигателя вращения. Источники информации, принятые во вни.мание при экспертизе
1. Авторское свидетельство СССР по заявке № 1968717/03, кл. Е- 21 С 9/00, 1973. 2. Патент СССР по заявке Л 2067627/03, кл. Е 21 С 35/24, 1974 (прототип).
«о
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган одношпиндельной шнекобуровой машины | 1969 |
|
SU582386A1 |
| Выемочная машина | 1973 |
|
SU840346A1 |
| Шнекобуровая машина | 1975 |
|
SU579411A1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ НИШ В ДЛИННЫХ КОМПЛЕКСНО-МЕХАНИЗИРОВАННЫХ ОЧИСТНЫХ ЗАБОЯХ | 2011 |
|
RU2472937C1 |
| Рабочий орган шнекобуровой машины | 1979 |
|
SU857463A1 |
| Способ выемки угля при проведении выработок на выбросоопасных пластах | 1987 |
|
SU1537833A1 |
| Способ проходки горной выработки и устройство для его осуществления | 2018 |
|
RU2689455C1 |
| Устройство для контроля направления бурения скважин | 1977 |
|
SU750049A1 |
| Устройство для выемки полезного ископаемого | 1977 |
|
SU681180A1 |
| Устройство для бурения скважин | 1978 |
|
SU744128A1 |