(54) ВИБРОДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибродвигатель | 1979 |
|
SU949741A1 |
| Вибродвигатель | 1979 |
|
SU771773A1 |
| МНОГОКООРДИНАТНЫЙ ПЬЕЗОДВИГАТЕЛЬ | 1999 |
|
RU2166832C1 |
| Система питания пьезоэлектрического привода | 1978 |
|
SU728186A1 |
| Вибродвигатель | 1978 |
|
SU805476A1 |
| Вибродвигатель | 1978 |
|
SU794686A1 |
| Устройство для питания пьезоэлектрического вибродвигателя | 1978 |
|
SU705568A1 |
| Вибродвигатель | 1982 |
|
SU1089618A1 |
| Вибродвигатель | 1979 |
|
SU817817A1 |
| Вибродвигатель | 1981 |
|
SU968868A1 |
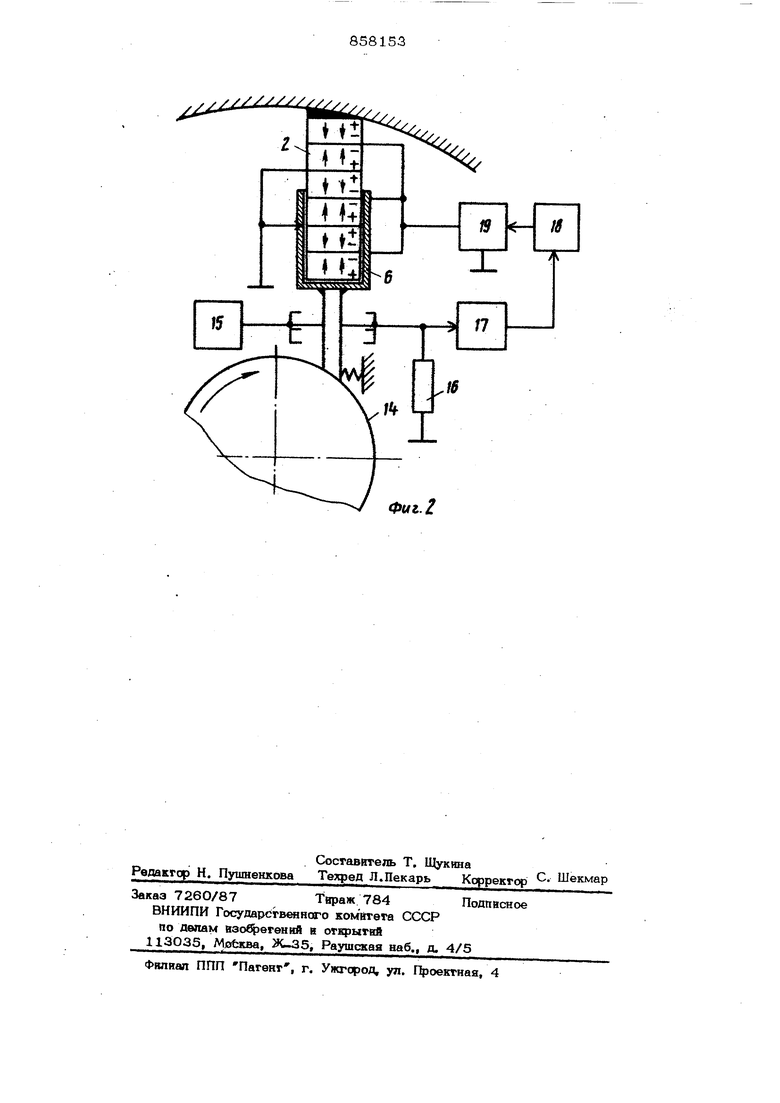
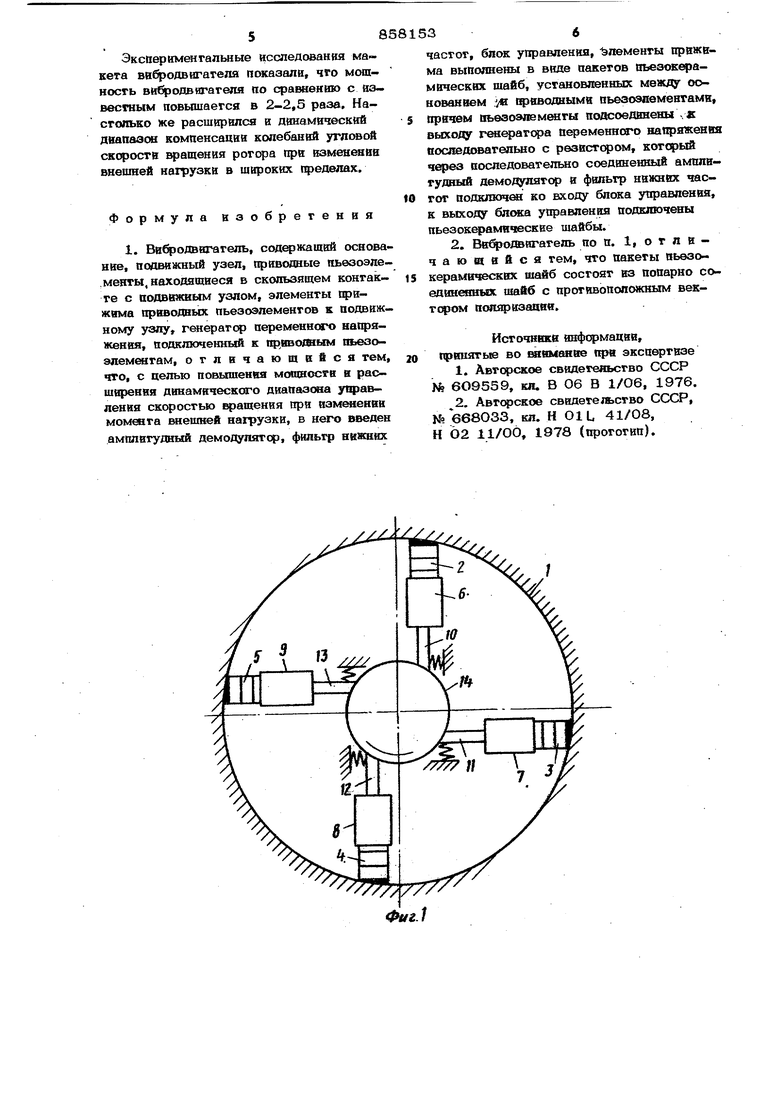
Изобретение относятся к приборостроению к может быть использовано в устройствах поз иди (жирования и исполнительных механизмах. Известен синхронный вибропривод, содержащий ротор, пьезокерамическне гфеобразоватепи, закрепленные на роторе и под ключенные к источнику переменного напряжения через фазосдвигающую схему в упругий элемент, охватывающий пьезопреобразователи, причем к упругому элементу прижат дополнительный пьезопреоб- разователь, подключенный к дополнительному источнику переменного напряжения, соединенному с блоком управления ГЦ. Недостатки известного вибропривода состоят в том, что у него сиграничена мощность, так как вращение ротора создается при взаимодействии бегущей водны деформации с наконечнике дополнительного пьезогфеобразователя. Известен вибродвигатель, содержащий основание, подвижный узел, приводные пьезоэлементы, находящиеся в скользящем ксятакге с подвижным узлом, элементы прижима рабочих пьеаоэлементов к подвижному уаяу, г«1ератор переменнся о напряжения, пощяюченный к рабочим пьеаоэлем 1там. Прижим приводных элементов к подвижному узлу осуществляется с помощью магнита с управляемой величиной магнитного потока и магнитопроводапих накладок, установленных на рабочих пьезоэлементах и находящихся в магнитной связи с магнитом С23. Недостатки известного устрсЛства состоят в тоМ| что у него ограничена мощность, так как пьезоэлементы /к подвижному узлу прижимаются за счет магнитного потока, изменение величины которого в зсше взаимодействия пьезоэлемента и подвижного узла является ограниченней. этого ограничен и динамический диапазон компенсации колебаний угповой скорости. Цель изобретения - повьпиение uoaifности и расширение динамического диапазона управления скоростью вращения при изменении момента внешней нагрузки подвижного узла. Посгавпенная цепь досгигаегся тем, что в известный вибродвигатепь, содержащий основание, подвижный узеп, рабочие пьезоэпементы, находящиеся в скользящем контакте с подвижным узлом, элементы прижима приводных пьезоэлементов к подвижному узлу, генератор переменного напряжения, подключенный к рабочим пьезоэлементам, в него введен амплитудный демодулятор, фильтр нижних частот, блок управления, элементы прижима выполнены в виде пакетов пьезокерамических шайб, установленных между основанием и приводными пьезоэлементами, причем пьезоэлементы подсоединены к выходу генератора переменного напряжения Последовательно с резистором, который через последовательно соединенны амплитудный демодулятор и фильтр нижних частот подключен ко входу блока управления, к выходу блока управления подключены пьезокерамические шайбы. Кроме того, пакеты пьезокерамических шайб состоят из попарно соединенных шайб с противоположным вектором поляризации. На фиг, 1 показана механическая схема вибродвигателя; на фиг. 2 - электрическая схема «го питания. На основании 1 прикреплены пакеты 2-5 пьезокерамических шайб, которые установлены в держателях , выполненных в виде стаканов. К держателям прикреплены также приво/щые пьезоэлементы Ю13, находящиеся в скользящем контакте с подвижным узлом 14. Ъб1Шадки пьеао элементов 10-13 подключены к вьссоду генератора переменного напряжения 15 последовательно с резисгс ом 16, который через амплитудный демодулятор 17, фильтр 18 нижних частот и блок 19 упра вления подключен к обкладкам пьезокерамических шайб, соединенных попарно с противоположным вектором пол5физации в пакетах 2-5. Вибродвигатель работает следующим образом. При включении питания переменное напряжение с генератора 15 подается парал лельно к обкладкам пьеэоэлементов 1О13, одним концом прикрепленных к держа телям 6-9, выполненным в виде стаканов а другим концом с определенным натягом взаимодействующим с подвижным узлом (ротсром) 14. Пьезоэлементы 1О-13 совершают резонансные продольные колебания и при взаимодействии с ротором 14 сообщают ему момент вращения. Со сто834 РОНЫ ротора 14 пьезоэлементы 10-13 нагружены механическим согф от явлением RH, равным(А , где М - момент вращения U/ - угловая скорость; R - радиус ротора. В реальных устройствах, использующйх вибродвигатели, например в устройствах транспортирования магнитной ЕЛИ фото ленты, валы вибродвигателей нагружены изменяющимся во времени моментом из-за изменения диаметра рулона, эксцентриситета ведущего вала и других механических неточностей тракта. Увеличение, например, момента М нагрузки, вызывает уменьшение угловой скорости вращения ротора вибродвигателя, что, как видно из формулы (1), вызьгоает увеличение сопротивления нагрузки пьезоэлементов 1О-13. Это вызьгоает уменьшение величины тока, протекающего через пьезоэлементы и резистор 16. Сигнал с резистора 16 детектируется в амплитудном демодуляторе 17 и через нижних частот фильтр 18 подается к блоку 19 уп- равления, на выходе которого амплитуда сигнала увеличивается. Сигнал с блока уггравления 19 подается к обкладкам пьезокерамических шайб, соединенных попарно с противоположным вектором поляризации, перпендикулярным к плоскости обкладок, и вызывает расширение шайб в направлении вектора поляризации. Увеличение сигнала на выходе блока 19 управления способствует увеличению силы F прижатия пьезоэлементов 10-13 к ротору 14. Сила трення F тр., создающая момент вращения ротора 14, равна где (а - коэффициент трения. Из формулы (2) видно, что при увеличении силы F прижатия пьезоэлементов 1О-13 к ротору 14 способствует повышению его момента вращения, компенсирующего увеличение момента внешней нагрузки, а тем самым и уменьшение угловой скорости вращения ротора 14. Так как при деформации пьeзoкepaмических шайб они развивают значительные усилия, динамический диапазон компенсации как постоянной, так и переменной составляющих момента внешней нагрузки является относительно большим, что также способствует значительному повыше1ию мощности внбродвигателя в целом.
Эксиврнмй1гапьные исследования макета ввбродввгателя показали, чго мошность вибродвйгагепя по сравнению с из-. вестным повышается в 2-2,5 раза. Настолько же расширился в динамический двапаэш компенсации колебаний угловой скорости вращения ротора при измененвв внешней нагрузки в широких пределах.
Формула изобретения
частот, блок управления, Элементы прижима выполнены в виде пакетов пьезок амическвх шайб, установленных между оонованвем :/в {фиводными пьезоэлементами, причем вьвзоэлгм ты поасоединевы ..к выходу генератора переменного на1фяженвя ооследователыю с резистором, который через последователыю соединенный амплитудный демодулятс и фильтр нижних частот подключи ко входу блока у1фавления, к выходу блсжа управления подключены пьезокерамвческие шайбы.
Источники инф(фмацив, Припятью во вмаяве прв экспертизе
Н 02 11/00, 1978 (прототип).
//X
