1
Изобретение относится к области неразрушающего контроля материалов и может быть использовано для определения коордигют источников сигналов акустической эмиссии.
Известен способ определения координат источников сигналов, применяемый в радионавигации, заключающийся в определении временных задержек принимаемы сигналов и решении системы уравнений 2-х гипербол, соответствующих 2-м време1гаым задержкам |3-1 Недостатком этохх способа является сложность вычнслеиия кос динат источника сигнала.
Наиболее близким по технической сущности к данному изобретению является способ определения координат источника . сигналов акустической эмиссии, заключающийся в том, что при помощи группы преобразователей принимают сигналы акустической эмиссии и вычисляют триангуляционные параметры источника по измеренным р.эзностям времени приема сигналов акустическЫ эмиссии f2J.
Недостатком этого способа является недостаточное быстродействие вычисления координат источника акустической эмиссии, связанное со сложностью алгоритма расчета координат.
Цель изобретения - повышение быст родействия.
Указанная цель достигается тем, что используют две группы преобразователей, каждая из которых включает три преобразователя, располагают преобразователи первый и второй, второй и третий, четвертый и пятый, пятый и шестой на равном расстоянии, преобразователи второй, третий, четвертый и пятый - на одной прямой, а первый и шестой на -перпендикулярах, восста ювленных в точках расположения второго и пятого преобразователей от вышеуказанной 1фямой, и определяют координаты источника по следующим
0 соотношениям:
tr, -с
X - ± -Ъ
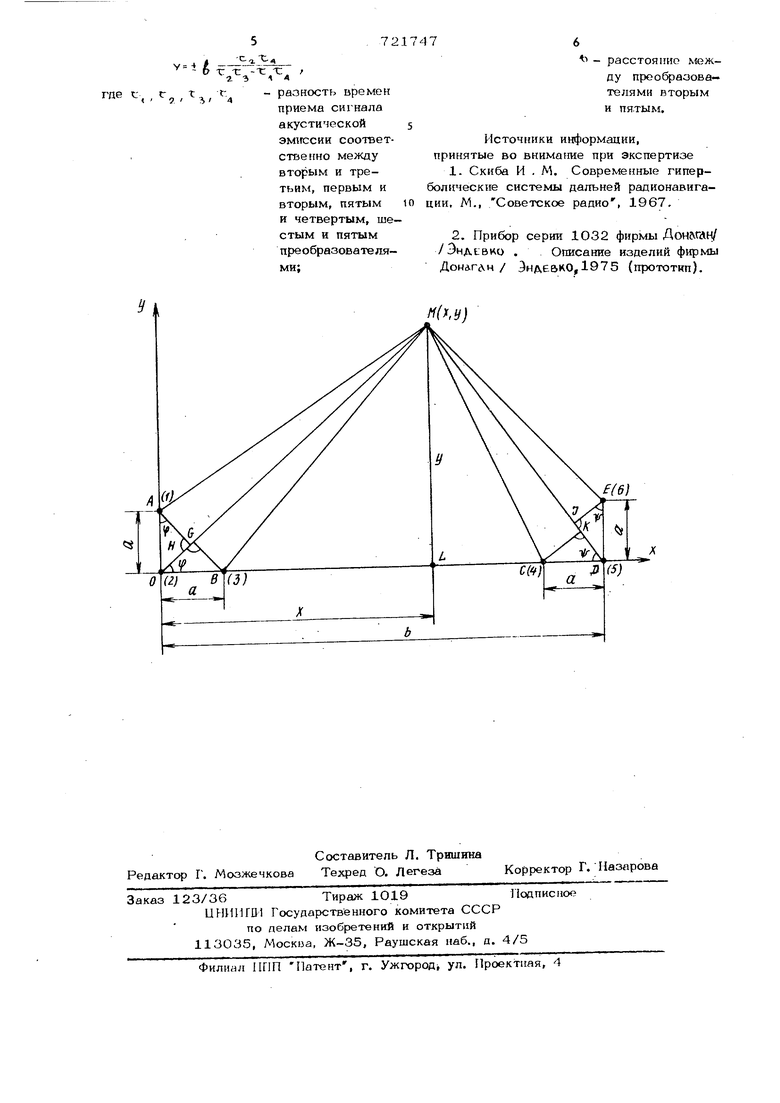
, -. iTie д, Q ,, - разности времен приема сигнала акустической эмиссии соотиотствошю методу Е.торым и третьим, первым и вторым, пятым и четвертым, шестым и пятым преобразователями;Ь - расстояние между преобразователями вторым и пятым. На чертеже показана схема пространс венного расположения преобразователей. Преобразователи 1, 2, 3 и 4, 5, 6 помещены соответственно в точки А, О, и С, Г) Е, Точка М - источник сигнала акустической эмиссии. Расстояние О Р б за установки группы приемных пъезопреобразователей) обозначено t . Точка Оначало декартовой сис-темы координат ХОУ. Угол между базой to и отрезком прямой, соединяющей начало координат с точкой расположения определенного источника сигнала М обозначено . Угол между базой Ъ и отрезком D М обозначено у , X и У - координаты источни ков сигналов М в выбранной системе координат. Способ заключается в следующем. Предполагаем, что в случае удаленны источников сигнала фронт волны плоский (а « МА). Тогда отрезок 00 равен разности произведений скорости распрост ранения фронта волны на время распрост ранения фронта полны до приемников О и В, иначе OG ОМ - ВМ а - разность времен хода сиг нала до преобразователей 2 и 3; С - скорость распространения фронта волны. Аналогично: ОН S ОМ - AM - Ст,, , Где -с - разность времен хода си нала до .преобразователей 1 и 2, р Мр - МС -Сгз ; 3D ME: Ct:, где с .. - разность времен хода до преобразователей -1 и 5; t - р.чаность времен хопя д приемников 5 к 6. 4 Из треугольников OfJ.J, ОЛИ, C.Df, J Гг. путем несложных тригонометримг.ских расчетов ПОЛУЧИМ i . Кроме того, из AOML и1)МЬ tgcf-:X. tgn-. Отсюда находятся выражения для координат источника сигнала (точка М) t.-c . Полученный алгоритм представляет собой фу1«цию, позволяющую без применения универсального компьютера разработать аппаратуру для определения координат источников акустической эмиссии. В результате реализации данного алгоритма быстродействие системы для определения координат источников сигналов акустической эмиссии повышается не менее чем в 2 раза. Формула изобретения Способ определения координат источника сигналов акустической эмиссии, заключающийся в том, что при помаци группы преобразователей принимают сигналы акустической эмиссии и вычисляк)т триангуляционные параметры источника по измеренным разностям времени приема сигналов а:кустической эмиссии, о т л и ч а ю щ и и с я тем, что, с целью повышения быстродействия, используют две группы преобразователей, каждая из которых включает три преобразователя, располагают преобразователи первый и второй, второй и третий, четвертый и пятый, пятый и шестой на равном расстоянии, преобразователи второй, третий, четвертый и пятый - на одной прямой, а первый и шестой - на перпевдикулярах, восстановленных в точках расположения второго и Пятого преобразователей от вышеуказанной прямой, и определяют координаты источника из следующих соотношений:., 4 « .--. -.S- разность времен приема сигнала акустической ЭМ1ГССИИ соответ ствеино между вторым и третьим, первым и вторым, пятым и четвертым, ше стым и пятым преобразователями;
Ml), У) - расстояние между преобразователями вторым и пятым, Источники информации, ринятые во внимагше при экспертизе 1.Скиба И . М. Современные гиперлические системы дальней радионавигаи, М., Советское радио , 1967. 2.Прибор серки 1032 фирмы Додаглн/ /Эндьвко . Описание изделий фирмы Донд-глн / ЭиАе&ко,1975 (прототип).