(54) СИСТЕМА ПИТАНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ПРИВОДА
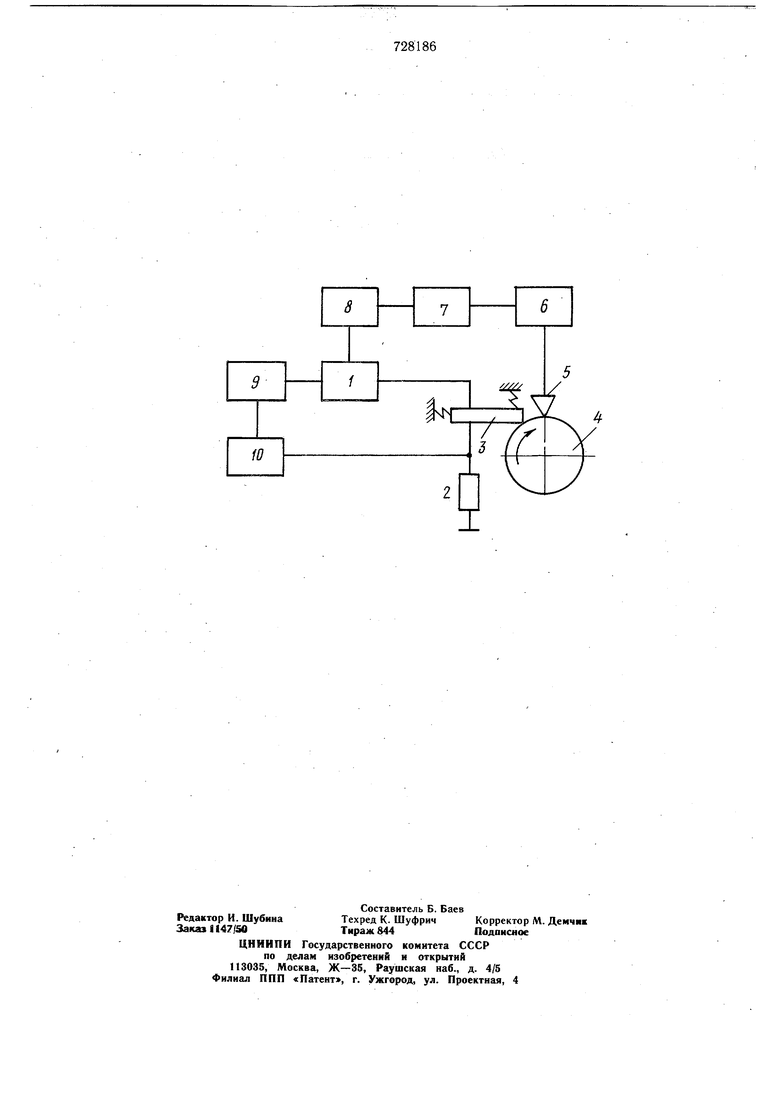
Ha чертеже представлена схема питания привода.
Выход генератора 1 переменного напряжения подключен к последовательно соединенному резистору 2 и пьезокёрамическому преобразователю 3, который упруго сопряжен с ротором 4. Датчик 5 скорости вращения ротора через усилитель 6, частотный дискриминатор 7 и блок управления 8 подключен к одному входу управления генератора, ко второму входу которого через второй блок управления 9 подключен выход амплитудного демодулятора 10, вход которого подсоединен к точке соединения преобразователя и резистора.
Привод работает следующим образом.
При включении напряжения питания сигна Г переменной частоты с выхода генератора 1 подается к последовательно соединенным пьезокёрамическому преобразователю 3 и резистору 2. При частоте сигнала переменной частоть, соответствующей резонансной частоте механических колебаний преобразователя 3, его внутреннее сопротивление наименьшее. Ток, протекающий по нему и резистору, создает наибольшее напряжение на резисторе 2.
При упругом взаимодействии преобразователя 3 и ротора 4 последний начинает вращаться с угловой скоростью со- При этом на роторе обеспечивается наибольший момент.
Механическая мощность РМ на валу ротора 4 привода будет
,(1)
гр К - коэффициент, учитывающий единицы измерения;
М - момент вращения ротора.
В то же время пьезокерамический преобразователь 3 со стороны ротора 4 нагружен механическим сопротивлением RH равным
рМ
(2)
К - радиус ротора.
В реальных устройствах, например в устройствах транспортирования магнитной или фото-ленты, валы вибродвигателей нагружены не постоянным по времени моментом, из-за изменения диаметра рулона, эксцентриститетов вращающихся элементов и т. п. Из формулы (1) видно, что при постоянной мощности привода Р,, увеличение момента Л внешней нагрузки вала вызывает уменьшение его угловой скорости щ и наоборот. Изменение момента М нагрузки и угловой скорости 01 с противоположным знаком вы728186
зывает изменение сбпротивления Ки нагрузки пьезокерамического преобразователя 3 (формула 2). Это ведет к изменению тока через преобразователь 3 и резистор 2.
Напряжение с резистора 2 подается к
амплитудному демодулятору 10, с выхода которого через блок управления 9 происходит управление напряжением сигнала генератора 1. При увеличении момента нагрузки М вала привода увеличивается амплитуда сигнала питания преобразователя 3, который увеличивает момент вращения ротора 4, тем самым уменьшая колебания его угловой скорости. Так как частота питания преобразователя 3 в реальных пьезоэлектрических приводах находится в диапазоне от 40 до 100 кГц, частота демодулированного сигнала на входе блока управления достигает 10 кГц, что позволяет компенсировать высокочастотные компоненты колебаний угловой скорости ротора 4, вызываемых, например, неоднородно(5тью микроконтакта
между наконечником преобразователя 3 и ротором 4.
Использование двойной обратной связи позволяет стабилизировать угловую скорость вращения пьезоэлектрического привода с большей точностью и в широком диапазоне частот.
Формула изобретения
0 Система питания пьезоэлектрического привода, содержащая генератор переменного напряжения, вход управления которого соединен с датчиком скорости через усилитель, частотный дискриминатор и блок управления, а выход - с пьезоэлектрическим
преобразователем, отличающаяся тем, что, с целью повышения стабильности вращения при изменении момента внещней нагрузки ротора, она содержит дополнительно резистор, амплитудный демодулятор и второй блок управления, причем резистор включен последовательно с пьезокерамическим преобразователем, а общая их точка соединена через амплитудный демодулятор и второй блок управления со вторым входом управления генератора.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 570099, кл. G 11 В 15/40, 1976.
2.Авторское свидетельств СССР
№ 624279, кл. G 11 В 15/40, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибродвигатель | 1979 |
|
SU858153A1 |
| Устройство для управления вибродвигателем | 1978 |
|
SU764016A1 |
| Устройство для питания пьезоэлектрического вибродвигателя | 1978 |
|
SU705568A1 |
| Лентопротяжный механизм | 1977 |
|
SU624279A1 |
| Устройство для управления пьезоэлектрическим вибродвигателем | 1978 |
|
SU744879A1 |
| Вибродвигатель | 1978 |
|
SU794686A1 |
| Устройство для питания пьезоэлектрического вибродвигателя | 1978 |
|
SU668032A1 |
| Устройство для питания пьезокерами-чЕСКОгО пРЕОбРАзОВАТЕля ВибРО-дВигАТЕля | 1979 |
|
SU817814A1 |
| Вибродвигатель | 1979 |
|
SU771773A1 |
| Устройство для управления скоростью движения магнитной ленты | 1976 |
|
SU600606A1 |