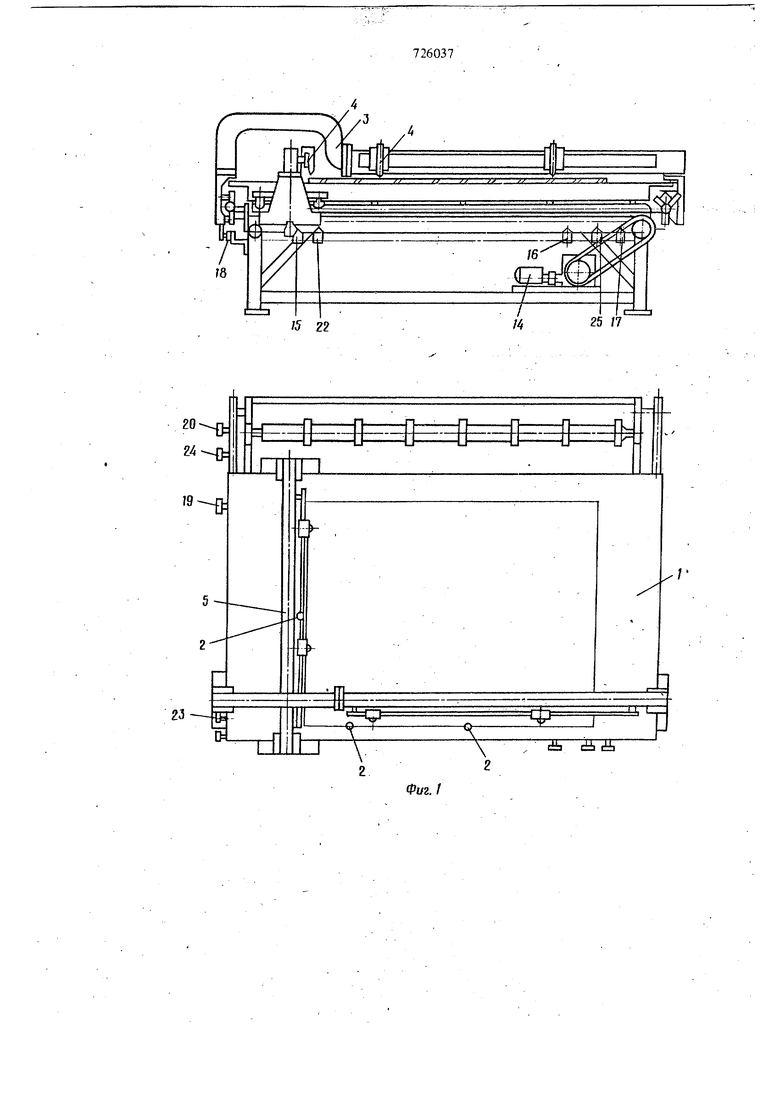
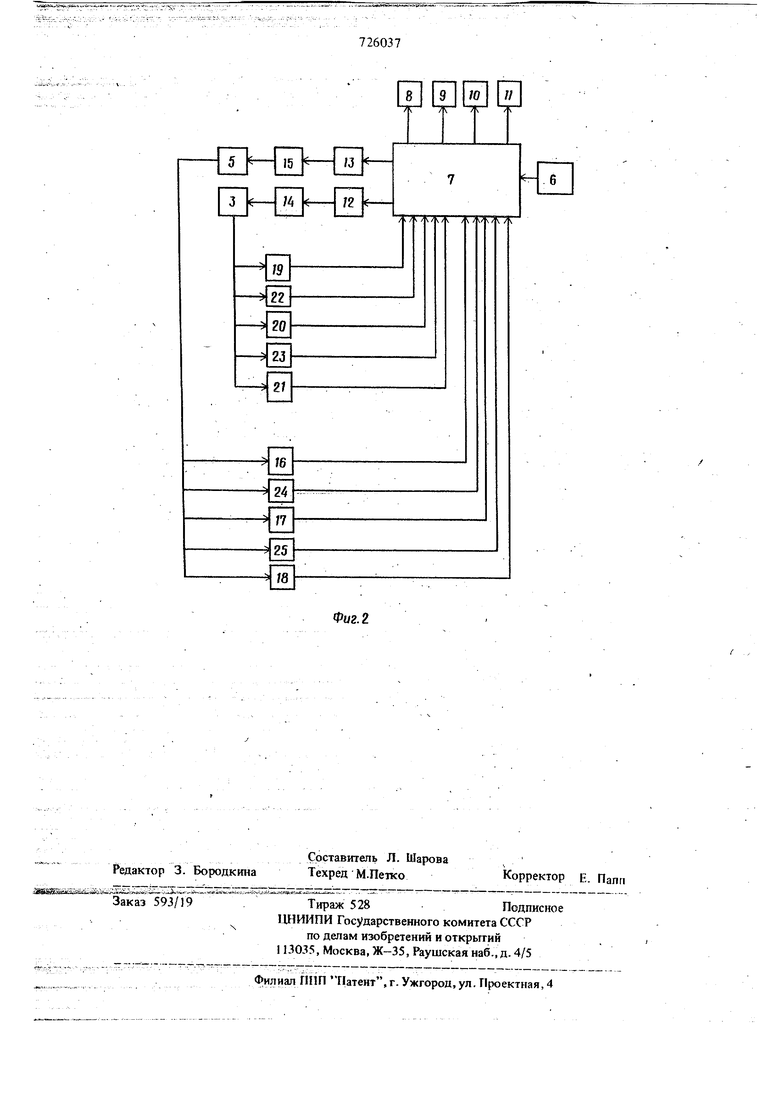
бота мостов 3 и 5 осуществляется с помощью схемы управления, включающей операторский пульт 6 управления, логический блок 7, с которыми связаны элементы 8 и 9 управления соответственно воздушной подушкой и упорами. Кроме того, к блоку 7 подсоединены элементы 10 и 11 управления резаками мостов, а .также элементы 12 и 13 управления двигателями 14 и 15 мостов 3 и 5. Перемещения последних контролируются блоком 7 через элементы обратной связи, выполненные в виде бесконтактных путевых пёреклк)чателей 16, 17 и 18 для моста 5 и переключателей 19, 20 и 21 для моста 3. Кроме того, устройство снабжено датчиками 22, 23, 24 и 2$ положения каждого моста, определяющими начало его динамического торможения и перевод его с рабочей скорости на пониженную..
Устройство |работает следующим образом. Лист стекла с поточной линии поступает на вйздушную подушку стола и оператором базируется по поднятым упорам 2. При этом мосты 3 и 5 находятся в исходном положении для нанесения реза (резаки находятся от края листа на расстоянии 8-10 мм), что контролируется переключателем 16 для моста 5 и переключателем 19 для моста 3. Нажатием операторской кнопки пульта 6 из блока 7 поступает команда элементов 8, 9 и 10 управления соответственно воздушной подушкой, упорами и резаками. Происходит выключение воздушной подушки, опускание упоров и резаков моста поперечной резки на стекло. После этого из блока 7 поступает команда элементу 12 управления двигателем 14. Последний вь1ключается, и мост 3 с опущенными резаками перемещается вдоль листа. Наносятся поперечные резы на 20-30 мм. До края листа переключатель 20 вьщает команду в блок 7, из которого поступает, сигнал в элемент 10. Происходит подъем резаков. При дальнейшем движении переключатель 21 дает команду на блок 7, из которого поступает сигнал в элемент 12 управления двигателем М- Мост 3 останавливается, а затем при нажатии кнопки элемента 8 воз вращается в исходное положение. В конце входа моста 3 переключатель 19 пбдаёт команду в блок 7 из которого поступает сигнал в элемент 12 управления двигателем 14. Мост 3 по инерции, пролетает переключатель 19, затем р еверсируется и на малой скорости подходит к переключателю 19 и останавливается. Мост 5
1управляемый блоком 7 с помощью элементов И управления резаками, элементов 13 управления двигателем 15 и переключателей 16, 17 и 18 работает аналогично, нанося продольные
резы. Остановка и возврат в исходное положение также происходят аналогично. Мост 5 работает во время остановки моста 3 перед возвращением в исходное положение. В конце обратного хода моста 3 переключатель 19
подает команду в блок 7, из которого поступает сигнал на включение воздушной подушки и подъем упоров 2.
Работа устройства с помощью датчиков положения осуществляется следующим образом.
При подходе моста 3 к переднему положению датчик 23 подает команду в блок 7, из которого поступают сигналы в элементы 10 и 12. Происходят подъем резаков, динамическое торможение и переход привода моста 3 на понижеНную скорость, а при дальнейщем перемещении на пониженной скорости останавливается по команде от переключателя 21.
При подходе моста 3 к исходному положению датчик 22 подает команду в блок 7, из
которого поступает сигнал в элемент 12. Происходят динамическое торможение и переход на пониженную скорость перемещения моста 3, а при дальнейщем перемещении его переключатель 19 Останавливает , этот мост.
Работа моста 5 аналогична работе моста 3.
Для моста 5 элементами для включения динамического торможения и перевода привода на пониженную скорость являются датчики положения 24 и 25.
Формула изобретения
Устройства для резки листового стекла по авт.св. № 551268, отличающееся тем, что, с целью повышения надежности в работе устройства, оно снабжено датчиками динамического торможения и изменения скорости для каждого моста, причем входы датчиков подключены к выходам соответствующих мостов, а выходы датчиков соединены с соответствующими входами логического блока.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №551268, кл. С 03 В 33/02, 1975 (прототип). /5 Z2 25 /7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для резки листового стекла | 1975 |
|
SU551268A1 |
| Устройство для резки листового стекла | 1978 |
|
SU791666A1 |
| ТРОЛЛЕЙБУС С ЧАСТИЧНОЙ НЕЗАВИСИМОСТЬЮ ОТ КОНТАКТНОЙ СЕТИ | 2012 |
|
RU2493027C1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2007 |
|
RU2340489C1 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ПЛАЗМЕННОЙ ГОЛОВКИ | 1991 |
|
RU2083337C1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2000 |
|
RU2184664C2 |
| Стенд для испытания автогрейдера | 1989 |
|
SU1647336A1 |
| Установка для раскроя ленты стекла на форматы | 1984 |
|
SU1217796A1 |
| Раскряжевочная установка | 1989 |
|
SU1720858A1 |
22
Фиг.}
