(54) ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ
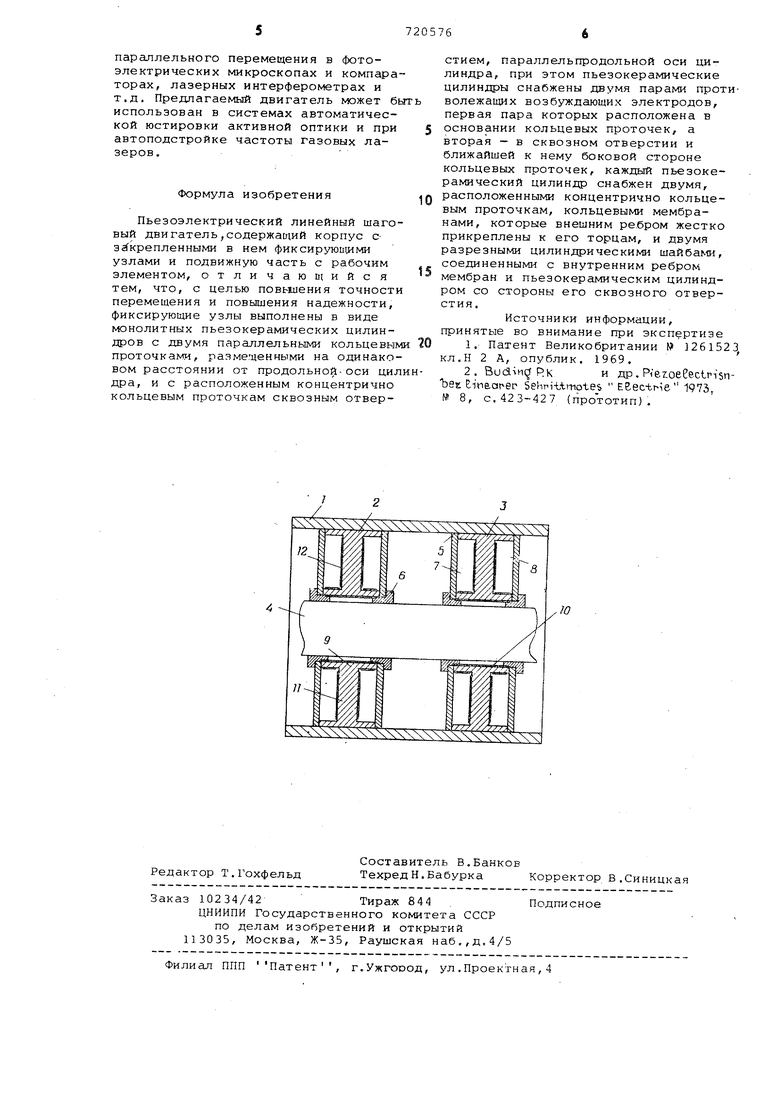
ДВИГАТЕЛЬ ) гчьезокерамическим цилиндром со стороны его сквозного отверстия. На чертеже изображен предложенный 1Вигатель в разрезе. Он содержит цилиндрический корпус 1, в котором расположены фиксирующие узльл 2 и 3, тзыполненные s виде монолитных пьезокер.амических цилиндров переменного сечения со сквозными осевыми отверcTHHMj-i к частичной метализацией поверхностей, подвижная часть 4 с рабочим элементом (На чертеже не показан), кольцевые мембранн 5 (по две на каждый фиксируюуий узел), жестко закрепленные х корпусу 1 и торцам пьазокерагумческих цилиндров фикси-руюших узлов 2 и 3, и четыре разреакые цилиндрические шайбы 6 (по две на каждый сЬиксируюищй узел) , положение которых фиксируется на пер ферийных участках внутренних поверх ностей пьезокерамических цилинд1:)о:а. пьезокерамический цнлинд э фиксируюящх узлов 2 и 3 имеет две кольцевых проточки 7 и 8, выполненЯые симметрично на противоположных его торцах ка одинаковом расстоянии от его оси врашения, и образующее два тонкостенных цилиндра 9, на внутреннюю и верхнюю поверхности ко рых нанесены возбуждающие элект::юды для осуществления отработки перемеш НИИ подвижной части,и один толстост йый цилиндр 11, на торцовые поверхности которого нанесены возбужгаюши э.-ьектроды 12 .дгш осуществления фиксации положения подвижной части, причем электроды 10 и 12 изолирэваи остальных частей пьезокерамигееKCij.O- цилиндра и д.оу1 от щзуга. На чертеже блок управления и соедините нь:й проводники не показаны. Работает двигатель следующим образом. В исходном состоянии производитс фиксация положения подвижной части за. счет явления обратного пьезоэфФе ТВ путем подачи на металлизированны торцовые поверхности, т.е. электроды 12 фиксйрующего узла 3, электрическо напряжения такой полярности, чтобы произоишо увеличение размеров толст стенного цилиндра 11 в радиальном направлении, что вызовет зажатие ра резной шайбы 6 и . соответственно фик цию положения, В первом рабочем так те; осуществляется смещение фиксирую щего узла 2 о-тносительно подвижной части 4 в осевом направлении путем подачи на металлизированные внутрен ние и внешние поверхности тонкостен ных цилиндров 9 фиксирующего узла 2 электрического напряжения Б такой полярности, чтобы один из тонкостен ных цилиндров 9 (например, верхний) увеличил свои размеры в осевом направлении, а другой - уменьшил их,. Так как кольцевые мембраны 5 жестко закреплены на торцах пьезокерамичес кого цилиндра узла .фиксации 2, то центральные части мембран сместятся в осевом направлении. Во втором рабочем такте производится фиксация положения фиксирующего узла 2 в деформированном состоянии путем подачи на металлизированные торцовые поверхности толстостенного цилиндра 11 электрического напряжения соответствующей полярности. В третьем рабочем такте осуществляется устранение фиксации положения фиксирующего узла 3 путем подачи на металлизированные торцовые поверхности толстостенного цилиндра 11 фиксирующего узла 3 электрического напряжения такой полярности, чтобы произошло уменьшение размеров толстостенного цилиндра в радиальном направлении. Одновременно с этим на металлизированные поверхности тонкостенных цилиндров 9 фиксирующего узла 3 подается напряжение в такой полярности, чтобы верхний тонкостенный цилиндр 9 увеличил свои размеры в осевом направлении, а нижний уменьшил их. Этим достигается подготовка фиксирующего узла 3 к следую1чег ту рабочему такту. В этом же такте после устранения фиксации положения фиксиPiiomero узла 3 относительно подвижной части 4 осуществляется рабочее luaroBoe перемещение подвижной части 4 за счет упругих деформаций мембран. В четвертом рабочем такте осуществляется фиксация нового положения подвижной части относительно неподвижной при помощи фиксирующего узла 3 и с некоторой за держкой времени устраняется фиксация подвижной части 4 относительно Фиксирующего узла 2 и очередная деформаti.HH мембран 5 фиксируюьчего узла 2 подобно тому, как это производитгось Е первом рабочем такте. Применение кольцевых мембран, раоотаюьтих в области упругих деформаций, позволяет увеличить точность плоскопараллельногО перемещения подзижной части, а нггличие иазрезных цилиндрических шайб и использования двукратного изменения размеров толстостенных цилиндров 11 в радиальном направлении относительно исходного состояния устраняют возможность значительных перекосов и заклинивания подвижной и неподвижной частей, что значительно повыьчает надежность рабОТЫ. Кроме того, предлагаемая конструкция двигателя технологична в исполнении, так как ие требуется жетских допусков в отношении размеров узлов, входяидих в двигатель. Указанные преимущества особенно важны при использовании двигателя в качестве привода системы автоматического сканирования фурье-спектрометров, а также в метрологической практике для осуществления плоскопараллельного перемещения в фотоэлектрических микроскопах и компара торах, лазерных интерферометрах и т.д. Предлагаемый двигатель может бы использован в системах автоматической юстировки активной оптики и при автоподстройке частоты газовых лазеров . Формула изобретения Пьезоэлектрический линейный шаго вый двигатель,содержащий корпус с3открепленными в нем фиксирующими узлами и подвижную часть с рабочим элементом, отличаю П1ийся тем, что, с целью повыиения точности перемещения и повышения надежности, фиксирующие узлы выполнены в виде монолитных пьезокерамических цилиндров с двумя параллельными кольцевым проточками, размещенными на одинако вом расстоянии от продольной-оси цил дра, и с расположенным концентрично кольцевым проточкам сквозным отверстием, параллельпродольной оси цилиндра, при этом пьезокерамические цилиндры снабжены двумя парами противолежащих возбуждающих электродов, первая пара которых расположена в основании кольцевых проточек, а вторая - в сквозном отверстии и ближайшей к нему боковой стороне кольцевых проточек, каждый пьезокерамический цилиндр снабжен двумя, расположенными концентрично кольцевым проточкам, кольцевыми мембранами, которые внешним ребром жестко прикреплены к его торцам, и двумя разрезными цилиндрическими шайбами, соединенными с внутренним ребром мембран и пьезокерамическим цилиндром со стороны его сквозного отверстия. Источники информации, принятые во внимание при экспертизе 1.Патент Великобритании № 1261523 кл.Н 2 А, опублик. 1969. 2.Виса-1и( RKи др. PiezoeCectrisnЪек Einaat er SelipRtmptes ERectrie 1973, № 8, с.423-427 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Волновой электродвигатель Абрамова В.А. | 2016 |
|
RU2667214C1 |
| Шпоночное соединение для тонкостенных деталей И.Г.Мухина | 1984 |
|
SU1281773A1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ | 2002 |
|
RU2225304C1 |
| Динамометрическая шпиндельная опора | 1991 |
|
SU1803272A1 |
| СПОСОБ ПРОИЗВОДСТВА ИЗДЕЛИЙ ОБРАТНЫМ ПРЕССОВАНИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1987 |
|
RU2076007C1 |
| Устройство для резки труб | 1985 |
|
SU1328087A1 |
| НАСОСНЫЙ АГРЕГАТ | 2004 |
|
RU2262005C1 |
| АВТОМАТИЧЕСКИЙ СТОЯНОЧНЫЙ ТОРМОЗ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА И УЗЕЛ ЕГО ОТКЛЮЧЕНИЯ | 2020 |
|
RU2733839C1 |
| РАЗДВИЖНОЕ СОПЛО РАКЕТНОГО ДВИГАТЕЛЯ | 2004 |
|
RU2276280C1 |
| Устройство для запрессовки втулок в корпусную деталь | 1987 |
|
SU1449308A1 |
/
.ХX ,Х X ЧХ XXXXX
Ч Х.
t.
