(54) СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ САМОЛЕТА В ЗОНЕ АЭРОДРОМА
I
Изобретение относится к области ближ- ; ней радионавигации самолетов, а именно к способам и системам определения полярных координат самолета с помощью сигналов, переизлучаемых самолетным ответчиком и принимаемых вращающимся аэродромным антенным устройством.
Известны радиолокационная система контроля положения движущихся объектов, содержащая передатчик зондирующих сигналов и способ определения координат путем излучения сигналов, ретрансляции их ответчиком на подвижном объекте, приема излучаемых подвижным объектом сигналов приемным устройством, состоящим из двух антенн, с последующим преобразованием принятых сигналов и отображением полученной информации о координатах подвижного объекта 1 . .
Недостаток такой системьГ сложность приемного антенного устройства и значительная площадь, им занимаемая.
Ближайщим техническим рещением к предлагаемому изобретению является устройство приема и обработки сигналов, излучаемых подвижным объектом, содержащее синхронно вращаемые разнесенные относительно оси вращения по диаметру две антенны, подключенные к входу преобразователя, выход которого через интегратор подключен к индикатору полярных координат, реализующее способ, заключающийся в приеме излучаемых источником сигналов аэродромным синхронно вращаемым антенным устройством с последующим их преобразованием, интегрированием и отображением полярных координат 2.
Однако такая система и такой способ не
10 позволяют одновременно определить азимут и угол.
Цель изобретения - повыщение точности одновременного определения полярных координат самолета относительно аэродромного антенного устройства.
15
Цель достигается тем, что по предлагаемому способу преобразование осуществляют путем смещения сйгна.лов каждой из ан.тенн с сигналом соответствующего гетеродина, выделения их разностной частоты, совместного квaдpaтичнo o детектированияпреобразованных сигналов обеих антенн, фильтрации результирующего сигнала, перемножения с сигналом разности частот гетеродинов, выделения нижних частот, двойной
модуляции по фазе, аналогичной фазам принятых сигналов, с одновременной двумерной корреляцией..
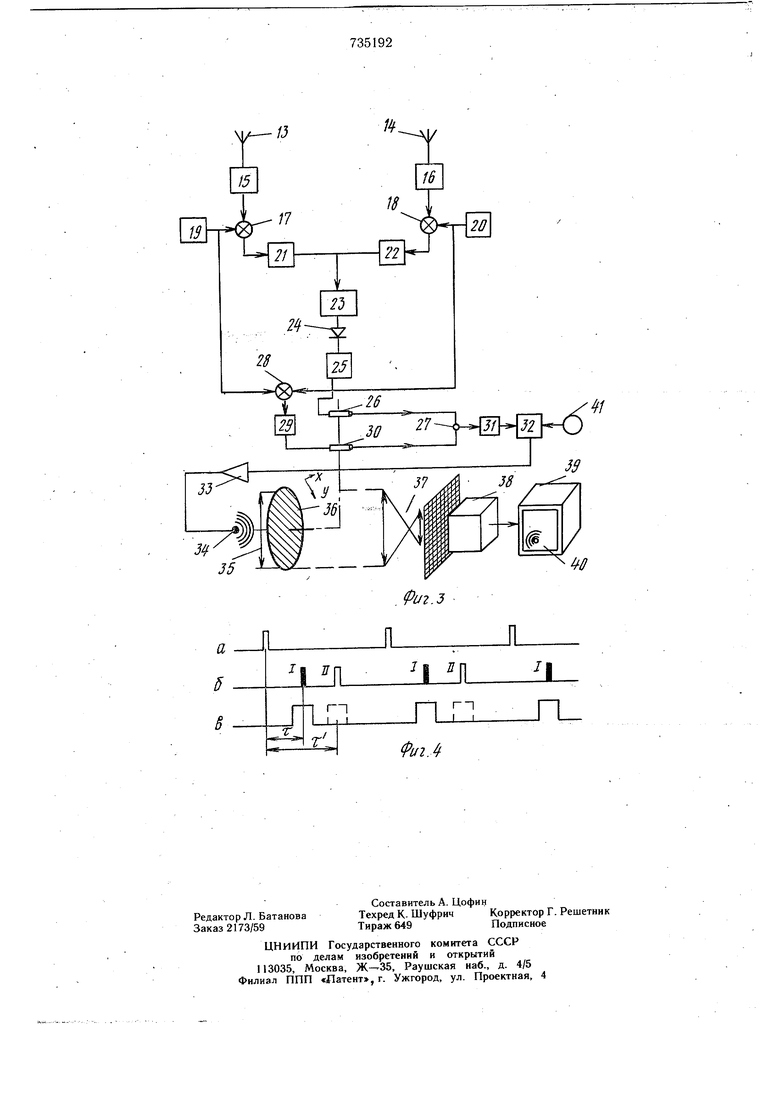
На фиг. 1 приведена общая схема системы; на фиг. 2 - аэродромная приемная антенна; на фиг. 3 - блок-схема аэродромного приемного устройства; на фиг. 4 - диаграмма радиоимпульсов обмена.
Аэродром оборудован передатчиком 1 (фиг. 1), антенна 2 которого излучает высокочастотную энергию. Самолет 3, находящийся в зоне аэродрома, имеет приемопередатчик 4, который в ответ на сигнал запроса аэродрома, принимаемый антенной 5 самолета, посылает при помощи антенны 6 высокочастотные ответные импульсы, принимаемые на аэродроме антенной 7, подключенной к входу приемника 8.
Каждый приближающийся к аэродрому самолет оборудован приемопередатчиком, и несущие частоты импульса ответа этих различных самолетов близки между собой.
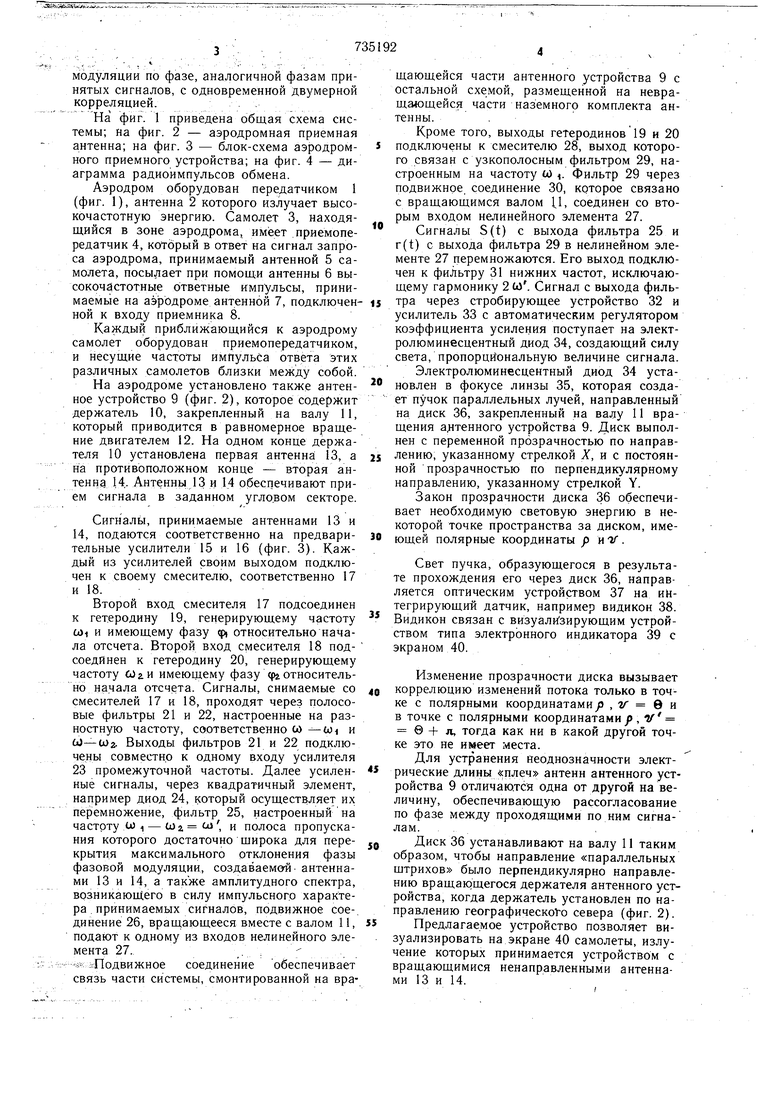
На аэродроме установлено также антенное устройство 9 (фиг. 2), которое содержит держатель 10, закрепленный на валу 11, который приводится в равномерное вращение двигателем 12. На одном конце держателя 10 установлена первая антенна 13, а на противоположном конце - вторая антенна 14.. Антенны 13 и 14 обеспечивают прием сигнала в заданном угловом секторе.
Сигналь, принимаемые антеннами 13 и 14, подаются соответственно на предварительные усилители 15 и 16 (фиг. 3). Каждый из усилителей своим выходом подключен к своему смесителю, соответственно 17 и 18.
Второй вход смесителя 17 подсоединен к гетеродину 19, генерирующему частоту coi и имеющему фазу cpi относительно начала отсчета. Второй вход смесителя 18 подсоединен к гетеродину 20, генерирующему частоту со а и имеющему фазу фг относительно начала отсчета. Сигналы, снимаемые со смесителей 17 и 18, проходят через полосовые фильтры 21 и 22, настроенные на разностную частоту, соответственно W -coi и 0-0)2. Выходы фильтров 21 и 22 подключены совместно к одному входу усилителя 23 промежуточной частоты. Далее усиленные сигналы, через квадратичный элемент, например диод 24, который осуществляет их перемножение, фильтр 25, настроенный на частоту to 1 - coi Cij и полоса пропускания которого достаточно щирока для перекрытия максимального отклонения фазы фазовой модуляции, создаваема-антеннами 13 и 14, а также амплитудного спектра, возникающего в силу импульсного характера принимаемых сигналов, подвижное соединение 26, вращающееся вместе с валом 11, подают к одному из входов нелинейного элемента 27.. , :, i: Подвижное соединение обеспечивает связь части системы, смонтированной на вра735192
щающейся части антенного устройства 9 с остальной схемой, размещенной на невращающейся части наземного комплекта антенны..
Кроме того, выходы гетеродинов 19 и 20 подключены к смесителю 28, выход которого связан с узкополосным фильтром 29, настроенным на частоту со ,. Фильтр 29 через подвижное, соединение 30, которое связано с вращающимся валом И, соединен со вторым входом нелинейного элемента 27.
Сигналы S(t) с выхода фильтра 25 и r(t) с выхода фильтра 29 в нелинейном элементе 27 перемножаются. Его выход подключен к фильтру 31 нижних частот, исключающему гармонику 2 W. Сигнал с выхода фильтра через стробирующее устройство 32 и усилитель 33 с автоматическим регулятором коэффициента усиления поступает на электролюминесцентный диод 34, создающий силу света, пропорциональную величине сигнала.
Электролюминесцентный диод 34 установлен в фокусе линзы 35, которая создает пучок параллельных лучей, направленный на диск 36, закрепленный на валу 11 вращения a тeннoгo устройства 9. Диск выполнен с переменной прозрачностью по направлению, указанному стрелкой J, и с постоянной прозрачностью по перпендикулярному направлению, указанному стрелкой Y.
Закон прозрачности диска 36 обеспечивает необходимую световую энергию в некоторой точке пространства за диском, имеющей полярные координаты f nV.
Свет пучка, образующегося в результате прохождения его через диск 36, направляется оптическим устройством 37 на интегрирующий датчик, например видикон 38. Видикон связан с визуализирующим устройством типа электронного индикатора 39 с экраном 40.
Изменение прозрачности диска вызывает коррелюцию изменений потока только в точке с полярными координатами , V 9 и в точке с полярными координатами у), v в + л, тогда как ни в какой другой точке это не имеет места.
Для устранения неоднозначности электрические длины «плеч антенн антенного устройства 9 отличаются одна от другой на величину, обеспечивающую рассогласование по фазе между проходящими по ним сигналам. , .
Диск 36 устанавливают на валу 11 таким образом, чтобы направление «параллельных щтрихов было перпендикулярно направлению вращающегося держателя антенного устройства, когда держатель установлен по направлению географического севера (фиг. 2).
Предлагаемое устройство позволяет визуализировать на экране 40 самолеты, излучение которых принимается устройством с вращающимися ненаправленными антеннами 13 и 14.
Устройство позволяет также осуществлять выбор Среди этих самолетов.
На стробирующее устройство 32 подаются сигналы с тактового устройства 41, которое управляет импульсами, подаваемыми передатчиком 1 в антенну 2. Эти импульсы запроса изображень на фиг. 4 а.
Импульсы ответа, принимаемые аэродромным приемником с самолета I,изображены жирными линиями, а с более удаленного самолета П - двойными тонкими линиями (фиг. 46). Промежуток между импуль.сами запроса и ответа соответствует времени полного хода радиолуча плюс систематическое запаздывание , вносимое самим бортовым оборудованием. Когда стробирующее устройство 32 открыто в течение времени, изображенного на фиг. 4в в виде сплощных строб-импульсов, середина которых смещена на время -с относительно импульса запроса, обрабатываются только те сигналы, которые приходят с самолета I, при этом период повторения строб-импульсов равен периоду повторения импульсов запроса.
ЕСЛИ, как показано пунктиром, стробирующее устройство 32 отпирается на промежуток времени с серединой на т , то принимаются сигналы, поступающие с самолета II, а импульсы с самолета I исключаются.
Таким образом, аэродром может брать на себя задачу управления движением одного или нескольких самол етов, значение отдаленности которых от .аэродрома заключено между двумя заданными величинами.
Оставляя стробирующее устройство постоянно открытым, на экране 40 получают изображение всех самолетов, находящихся вблизи аэродрома на расстояниях, соответствующих дальности действия радиосвязи, и в некоторых случаях - в определенном угловом секторе.
Устройство позволяет определить для каждого самолета его азимут © и угол места у . Эти данные передаются с аэродрома. на соответствующий самолет при помощи системы передачи данных.
Формула изобретения
1. Способ определения координат самолета в зоне аэродрома путем излучения зондирующих сигналов, ретрансляции их самолетным ответчиком, приема указанных сигналов аэродромным синхронно вращаемым антенным устройством с последующим их преобразованием, интегрированием и отображением полярных координат, отличающийся тем. Что, с целью повышения точности одновременного определения полярных координат самолета относительно аэродромного антенного устройства, преобразование осуществляют путем смещения сигналов каж дои из антенн с сигналом соответствующего гетеродина, выделения их разностной частоты, совместного квадратичного детектирования преобразованных сигналов обеих антенн, фильтрации результирующего сигнала, пере,Q множения с сигналом разности частот гетеродинов, выделения нижних частот, двойной модуляции по фазе, аналогичной фазам принятых сигналов, с одновременной двумерной корреляцией.
- 2. Система определения координат самолета в зоне аэродрома, содержащая аэродромный приемопередатчик, бортовой ответчик и аэродромное приемное антенное устройство, содержащее синхронно вращаемые разнесенные относительно оси вращения по диаметру две антенны, подключенные к входу преобразователя, выход которого через интегратор подключен к индикатору полярных координат, отличающаяся тем, что, с целью повыщения точности одновременного определения полярных координат S самолета относительно аэродромного антенного устройства, преобразователь выполнен в виде двух смесителей, один вход каждого из которых подключен к своей антенне, второй вход - к своему гетеродину, а выходы - .через фильтры разностных частот к общему квадратичному детектору, выход которого через полосовой фильтр подключен к первому входу нелинейного элемента, второй вход которого через узкополосный фильтр связан с выходом смесителя частот гетеродинов, а
J выход через последовательно соединенные фильтр нижних частот, стробирующее устройство, усилитель с автоматической регулировкой коэффициента усиления подключен к излучателю оптического модулятора, состоящего из закрепленного на валу вращения
аэродромного приемного антенного устройства диска с прозрачностью изменяемой по синусоидальному закону перпендикулярно одному направлению, выход которого оптически связан с интегратором.
JИсточники информации,
принятые во внимание при экспертизе
1.Патент США № 3531801, кл. 343-15, опублик. 29.09.70.
2.Астафьев Г. П. и др. Радиотехнические средства нав1(гации летательных аппаратов.
.«Советское радио, 1962, гл. 9 (прототип).
Ш
/
ir ; /3
ФЦ2.1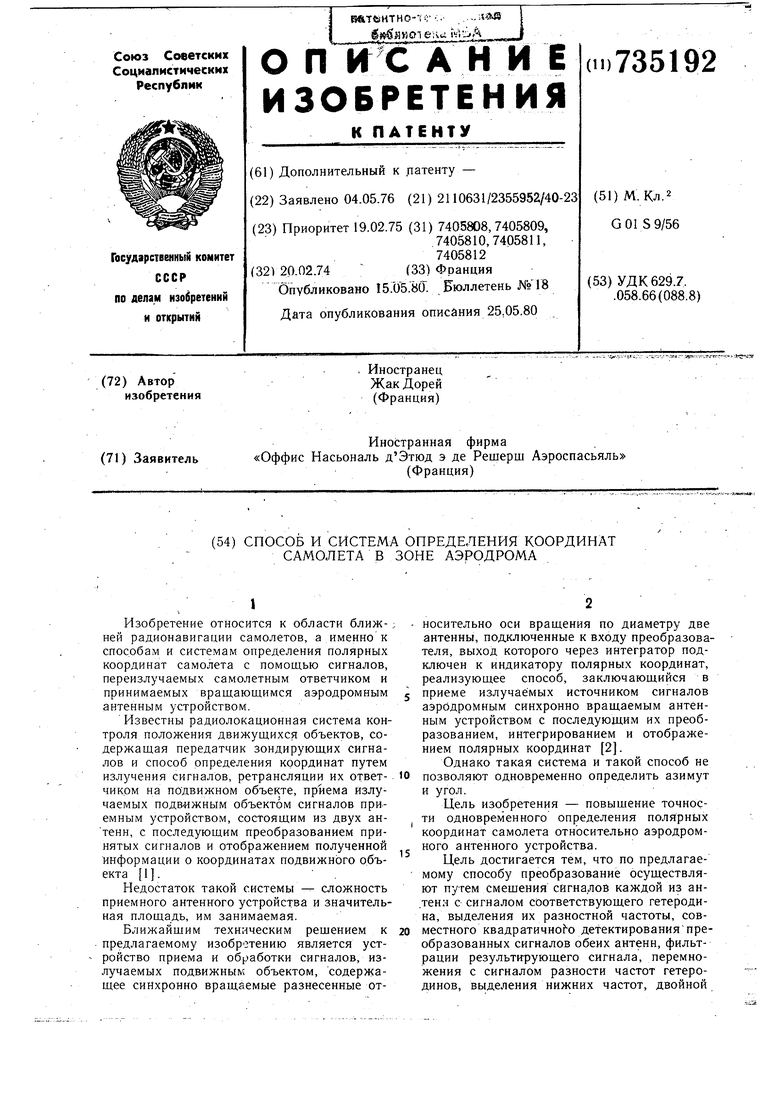
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1997 |
|
RU2122218C1 |
| Приемное устройство системы навигации летательного аппарата по радиосигналам маяков | 1976 |
|
SU709013A3 |
| Многофункциональный вертолетный радиоэлектронный комплекс | 2019 |
|
RU2736344C1 |
| КВАЗИМОНОИМПУЛЬСНЫЙ ВТОРИЧНЫЙ РАДИОЛОКАТОР | 2016 |
|
RU2622399C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2450363C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2313108C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2442186C1 |
| Вертолетный радиоэлектронный комплекс для мониторинга сельскохозяйственных угодий | 2018 |
|
RU2692117C1 |
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2000 |
|
RU2183329C1 |
| МОНОИМПУЛЬСНЫЙ ПРИЕМНИК ЗАПРОСЧИКА РАДИОИМПУЛЬСНЫХ СИГНАЛОВ С ЧАСТОТНО-ВРЕМЕННЫМ КОДИРОВАНИЕМ | 2010 |
|
RU2449305C1 |
/
