Изобретение относится к неразрушающему контролю и может быть использовано для определения координат дефектов в металлических конструкциях при акустико-эмиссионном контроле.
Известен способ определения координат источников акустической эмиссии, заключающийся в том, что принимают сигналы акустической эмиссии n преобразователями, определяют время прихода сигналов на каждый преобразователь, энергию сигналов, принятых каждым преобразователем, и по ним определяют соответствующие разности расстояний от источника до каждой пары преобразователей, по которым судят о координатах источников акустической эмиссии. Кроме того, определяют углы прихода сигналов на каждый преобразователь относительно выбранной системы координат, дополнительно определяют разности расстояний от источника до каждой пары преобразователей по углам прихода, по разностям расстояний, определенных по трем указанным параметрам, определяют их средневзвешенные значения, а координаты источников акустической эмиссии определяют с учетом этих значений ((авт. свид. №1539652, МКИ 5 G01N 29/04, приоритет от 5.01.88 г., БИ №4, 1990 г., принятый за аналог).
Недостатком способа является следующее обстоятельство. Способ предусматривает использование трех методов локации, при которых определяют разности расстояний от источника акустической эмиссии до приемных преобразователей на основе измерения разности времен прихода, энергий и углов прихода сигналов акустической эмиссии. Однако совместное использование трех простых способов локации не приводит к повышению точности в определении координат источников акустической эмиссии, так как каждый из них характеризуется большими погрешностями.
Известна многофункциональная акустико-эмиссионная система диагностики конструкций, включающая акустические приемники-преобразователи, последовательно соединенные с быстродействующими аналого-цифровыми преобразователями многоканального модуля регистрации и предварительной обработки акустических сигналов с процессором, связанного с модулем анализа акустических сигналов с процессором. Кроме того, дополнена, по крайней мере, одним многоканальным модулем регистрации и предварительной обработки акустических сигналов с процессором и, по крайней мере, одним модулем анализа акустических сигналов с процессором, причем каждый многоканальный модуль регистрации и предварительной обработки акустических сигналов имеет связанное с быстродействующими аналого-цифровыми преобразователями устройство синхронизации их работы, процессоры многоканальных модулей регистрации и предварительной обработки акустических сигналов и процессоры модулей анализа акустических сигналов снабжены сетевой операционной системой реального времени, при этом все процессоры посредством соединенных с ними сетевых карт связаны между собой, совместно образуя многопроцессорную локально-вычислительную сеть распределенной параллельной обработки акустических сигналов под управлением операционной системы реального времени (пат. РФ №2141655, МКИ 6, G01N 29/14, приоритет от 24.11.1998 г., БИ №32, 1999, принятый за аналог).
Недостатком данной системы является то, что каналы внутри модуля регистрации и предварительной обработки сигналов не являются функционально независимыми. Кроме того, в модулях регистрации не производится расчет времен прихода акустических сигналов по их оцифрованной форме и нет цифровой фильтрации шумовых помех. Фильтруются только импульсные помехи с определенными параметрами, в результате чего достигается невысокая точность определения координат дефекта. Параллельная работа процессоров в многопроцессорной сети требует сложного программного обеспечения и не позволяет полностью загрузить вычислительные мощности каждого процессора.
Наиболее близким к предлагаемому решению является способ определения координат источников акустической эмиссии, заключающийся в том, что на изделии размещают группу преобразователей, регистрируют разности времен прихода сигналов акустической эмиссии, образованных симметричной волной Лэмба, и рассчитывают координаты по разности времен прихода на приемные преобразователи и значению скорости распространения симметричных волн Лэмба. Кроме того, выбирают рабочий частотный диапазон для приема сигналов из условия
 ,
,
где С - скорость распространения поперечной волны; f1, f2 - граничные частоты диапазона; h - толщина стенки конструкции, определяют групповые скорости нулевых симметричной U1 и антисимметричной U2 волн Лэмба на средней частоте рабочего диапазона и учитывают их при расчете координат источников акустической эмиссии (авт. свид. №1730573, МКИ 5, G01N 29/14, приоритет от 27.10.89 г., БИ №16, 1992 г., принятый за прототип).
К числу основных недостатков способа следует отметить:
- ограниченная область применения, поскольку данный способ применим только для тонкостенных конструкций;
- при работе на реальной конструкции граничные частоты оказываются близкими по величине, так как определяются геометрией объекта контроля. Следовательно, хорошую фильтрацию симметричной моды от антисимметричной осуществить практически очень сложно;
- при крупногабаритных объектах контроля наблюдается большое затухание симметричной моды, в результате чего сложно осуществить регистрацию начала сигнала акустической эмиссии, так как уровень сигнала небольшой и теряется в шумах. Поскольку начало сигнала определить сложно, то это обстоятельство неизбежно вызывает большую погрешность в определении времени прихода сигнала акустической эмиссии, а следовательно, и разности времен прихода сигнала на преобразователи, образующие пьезоантенну. Известно, что координаты источника сигналов акустической эмиссии находятся по разности времен его прихода на акустические преобразователи, образующие пьезоантенну. Следовательно, поскольку разность времен прихода сигналов акустической эмиссии определяется с большой погрешностью, то высокую точность в определении координат дефекта данным способом получить практически невозможно (Диагностика объектов транспорта методом акустической эмиссии. / Серьезнов А.Н., Степанова Л.Н., Муравьев В.В. и др. / Под ред. Л.Н.Степановой, В.В.Муравьева - М.: Машиностроение, 2004, с.69-81).
Таким образом, данный способ определения координат дефектов характеризуется низкой точностью в определении координат дефектов. Кроме того, его область применения ограничивается тонкостенными конструкциями.
Наиболее близким по технической сущности является многоканальное акустико-эмиссионное устройство для контроля изделий, состоящее из 1…n блоков, каждый из которых содержит четыре измерительных канала, состоящих из последовательно соединенных акустического преобразователя, предварительного усилителя, фильтра, пикового детектора, выход которого соединен с инвертирующим входом компаратора, а также содержит цифроаналоговый преобразователь, выход которого подключен к неинвертирующему входу компаратора, а также коммутатор каналов, основной усилитель, аналого-цифровой преобразователь, оперативное запоминающее устройство и таймер. Кроме того, в устройстве последовательно соединены коммутатор каналов, основной усилитель, аналого-цифровой преобразователь, оперативное запоминающее устройство, выход которого соединен с первым входом устройства сопряжения. Причем четыре входа коммутатора каналов соединены с выходами фильтров каналов и входами пиковых детекторов соответствующих каналов, а входы цифроаналоговых преобразователей четырех каналов блока объединены и соединены с первым выходом устройства сопряжения, выходы компараторов каждого канала подключены ко входам таймера, выход которого соединен со вторым входом оперативного запоминающего устройства, второй выход устройства сопряжения соединен с третьим входом таймера, а третий выход устройства сопряжения соединен с шиной компьютера (Патент РФ №2150698, МПК 7, G01N 29/14, 29/04, приоритет от 25.11.97 г., БИ №16, 2000 г., принятый за прототип).
К числу основных недостатков данного устройства относятся:
- низкое быстродействие, обусловленное невысоким быстродействием коммутирующих устройств в блоках. Низкое быстродействие является причиной появления погрешностей при измерении амплитуды, времени прихода, спектра сигналов акустической эмиссии. Это приводит не только к понижению быстродействия всего устройства, но при этом резко повышаются погрешности локализации и уменьшается объем передаваемой информации;
- взаимное влияние каналов, вызванное прохождением паразитных сигналов через коммутирующие устройства на соседний канал;
- невозможность определения в реальном масштабе времени спектральных характеристик сигналов акустической эмиссии, а следовательно, и типа дефекта, так как вся обработка информации осуществляется в одном центральном процессоре.
При разработке заявляемого способа определения координат источников сигналов акустической эмиссии и устройства для его осуществления была поставлена задача повышения точности определения координат дефектов по сигналам акустической эмиссии и расширение области использования.
Поставленная задача решается за счет того, что в предлагаемом способе определения координат источников сигналов акустической эмиссии на металлической конструкции, включающем установку n акустических преобразователей на конструкции, определение скорости распространения сигналов акустической эмиссии на конструкции и разности их времен прихода на акустические преобразователи, вычисление по ним координат источника сигналов акустической эмиссии. Кроме того, в зону, ограниченную пьезоантенной, устанавливается акустический преобразователь имитатора, а расчет времен прихода сигналов акустической эмиссии на акустические преобразователи, составляющие пьезоантенну, производится по отфильтрованным с использованием вейвлет-фильтрации сигналам, рассчитывается погрешность определения координат акустического преобразователя имитатора, подбираются пороговые значения по амплитуде коэффициентов для вейвлет-фильтрации, при которых погрешность определения координат акустического преобразователя имитатора принимает минимальное значение, изменяется частотный диапазон вейвлет-фильтрации до тех пор, пока погрешность определения координат акустического преобразователя имитатора не примет минимальное значение, после чего металлическая конструкция нагружается, а по полученным параметрам вейвлет-фильтрации производится фильтрация сигналов акустической эмиссии и определение их координат.
Поставленная задача решается также за счет того, что многоканальное акустико-эмиссионное устройство для определения координат источников сигналов акустической эмиссии на металлической конструкции, состоящее из 1…n блоков, каждый из которых содержит четыре канала, состоящих из последовательно соединенных акустического преобразователя, предварительного усилителя, фильтра, основного усилителя, аналого-цифрового преобразователя, а также содержит цифроаналоговый преобразователь, компаратор, оперативное запоминающее устройство, шину компьютера. Кроме того, согласно изобретению, выход основного усилителя каждого канала соединен с неинвертирующим входом компаратора, инвертирующий вход которого соединен с выходом цифроаналогового преобразователя, а входы цифроаналоговых преобразователей всех каналов блока объединены и соединены с первым выходом таймера-счетчика, а выходы компараторов каждого канала блока соединены соответственно с первым, вторым, третьим и четвертым входами таймера-счетчика, а четыре выхода таймера-счетчика соединены с первыми входами оперативных запоминающих устройств каждого канала блока, выходы аналого-цифровых преобразователей каждого канала блока шиной соединены со вторыми входами оперативного запоминающего устройства соответствующего канала, выходы которых соединены с сигнальным процессором в каждом канале, выходы сигнальных процессоров двунаправленной шиной соединены с 1…4 входами цифрового мультиплексора, пятый вход которого двунаправленной шиной соединен с пятым входом таймера-счетчика, а выход цифрового мультиплексора двунаправленной шиной соединен с микропроцессором блока, первый выход которого соединен со входом генератора калибровочных импульсов, выход которого соединен с акустическим преобразователем имитатора, второй выход микропроцессора блока двунаправленной шиной соединен с шиной компьютера, которая, в свою очередь, соединена с центральным процессором компьютера.
Предлагаемое устройство по сравнению с существующими акустико-эмиссионными устройствами (Диагностика объектов транспорта методом акустической эмиссии. / Серьезнов А.Н., Степанова Л.Н., Муравьев В.В. и др. - / Под ред. Л.Н.Степановой, В.В.Муравьева - М.: Машиностроение, 2004, с.24-35) обладает высоким быстродействием, так как в каждом канале блока имеется сигнальный процессор, рассчитывающий параметры сигналов, и микропроцессор блока, оперативно рассчитывающий времена прихода сигналов акустической эмиссии по их оцифрованной форме. Кроме того, предлагаемое устройство позволяет более точно определять координаты дефектов, поскольку сигнальные процессоры каналов эффективно фильтруют акустические сигналы от шумов и помех, выделяя полезные моды сигнала. Все это позволяет более точно рассчитывать времена прихода сигналов акустической эмиссии, а следовательно, и координаты дефектов.
На фиг.1 показана схема расстановки акустических преобразователей пьезоантенны и имитатора. На фиг.2 приведена функциональная схема многоканального акустико-эмиссионного устройства для определения координат источников сигналов акустической эмиссии. На фиг.3 приведены исходный сигнал акустической эмиссии и его уровни детализации при вейвлет-разложении. На фиг.4 показано определение времени прихода сигнала акустической эмиссии по отфильтрованному сигналу при разных значениях порогового уровня  . На фиг.5 показан пример локализации сигналов акустической эмиссии. На фиг.6 изображено изменение среднеквадратического отклонения локализации сигналов акустической эмиссии при использовании вейвлет-фильтрации.
. На фиг.5 показан пример локализации сигналов акустической эмиссии. На фиг.6 изображено изменение среднеквадратического отклонения локализации сигналов акустической эмиссии при использовании вейвлет-фильтрации.
Устройство, реализующее способ определения координат источников сигналов акустической эмиссии (фиг.2), содержит:
1…n - блоки;
2 - акустический преобразователь;
3 - предварительный усилитель;
4 - полосовой фильтр;
5 - основной усилитель;
6 - аналого-цифровой преобразователь;
7 - цифроаналоговый преобразователь;
8 - компаратор;
9 - оперативное запоминающее устройство;
10 - шина стандарта PCI;
11 - программируемый таймер-счетчик;
12 - цифровой сигнальный процессор;
13 - цифровой мультиплексор;
14 - микропроцессор блока;
15 - центральный процессор компьютера;
16 - генератор калибровочных импульсов.
Практическая реализация предлагаемого устройства, реализующего способ определения координат источников сигналов акустической эмиссии, выполняется по известным схемам. Их основные характеристики изложены в следующих источниках:
1. Компараторы выполнены на микросхеме LM 311.
2. Полосовые фильтры выполнены по двухзвенной схеме активных фильтров второго порядка на операционных усилителях МС 33282 фирмы «Motorolla». Пример реализации приведен в книге (Гутников B.C. Интегральная электроника в измерительных устройствах - Л: Энергоатомиздат, 1988, с.105, рис.3.8, б).
3. Программируемый таймер-счетчик и цифровой мультиплексор выполнены на программируемой логической интегральной схеме ПЛИС фирмы «Altera» EPF10K10TC.
4. Оперативное запоминающее устройство выполнено на микросхемах статического оперативного запоминающего устройства AS7C1026.
5. Цифровой сигнальный процессор выполнен на микросхеме TMS320-LC549.
6. Цифроаналоговый преобразователь реализован на микросхеме AD7943.
7. Микропроцессор блока реализован на микросхеме AT91RM3400 фирмы «Atmel».
8. Пример реализации генератора калибровочных импульсов приведен в книге (Диагностика объектов транспорта методом акустической эмиссии. / Серьезнов А.Н., Степанова Л.Н., Муравьев В.В. и др. - / Под ред. Л.Н.Степановой, В.В.Муравьева - М.: Машиностроение, 2004, с.55-56, рис.3.6).
Информация о микросхемах находится:
1. ПЛИС фирмы ALTERA: проектирование устройств обработки сигналов - М.: ДОДЭКА, 2000, с.18.
2. Интернет-сайты фирмы Texas Instruments- www.ti.com: фирмы Motorolla- www.moto.com: фирмы Altera- www.altera.com.
3. Система схемотехнического моделирования MICRO-CAPS-M. «СОЛОН», 1997.
4. Микросхемы для аналого-цифрового преобразования и средств мультимедиа - М.: ДОДЭКА, 1996, вып.1, с.214.
Многоканальное акустико-эмиссионное устройство для определения координат источников сигналов акустической эмиссии (фиг.2) на металлической конструкции состоит из 1…n блоков, каждый из которых содержит четыре канала, состоящих из последовательно соединенных акустического преобразователя 2, предварительного усилителя 3, фильтра 4, основного усилителя 5, аналого-цифрового преобразователя 6, а также содержит цифроаналоговый преобразователь 7, компаратор 8, оперативное запоминающее устройство 9, шину компьютера 10. Кроме того, выход основного усилителя 5 каждого канала соединен с неинвертирующим входом компаратора 8, инвертирующий вход которого соединен с выходом цифроаналогового преобразователя 7, а входы цифроаналоговых преобразователей 7 всех каналов блока объединены и соединены с первым выходом таймера-счетчика 11, а выходы компараторов 8 каждого канала блока соединены соответственно с первым, вторым, третьим и четвертым входами таймера-счетчика 11, а четыре выхода таймера-счетчика соединены с первыми входами оперативных запоминающих устройств 9 каждого канала блока, выходы аналого-цифровых преобразователей 6 каждого канала блока шиной соединены со вторыми входами оперативного запоминающего устройства 9 соответствующего канала, выходы которых соединены с сигнальным процессором 12 в каждом канале, выходы сигнальных процессоров 12 двунаправленной шиной соединены с 1…4 входами цифрового мультиплексора 13, пятый вход которого двунаправленной шиной соединен с пятым входом таймера-счетчика 11, а выход цифрового мультиплексора 13 двунаправленной шиной соединен с микропроцессором 14 блока, первый выход которого соединен со входом генератора калибровочных импульсов 16, выход которого соединен с акустическим преобразователем 2 имитатора, второй выход микропроцессора 14 блока двунаправленной шиной соединен с шиной компьютера 10, которая, в свою очередь, соединена с центральным процессором 15 компьютера.
Предложенная система и способ работают следующим образом.
Перед началом работы центральный процессор 15 компьютера по шине 10 стандарта PCI подает команду записи времен отсечки и команду записи значений пороговых напряжений каналов микропроцессору 14 блока. При этом микропроцессор 14 блока через цифровой мультиплексор 13 записывает эти времена в программируемый таймер-счетчик 11. Времена отсечки определяют время записи измерительной информации для одного сигнала в оперативное запоминающее устройство 9. Программируемый таймер-счетчик 11 по последовательной шине записывает коды пороговых напряжений в соответствующие цифроаналоговые преобразователи 7 каналов, которые в свою очередь, выставляют пороговые уровни напряжений на инвертирующих входах компараторов 8. Затем устанавливается акустический преобразователь 2 имитатора внутри зоны контроля, ограниченной акустическими преобразователями 2, работающими в режиме приема акустических сигналов и преобразования их в электрические сигналы, центральный процессор 15 компьютера по шине 10 стандарта PCI подает команду запуска микропроцессору 14 блока на начало измерения. При этом микропроцессор 14 блока через цифровой мультиплексор 13 подает в программируемый таймер-счетчик 11 команду начала измерения и программируемый таймер-счетчик 11 разрешает запись измерительной информации в оперативное запоминающее устройство 9.
В следующий момент центральный процессор 15 компьютера по шине 10 стандарта PCI подает команду микропроцессору 14 блока на запуск генератора 16 калибровочных импульсов имитатора. Микропроцессор 14 блока формирует сигнал управления генератором 16 калибровочных импульсов. Генератор 16 калибровочных импульсов генерирует высоковольтный электрический сигнал, поступающий на вход акустического преобразователя 2 имитатора. Акустические сигналы, генерируемые акустическим преобразователем 2 имитатора, приходят на акустические преобразователи 2, работающие в режиме приема и образующие пьезоантенну, где преобразуются в электрические сигналы. Затем электрические сигналы с выхода акустических преобразователей 2 каналов усиливаются предварительными усилителями 3, проходят через полосовые фильтры 4, и усиливаются основными усилителями 5 каналов. После этого они поступают на неинвертирующие входы компараторов 8. Одновременно эти сигналы поступают на входы аналого-цифровых преобразователей 6, где происходит дискретизация аналоговых сигналов и цифровые коды с выходов аналого-цифровых преобразователей 6 записываются в оперативные запоминающие устройства 9 каналов. В случае превышения сигналом порогового уровня, формируемого цифроаналоговыми преобразователями 7 каналов, на выходах компараторов 8 формируются сигналы, запускающие счетчики времен отсечки в программируемом таймере-счетчике 11. По окончании времени отсечки программируемый таймер-счетчик 11 запрещает запись в оперативные запоминающие устройства 9.
Цифровые сигнальные процессоры 12 считывают из оперативных запоминающих устройств 9 цифровую реализацию сигнала акустической эмиссии. Сигнальные процессоры по оцифрованной форме сигналов осуществляют процедуру вейвлет-разложения с определением диапазона изменения параметра фильтрации. Центральный процессор 15 по шине 10 стандарта PCI подает команду запуска процедуры подбора параметров вейвлет-фильтрации микропроцессору 14 блока. Микропроцессор 14 блока через цифровой мультиплексор 13 записывает параметры вейвлет-фильтрации в цифровые сигнальные процессоры 12 каждого канала.
Для этого перед расчетом времен прихода производится вейвлет-фильтрация сигналов акустической эмиссии.
Запишем оцифрованную форму исходного сигнала акустической эмиссии как

где N - количество отсчетов сигнала (длина оцифровки). Перед проведением вейвлет-фильтрации задаются параметры вейвлет-разложения

где К - глубина вейвлет-разложения исходного сигнала.
Этот параметр определяется из соображений ограничения снизу полосы частот, в которой сигнал подвергается воздействию вейвлет-фильтрации. Нижняя граница полосы частот ωL связана с глубиной вейвлет-разложения К соотношением
где ωd - частота дискретизации регистрируемого сигнала акустической эмиссии.
Таким образом, воздействию вейвлет-фильтрации подвергается частотный диапазон  . Кроме того, производится выбор вейвлета ψ(х).
. Кроме того, производится выбор вейвлета ψ(х).
Для повышения точности вычислений над исходным сигналом производится операция усреднения: Х→Х'. Преобразованный сигнал принимает вид

где  - среднее по оцифровке.
- среднее по оцифровке.
В результате вейвлет-разложения, проведенного по базису, порожденному вейвлет-функцией ψ(х) с использованием алгоритма Малла (Mallat) (Смоленцев Н.К. Основы теории вейвлетов. Вейвлеты в MATHLAB - Кемерово, с.100-104) быстрого вейвлет-преобразования получаем представление сигнала акустической эмиссии в виде набора коэффициентов разложения

где  - глубина разложения;
- глубина разложения;  , j≤K - детализирующие коэффициенты уровня разложения j; N(j) - длина вектора коэффициентов диадного вейвлет-разложения уровня j;
, j≤K - детализирующие коэффициенты уровня разложения j; N(j) - длина вектора коэффициентов диадного вейвлет-разложения уровня j;  - масштабирующие коэффициенты уровня разложения К.
- масштабирующие коэффициенты уровня разложения К.
Результатом быстрого вейвлет-преобразования являются К уровней детализации сигнала акустической эмиссии, соответствующие различным частотным диапазонам распространения сигнала (приведенные на фиг.3).
Операция вейвлет-фильтрации заключается в изменении набора детализирующих коэффициентов. Фильтрация проводится с использованием «временного окна» и следующего решающего правила:
где  - коэффициенты, по которым осуществляется восстановление сигнала с помощью обратного быстрого вейвлет-преобразования; εj - варьируемое пороговое значение по амплитуде коэффициентов уровня j вейвлет-разложения сигнала акустической эмиссии.
- коэффициенты, по которым осуществляется восстановление сигнала с помощью обратного быстрого вейвлет-преобразования; εj - варьируемое пороговое значение по амплитуде коэффициентов уровня j вейвлет-разложения сигнала акустической эмиссии.
Функция «временного окна», используемая в решающем правиле фильтрации, записывается в виде  ,
,
tj - параметр ширины «временного окна» на уровне разложения j. Расчет параметра ширины «временного окна» производится по формуле
где TX - ширина «временного окна» на исходном сигнале акустической эмиссии, выбираемая из соображений TX>Tнар; Тнар - параметр, характеризующий время нарастания сигнала акустической эмиссии.
Оптимальная (в смысле улучшения точности определения времени прихода сигнала) фильтрация достигается за счет варьирования величины порогового значения решающего правила фильтрации εj, зависящего от входного параметра алгоритма оптимизации фильтрации A:  , где
, где  ,
,
где mj - медиана набора модулей детализирующих коэффициентов уровня разложения j.
Использование медианы обусловлено тем, что ее оценка, в отличие от оценки среднего значения, мало чувствительна к присутствию в выборке отдельных элементов, значительно превосходящих остальные по величине. Параметр А изменяется с некоторым заранее выбранным шагом dA в диапазоне dA≤A<Amax,  ,
,  ,
,
где Mj - максимум вектора модулей коэффициентов вейвлет-разложения уровня j фильтруемого сигнала.
Значению параметра А=0 соответствует нулевой порог решающего правила фильтрации: εj=0, т.е. сигнал восстанавливается без изменений. При A>Amax восстановленный с помощью обратного быстрого вейвлет-преобразования сигнал будет тождественно равен 0. Каждому значению параметра А в диапазоне dA≤A<Amax можно с помощью обратного быстрого вейвлет-преобразования сопоставить восстановленный сигнал Y'={y'i}, 0≤i≤N-1, представляющий собой полученную с помощью вейвлет-фильтрации аппроксимацию исходного сигнала  с нулевым средним.
с нулевым средним.
Затем микропроцессор 14 блока (фиг.2) считывает из памяти цифровых сигнальных процессоров 12 цифровую реализацию отфильтрованных сигналов акустической эмиссии и рассчитывает времена прихода сигналов по полученной цифровой реализации.
По форме полученного в результате фильтрации сигнала У рассчитывается время Т' прихода сигнала акустической эмиссии на акустические преобразователи. По аналогии с временем прихода T, рассчитанным по нефильтрованному сигналу, запишем
T'=(T+δ'),
где Т - истинное время прихода сигнала; δ' - погрешность определения времени прихода по сигналу, прошедшему вейвлет-фильтрацию.
Время Т' рассчитывается как момент первого превышения сигналом Y' порогового значения :
Т'=IU'/ωd,
где ωd - частота дискретизации сигнала акустической эмиссии;  - номер отсчета первого превышения сигналом порогового уровня.
- номер отсчета первого превышения сигналом порогового уровня.
Выбираем первое превышение сигналом порогового уровня, поскольку считаем, что после фильтрации шумовая компонента в предыстории сигнала акустической эмиссии отсутствует.
Таким образом, для каждого значения варьируемого параметра алгоритма вейвлет-фильтрации А и каждого значения порога определения времени прихода
рассчитывается значение δ' - погрешность определения времени прихода по фильтрованному сигналу Y'. Величины А и являются, таким образом, управляющими параметрами алгоритма оптимизации вейвлет-фильтрации сигналов акустической эмиссии. Эти параметры можно варьировать в границах
dA≤A≤Amax,  ,
,
где dA, Amax - шаг изменения параметра алгоритма фильтрации А и его максимальное значение; dU - шаг изменения порога определения времени прихода, равный минимальному изменению амплитуды сигнала, регистрируемому измерительной системой;  - максимальное значение порога определения времени прихода сигнала, выбираемое как
- максимальное значение порога определения времени прихода сигнала, выбираемое как  ,
,
 ,
,
где σ - оценка среднеквадратичного отклонения шума по предыстории исходного сигнала акустической эмиссии; nσ - количество отсчетов для оценки шума, не превышающее числа отсчетов в предыстории (nσ<nпредыстории).
Задача минимизации погрешности определения времени прихода сигнала акустической эмиссии на акустический преобразователь: |δ|→min, - принимает, таким образом, вид  ,
,
 .
.
Значения погрешности определения времени прихода сигнала акустической эмиссии  рассчитываются на сетке (dА, dU') значений параметров. При решении задачи оптимизации необходимо учитывать, что зависимость
рассчитываются на сетке (dА, dU') значений параметров. При решении задачи оптимизации необходимо учитывать, что зависимость  имеет вид кусочно-гладкой возрастающей функции. Причины проиллюстрированы (фиг.4), отображающей начальный участок принятого сигнала акустической эмиссии. При значениях Uпор≤10, рассчитываемое время прихода сигнала акустической эмиссии меняется плавно, при значении
имеет вид кусочно-гладкой возрастающей функции. Причины проиллюстрированы (фиг.4), отображающей начальный участок принятого сигнала акустической эмиссии. При значениях Uпор≤10, рассчитываемое время прихода сигнала акустической эмиссии меняется плавно, при значении  происходит скачкообразное изменение рассчитываемого времени прихода.
происходит скачкообразное изменение рассчитываемого времени прихода.
Поскольку полученная в результате расчетов поверхность  не является гладкой, то поиск оптимальных параметров производится с помощью интегрального среднего значения, т.е. для всех точек сетки, кроме краевых, производится расчет величины
не является гладкой, то поиск оптимальных параметров производится с помощью интегрального среднего значения, т.е. для всех точек сетки, кроме краевых, производится расчет величины
Затем на сетке (dA, dU') выполняется поиск минимума Iδ(A,U)→min при дополнительном ограничении U→min, A→min. Значения переменных, удовлетворяющих этим условиям, принимаются за оптимальные величины управляющих параметров алгоритма Aопт и  .
.
Подобрав оптимальные значения параметров Аопт и для каждого из акустических преобразователей, получаем полный набор параметров для алгоритма определения координат источника сигналов акустической эмиссии с использованием вейвлет-фильтрации.
Центральный процессор 15 компьютера через шину 10 стандарта PCI считывает рассчитанные времена прихода сигналов акустической эмиссии и рассчитывает по ним координаты установленного акустического преобразователя 2 имитатора, а затем - погрешность определения координат.
Расчет положения акустического преобразователя имитатора сигналов акустической эмиссии на плоскости производится по разности времен прихода сигнала на четверку преобразователей акустической эмиссии, в совокупности образующих пьезоантенну. Обозначим координаты точек установки акустических преобразователей Р0, Р1, P2, P3, как (xi, yi), i=0..3. Предположим, что первым принявшим сигнал акустической эмиссии преобразователем является Р0. Обозначим времена прихода сигнала акустической эмиссии на соответствующие акустические преобразователи как Тi. Тогда расчет координат (х, y) положения источника сигналов акустической эмиссии проводится по величинам (Ti+δi), где δi, i=0..3 - погрешность определения времени прихода сигнала акустической эмиссии по его оцифрованной форме. Обозначим действительные координаты акустического преобразователя имитатора как (хd, yd). Тогда погрешность определения его координат по разности времен прихода запишется как

где  ,
,  .
.
Поскольку точность расчета координат (х, y) зависит от величин погрешностей δi, i=0..3, то для уменьшения погрешности Δ2 из формулы (б) необходимо решить задачу минимизации погрешности определения времени прихода сигнала акустической эмиссии: |δi|→min, i=0..3.
Используя полученные параметры вейвлет-фильтрации по амплитуде, определяемые по минимальным погрешностям локализации акустического преобразователя имитатора, центральный процессор 15 компьютера через шину 10 стандарта PCI посылает команду в микропроцессор 14 блока на запуск процедуры подбора параметров вейвлет-фильтрации по частотному диапазону. При этом цифровые сигнальные процессоры 12 каждого канала реализуют процедуру вейвлет-фильтрации, используя перебор параметров по частотному диапазону, а микропроцессор 14 блока рассчитывает времена прихода сигналов акустической эмиссии по отфильтрованной форме сигналов. Центральный процессор 15 компьютера через шину 10 стандарта PCI считывает рассчитанные времена прихода сигналов акустической эмиссии и рассчитывает по ним координаты акустического преобразователя 2 имитатора, а затем - его погрешность определения координат. По минимальному значению погрешности определения координат выбирается частотный диапазон для вейвлет-фильтрации.
После того, как будут определены параметры вейвлет-фильтрации по каждому каналу, объект контроля нагружается и центральный процессор 15 компьютера через шину 10 стандарта PCI выдает команду на начало измерения сигналов акустической эмиссии. При этом процесс приема и обработки сигналов акустической эмиссии, поступающих с нагружаемого объекта контроля, аналогичен процессу приема сигналов в акустического преобразователя 2 имитатора. В процессе фильтрации сигналов акустической эмиссии используются параметры вейвлет-фильтрации, записанные в памяти сигнальных процессоров 12 каналов блока, полученные при калибровке с использованием имитатора.
По описанной методике была проведена обработка результатов серии из 8 независимых экспериментов. Регистрировались сигналы акустической эмиссии, возбуждаемые акустическим преобразователем имитатора в металлической пластине. Зона контроля представляла собой квадрат со стороной 80 см. Акустические преобразователи, работающие в режиме приема, устанавливались в углах квадрата. Координаты левого нижнего датчика задавались как (0,0). Датчик имитатора устанавливался в точке с координатами (20 см, 20 см).
Локализация сигналов акустической эмиссии отражена на (фиг.5). По каждому из экспериментов проводился контроль точности локализации сигналов АЭ как с использованием обычного порогового метода, так и с использованием метода определения времени прихода сигналов акустической эмиссии по форме сигналов, прошедших вейвлет-фильтрацию. Для контроля точности вычислялось среднеквадратическое отклонение расчетного положения источника сигнала акустической эмиссии от действительного положения акустического преобразователя имитатора по первым десяти принятым сигналам акустической эмиссии. На фиг.6 иллюстрируется изменение значения ошибки локализации сигналов акустической эмиссии в результате применения вейвлет-фильтрации. При построении графика на фиг.6 были исключены наибольшее и наименьшее значения величины среднеквадратического отклонения. Данные фиг.6 отражают улучшение точности локализации сигналов имитатора при применении описанной выше методики. Результаты эксперимента подтверждают, что вейвлет-фильтрация сигналов акустической эмиссии приводит к улучшению точности локализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ СИГНАЛОВ АКУСТИЧЕСКОЙ ЭМИССИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2684443C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ МЕТАЛЛИЧЕСКИХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339938C1 |
| Способ акустико-эмиссионного контроля металлических объектов и устройство для его осуществления | 2020 |
|
RU2736175C1 |
| СПОСОБ АКУСТИКО-ЭМИССИОННОГО КОНТРОЛЯ КАЧЕСТВА СВАРНОГО ШВА В ПРОЦЕССЕ СВАРКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2442155C2 |
| АКУСТИКО-ЭМИССИОННЫЙ СПОСОБ ДИАГНОСТИРОВАНИЯ ИЗДЕЛИЙ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ НА ОСНОВЕ УГЛЕПЛАСТИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599327C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ МЕТАЛЛИЧЕСКИХ МОСТОВЫХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2391655C2 |
| СПОСОБ АКУСТИКО-ЭМИССИОННОГО КОНТРОЛЯ КАЧЕСТВА СВАРНОГО ШВА В ПРОЦЕССЕ СВАРКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2379677C1 |
| МНОГОКАНАЛЬНОЕ АКУСТИКО-ЭМИССИОННОЕ УСТРОЙСТВО | 2019 |
|
RU2726278C1 |
| СПОСОБ ОБНАРУЖЕНИЯ В ПРОЦЕССЕ СВАРКИ ДЕФЕКТОВ В СВАРНЫХ ШВАХ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ ПО АКУСТИЧЕСКИМ СИГНАЛАМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2424510C2 |
| СПОСОБ АКУСТИКО-ЭМИССИОННОГО КОНТРОЛЯ КАЧЕСТВА КОЛЬЦЕВОГО СВАРНОГО ШВА В ПРОЦЕССЕ МНОГОПРОХОДНОЙ СВАРКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572067C1 |
Изобретение относится к неразрушающему контролю металлических конструкций с использованием метода акустической эмиссии. Техническим результатом изобретения является повышение точности и расширение области использования. Сущность изобретения заключается в том, что в зону, ограниченную пьезоантенной, устанавливается акустический преобразователь имитатора, а расчет времен прихода сигналов акустической эмиссии на акустические преобразователи, составляющие пьезоантенну, производится по отфильтрованным с использованием вейвлет-фильтрации сигналам, рассчитывается погрешность определения координат акустического преобразователя имитатора, подбираются пороговые значения по амплитуде коэффициентов для вейвлет-фильтрации, при которых погрешность определения координат акустического преобразователя имитатора принимает минимальное значение, изменяется частотный диапазон вейвлет-фильтрации до тех пор, пока погрешность определения координат акустического преобразователя имитатора не примет минимальное значение, после чего металлическую конструкцию нагружают, а по полученным параметрам вейвлет-фильтрации производится фильтрация сигналов акустической эмиссии и определение их координат. Дополнительно предложено устройство, реализующее способ. 2 н.п. ф-лы, 6 ил.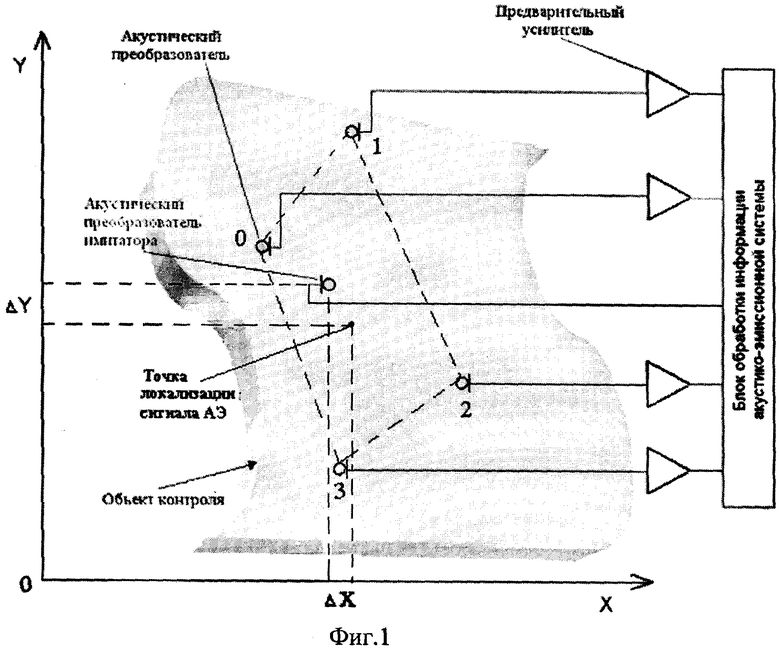
1. Способ определения координат источников сигналов акустической эмиссии на металлической конструкции, включающий установку n акустических преобразователей на конструкции, определение скорости распространения сигналов акустической эмиссии на конструкции и разности их времен прихода на акустические преобразователи, вычисление по ним координат источника сигналов акустической эмиссии, отличающийся тем, что в зону, ограниченную пьезоантенной, устанавливается акустический преобразователь имитатора, а расчет времен прихода сигналов акустической эмиссии на акустические преобразователи, составляющие пьезоантенну, производится по отфильтрованным с использованием вейвлет-фильтрации сигналам, рассчитывается погрешность определения координат акустического преобразователя имитатора, подбираются пороговые значения по амплитуде коэффициентов для вейвлет-фильтрации, при которых погрешность определения координат акустического преобразователя имитатора принимает минимальное значение, изменяется частотный диапазон вейвлет-фильтрации до тех пор, пока погрешность определения координат акустического преобразователя имитатора не примет минимальное значение, после чего металлическая конструкция нагружается, а по полученным параметрам вейвлет-фильтрации производится фильтрация сигналов акустической эмиссии и определение их координат.
2. Многоканальное акустико-эмиссионное устройство для определения координат источников сигналов акустической эмиссии на металлической конструкции, состоящее из 1…n блоков, каждый из которых содержит четыре канала, состоящих из последовательно соединенных акустического преобразователя, предварительного усилителя, фильтра, основного усилителя, аналого-цифрового преобразователя, а также содержит цифроаналоговый преобразователь, компаратор, оперативное запоминающее устройство, шину компьютера, отличающееся тем, что выход основного усилителя каждого канала соединен с неинвертирующим входом компаратора, инвертирующий вход которого соединен с выходом цифроаналогового преобразователя, а входы цифроаналоговых преобразователей всех каналов блока объединены и соединены с первым выходом таймера-счетчика, а выходы компараторов каждого канала блока соединены соответственно с первым, вторым, третьим и четвертым входами таймера-счетчика, а четыре выхода таймера-счетчика соединены с первыми входами оперативных запоминающих устройств каждого канала блока, выходы аналого-цифровых преобразователей каждого канала блока шиной соединены со вторыми входами оперативного запоминающего устройства соответствующего канала, выходы которых соединены с сигнальным процессором в каждом канале, выходы сигнальных процессоров двунаправленной шиной соединены с 1…4 входами цифрового мультиплексора, пятый вход которого двунаправленной шиной соединен с пятым входом таймера-счетчика, а выход цифрового мультиплексора двунаправленной шиной соединен с микропроцессором блока, первый выход которого соединен со входом генератора калибровочных импульсов, выход которого соединен с акустическим преобразователем имитатора, второй выход микропроцессора блока двунаправленной шиной соединен с шиной компьютера, которая, в свою очередь, соединена с центральным процессором компьютера.
| МНОГОКАНАЛЬНОЕ АКУСТИКО-ЭМИССИОННОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИЗДЕЛИЙ | 1997 |
|
RU2150698C1 |
| Устройство для определения координат источника сигнала акустической эмиссии | 1988 |
|
SU1583834A1 |
| Способ определения координат источников акустической эмиссии | 1989 |
|
SU1730573A1 |
| Устройство для определения координат источников акустической эмиссии | 1981 |
|
SU1019316A1 |
| US 3985024 А, 12.10.1976. | |||

