Изобретение относится к судостроению, в частности к системам дистанционного управления воздушными винтами изменяемого шага (ВИШ) судов на воздушной подушке (СВП).
Известна система дистанционного автоматизированного управления шагом ВИШ СВП по а.с. 317274, включающая в себя задатчик положения шага ВИШ, формирователи управляющих сигналов, логические элементы ИЛИ, И, сигнальную лампу контроля за наличием рассогласования, двухпозиционные электрогидравлические краны и включенный перед механизмом установки шага ВИШ двухскоростной реверсивный гидравлический исполнительный механизм, соединенный кинематически с механизмом установки шага ВИШ и датчиком обратной связи. В известной системе один канал управления ВИШ при переднем и заднем направлении движения СВП, в то же время по режимам загрузки тяговых двигателей СВП, в особенности мощных газотурбинных двигателей на больших СВП, допустимая скорость поворота лопастей ВИШ (время перемещения выходного органа механизма управления ВИШ) могут отличаться в положениях лопастей ВИШ "вперед" и "назад". В этом случае поворот лопастей ВИШ с одинаковой скоростью при движении СВП в разных направлениях существенно ухудшает динамические возможности системы при управлении СВП.
Известна также система дистанционного автоматизированного управления шагом ВИШ СВП по а.с. 702688, в которой в общий канал управления ВИШ введен дополнительный электрогидравлический преобразователь для управления поворотом лопастей ВИШ с повышенной скоростью в разрешенном диапазоне установки лопастей ВИШ при движении СВП "вперед". Эта система обеспечивает быстрое торможение СВП в экстренных случаях при воздействии на дополнительный орган управления, но решения, реализованные в этой системе, также не решают проблему максимально полного использования динамических возможностей системы управления ВИШ при движении СВП на переднем и заднем ходу при нормальной эксплуатации СВП.
Наиболее близким прототипом является система по а.с. 317274.
Цель изобретения - повышение надежности и улучшение динамических характеристик управления ВИШ при движении СВП на переднем и заднем ходу.
Поставленная цель достигается тем, что предлагаемая система имеет два независимых электрогидравлических канала управления ВИШ, один для переднего, другой для заднего хода СВП, подключенных каждый электрически к своему концевому выключателю в исполнительном механизме, а гидравлически подключенных параллельно к одноименным входам исполнительного механизма.
При этом в каждом канале управления предусмотрены блоки контроля скорости отработки канала, содержащие элементы сравнения фактической скорости отработки канала с заданной эталонной уставкой, подключенные каждый блок выходом к сигнальной лампе исправности своего канала управления и параллельно подключенные к автоматическому переключателю каналов управления.
Автоматический переключатель каналов управления содержит для каждого канала последовательно соединенные элементы И, ИЛИ, инвертор, запоминающее устройство, а выходы переключателя подключены раздельно для блокировки неисправного канала управления и перекрестно для подключения исправного канала управления в работу во всем диапазоне изменения шага ВИШ как на переднем, так и на заднем ходу СВП.
На чертеже представлена функциональная схема системы.
Система состоит из задатчика 1, элемента сравнения 2, электрогидравлических каналов 3 управления ВИШ при движении СВП на переднем ходу и 4 - управления ВИШ при движении СВП на заднем ходу, подключенных гидравлическими каналами к исполнительному механизму 5 и электрически - к концевым выключателям 6 зоны переднего хода и 7 зоны заднего хода, кинематически связанным с исполнительным механизмом 5.
Исполнительный механизм 5 кинематически связан с механизмом 8 установки шага лопастей ВИШ 9 и с датчиком 10 обратной связи. Датчик 10 подключен к элементу сравнения 2, входам каналов управления 3 и 4, к входу защитного элемента И 11 и к указателю 12 положения исполнительного механизма 5. К выходу элемента сравнения 2 подключена сигнальная лампа 13 указания наличия рассогласования между задатчиком 1 и датчиком 10.
Канал 3 управления ВИШ на переднем ходу СВП содержит входной элемент И 3.1, подключенный входом к элементу сравнения 2 и выходом - к формирователю 3.2 импульсов управления, выходы которого подключены к управляющим элементам И 3.3 и 3.4. К другим входам И 3.3 и 3.4 подключены параллельно концевой выключатель 6 зоны переднего хода и выход защитного И 11. Выходы И 3.3 и 3.4 подключены к управляющим элементам электрогидравлического преобразователя 3.6, подключенного гидравлически своими входами к источнику гидравлического питания (на схеме не показан), а выходами - к исполнительному механизму 5. Гидравлические каналы от преобразователя 3.6 к механизму 5 снабжены регулируемыми дросселирующими устройствами 3.7 и 3.8.
В составе канала 3 имеется блок 3.9 контроля скорости отработки канала, содержащий последовательно соединенные элемент И 3.9.1, элемент задержки времени 3.9.2, элементы сравнения 3.9.3 и 3.9.4 и эталонный элемент 3.9.5 скорости отработки канала 3.
Канал 4 управления ВИШ на заднем ходу СВП полностью аналогичен по устройству каналу 3, обозначения составляющих канал 4 элементов и их подключение соответствуют приведенным в описании канала 3, но с первой цифрой 4 в обозначении элемента (цифра 4 в обозначении элементов канала 4 указывает на их принадлежность к каналу 4). Отличие состоит в том, что вместо концевого выключателя 6 зоны переднего хода, подключенного к каналу 3, к каналу 4 подключен концевой выключатель 7 зоны заднего хода.
Сигналы с выхода блоков 3.9 и 4.9 контроля скорости отработки каналов управления 3 и 4 соответственно подключены к автоматическому переключателю 14 каналов управления.
Автоматический переключатель 14 содержит для каждого канала управления 3 и 4 последовательно соединенные элементы И 14.1 и 14.2, запоминающие устройства 14.3 и 14.4, элементы ИЛИ 14.5 и 14.6, инвертирующие элементы 14.7 и 14.8 соответственно.
Выход И 14.1 и запоминающего устройства 14.3 через ИЛИ 14.5 подключены к входу ИЛИ 4.5 канала 4 и к сигнальной лампе 15 неисправности канала 3, а через инвертирующий элемент 14.7 и ИЛИ 16 - к входу И 3.1 канала 3.
Выходы И 14.2 и запоминающего устройства 14.4 через ИЛИ 14.6 подключены к входу ИЛИ 3.5 канала 3 и к сигнальной лампе 17 неисправности канала 4, а через инвертирующий элемент 14.8 и ИЛИ 18 - к входу И 4.1 канала 4.
Для сброса запрета на управление ВИШ от неисправного канала к каналам 3 и 4 через ИЛИ 16 и 18 соответственно подключен кнопочный переключатель 19, подключенный также к входам сброса запоминающих устройств 14.3 и 14.4 автоматического переключателя 14.
Система работает следующим образом.
Поворотом задатчика 1 на соответствующий угол устанавливается заданное положение шага ВИШ. Сигналы, пропорциональные заданному углу поворота лопастей ВИШ от задатчика 1 и фактическому углу поворота от датчика обратной связи 10, поступают на элемент сравнения 2, с которого разностный сигнал поступает на входы каналов управления 3 и 4.
Рассмотрим работу канала 3 (работа канала 4 аналогична).
Сигнал от элемента сравнения 2 поступает на вход И 3.1. Если на другом входе И 3.1 присутствует сигнал об исправности канала 3 (поступает с выхода ИЛИ 14.5 автоматического переключателя 14), сигнал от элемента 2 проходит на формирователь импульсов управления 3.2, который в зависимости от знака разностного сигнала через И 3.3 или И 3.4 подает сигнал на управляющие элементы электрогидравлического преобразователя 3.6, который обеспечивает перепуск рабочей жидкости через регулируемые дросселирующие устройства 3.7 и 3.8 на механизм 5.
К другим входам И 3.3 и 3.4 через ИЛИ 3.5 подключен концевой выключатель 6 сигнализации о нахождении механизма 5 в зоне переднего хода и разрешающий работу канала 3 только в этой зоне. К входам И 3.3 и 3.4 подключен также сигнал с выхода защитного И 11 при наличии на входах И 11 сигналов от задатчика 1 и датчика обратной связи 10 (нет обрыва в целях этих устройств).
В канале 3 имеется блок 3.9 контроля скорости отработки канала 3. На входной И 3.9.1 блока 3.9 поступают сигналы о наличии рассогласования с элемента 2 и о работе канала 3 от концевого выключателя 6. Сигнал с выхода И 3.9.1 поступает на вход запуска элемента выдержки времени 3.9.2, который с заданной скважностью пропускает сигнал от датчика обратной связи 10 на вход элемента сравнения 3.9.3, на который также поступает непрерывный сигнал от датчика 10. Разность этих сигналов с выхода элемента 3.9.3, соответствующая скорости отработки канала 3, поступает на элемент сравнения 3.9.4, где она сравнивается с выходным сигналом от эталонного элемента 3.9.5 скорости отработки канала 3.
Если разность сигналов на элементе 3.9.4 выше заданного порога нечувствительности этого элемента (канал 3 отрабатывает заданную команду слишком медленно - например, из-за неисправности или загрязнения дросселирующих устройств 3.7 или 3.8. или не отрабатывает вообще - например, из-за неисправности преобразователя 3.5), сигнал с выхода элемента 3.9.4 поступает на автоматический переключатель 14 каналов управления, на вход И 14.1, на другом входе которого присутствует сигнал от концевого выключателя 6.
Сигнал с выхода И 14.1 запоминается запоминающим устройством 14.3, через ИЛИ 14.5 поступает на сигнальную лампу 15 неисправности канала 3 и через ИЛИ 4.5 - на исполнительную часть (И 4.3 и И 4.4) канала 4, а через инвертор 14.7 блокирует работу канала 3, снимая с входа И 3.1 сигнал, разрешающий работу канала 3 (поступал через ИЛИ 16).
Работа канала 3 блокируется, а управление переключается на канал 4 во всем диапазоне работы ВИШ.
После восстановления работоспособности канала 3 он может быть разблокирован подачей сигнала от кнопочного переключателя 19 через ИЛИ 16 на вход И 4.1 и на сброс устройства 14.3.
Работа канала 4 и автоматического переключателя 14 при работе канала 4 полностью аналогичны описанной выше работе канала 3.
Предлагаемая система позволит максимально использовать динамические возможности двигательно-движительного комплекса СВП и системы управления ВИШ при движении СВП как на переднем, так и на заднем ходу, и значительно повысить надежность управления ВИШ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2007 |
|
RU2340489C1 |
| ДИСТАНЦИОННЫЙ ПРИВОД УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2238880C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2254502C1 |
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ ПРИВОДА | 2001 |
|
RU2214538C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД | 2003 |
|
RU2256106C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2251011C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД С НЕСКОЛЬКИМИ ПОСТАМИ УПРАВЛЕНИЯ | 2003 |
|
RU2256105C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2256811C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С РЕВЕРС-РЕДУКТОРНОЙ ПЕРЕДАЧЕЙ | 2003 |
|
RU2262609C2 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170905C1 |
Изобретение относится к судостроению, в частности к системам управления воздушными винтами изменяемого шага (ВИШ) судов на воздушной подушке (СВП). Система содержит задатчик положения шага винта, формирователь управляющих сигналов, логические элементы, сигнальную лампу рассогласования, преобразователи, исполнительный механизм. В систему включены два независимых канала управления винтом - для переднего и заднего ходов судна, подключенных гидравлически к исполнительному механизму, а электрически - к его концевому выключателю. Каждый канал управления содержит блок контроля скорости отработки канала, автоматический переключатель каналов и элементы сравнения фактической и заданной скоростей. Автоматический переключатель содержит запоминающие устройства, которые подключены к блокам контроля скорости отработки, сигнализации неисправности, переключателю и блокировке каналов управления. Система позволяет повысить надежность и динамичность управления ВИШ при движении СВП на переднем и заднем ходу. 3 з.п.ф-лы, 1 ил.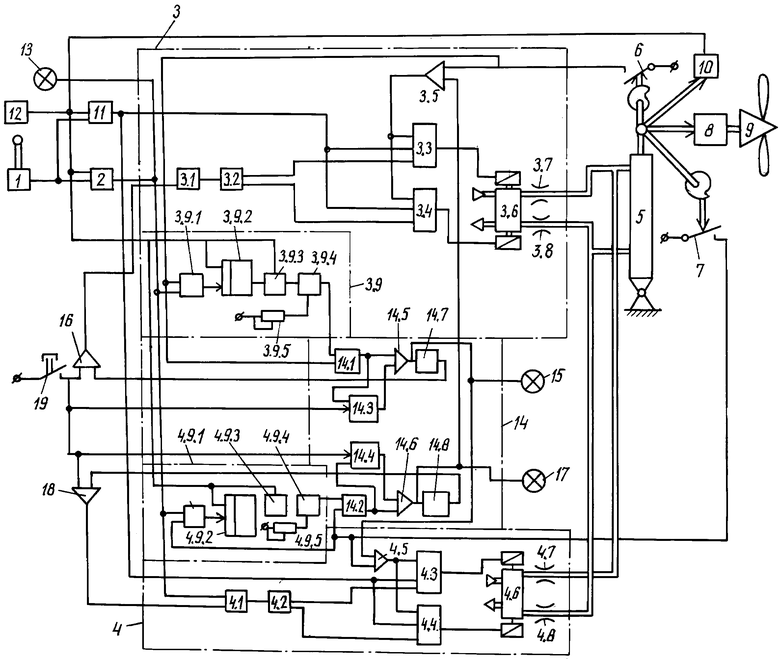
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАНОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 0 |
|
SU317274A1 |
| Электрогидравлическая система управления винтом регулируемого шага | 1981 |
|
SU965901A1 |
| US 3915590 A, 28.10.1975 | |||
| US 4156475 A, 29.05.1979. | |||

