1
Изобретение относится к электротехнике, к области испытания электрических MaijjHH, а именно к автоматическим измерениям усредненных значений непрерывных электричс ских величин при исследованиях асинхронного режима синхронных машин с последующим построением зависимосгей, характиризуюших исслёдуемий режим, в функции от величины скольжения.Изобретение предназначено для испытания электрических машин на электрических станциях и при заводских стендовых испытаниях головных образцов генераторов и двигателей, а также использования предлагаемого способа в составе комплексных автоматизированных системах испытаний.
Известен способ получения асинхронных характеристик электрических машин, основанный на осциллографировании измеряемых характеристик в асинхронном решении работы электрической машины,на обработке осциллограмм, вычислении по известным аналитическим выражениям величин асинхронного момента, тока, можности в функции скольжения S и построении указанных характеристик 11.
Недостатки способа - трудоемкость, .штительност ;, ни:1кая производительность HcntJTaHV.n.
Известны устройства гл я измерения частоты (скольжения) активной мощности, напряжении, токов, содержащие блоки измерения и запоминания максимальных напряжений постоянного тока, блоки выпрягиления напряже10ний и токов, блоки измерения пло1цадей с помощью операционных усилителей, интеграторов.
Недостаток известных устройств ма.т1ая точность получаемой информа15ции , трудоемкость ее обработки.
В настоящее время существуют автоматизированные способы съема и обработки информации, получаемой в процессе испытаний злектрических
20 машин. Отличительной особенностью этих способов является то, что первичная информация получается путем высокочастотного программного опроса датчиков, регистрирующих
25 мгновенные значения периодически изменяющихся величин и непос.редственно преобразуется в код, а затем обрабатывается в ЭЦВМ 12). Отмечая преимущество такого способа в ско30рости измерения и пс.юграммного опроса датчиков в процессе гзроведени испытаний, следует отметить, что уже на стадии съема информации и поступления ее по каналам измерения -в машину возможен высокий угювень помех, так как полоса пропускания каналов, предназначенных для передачи мгновенных значений,должна быть широкой. Это обстоятельство оказывает значительное влияние на результат измерения и резко отклоняет его от значения, экстрапол15рованного по )дущим значениям. Вопрос помехозащищенности таких способов o6pa6oTKjH информации ягшяется узким местом, несмотря на принимаемые в алгоритмах меры JUIH получения достоверности результатов. Разработка специальных алгоритмов по дополнительной обработке результата измерения, имеющего признак недостоверности, лишь усложняет и без того саожное математическое обеспечение по обработке опытных данных в подобных системах испытания и резко увеличивает объем памяти машины. При измерении мгновенных значений периодически измеHHiotitHxcH параметров (определение коэффициента искажения кривой напряжения, измерения вибраций, скорости вращения ротора или фазы других, параметров относительно осей ротора и др.) возникающие сбои и отказы существенно влияют на достоверность измеряемой информации, а отсутствие достоверных данных о на чальной части переходного процесса с последующим выделением огибающих кривых {например при проведении опыта внезапного трехфазного короткого замыкания) достаточно для объявления всего опыта неудачным, Известен также способ автоматического испытания электрических машин, например синхронных, включающих измерение их характеристик, автоматическое интегрирование и усреднение полученных характеристи например, в мини-ЭВМ 3, Данный способ основан на регистрации мгновенных значений скорости, тока, напряжения, электрической, механической мощности, крутящего момента и температуры с- помощью быстродействующих точных датчиков, с выхода которых сигналы поступают через нормирующие усилители и фильтры (с быстродействием 25 ъ/т/с , через быстродействующий коммутатор на аналого-цифровой преобразователь. Далее информация в цифровом коде поступает на индикацию и для обработки в мини-ЭВМ, За счет специальных режимов работы нагрузочной системы нагрузочного двигателя (с поддержанием постоянства ускорения и тормо«ения) при обработке информации в мини-ЭВМ устраняется влияние.моментов инерции якоря и шкива на величну крутящего момента испытуемого двигателя, а за счет малой продолжительности (неско-пько с) всех испытаний влияние кагрева и вибраций считается несущественным,. Результаты обработки могут храниться на различных носителях информации и г выводиться в виде графиков и табли
Устройство для реализации извесного способа содержит канапы измерения токов и напряжений статора и ротора, активной мощности электрической машины, каждый из каналов снабжен датчиками первичной информации, подключенных через соответствующие операциок {ые усилители к входам интеграторов каналов, выходы которых соединены с входом элекронной вычислительной машины.
Недостатком известного способа и устройства для его регшизации -является ограниченная область применения .
Специфичность асинхронного режима синхронной машины заключается в том, что дпительность его протекания обусловлена периодом колебаний тока ротора, который при малых скольжениях может составлять несколько секунд, поэтому общая длительность испытаний определяется уровнем величины скольжения,
В известном способе длительност испытаний не зависит, от скольжения электрической машины, а следовате но этот способ и устройство для его реализации не могут быть исползованы ,для измерения асинхронных характеристик синхронной машины.
Цель изобретения - расилирение области применения на исследования асинхронных характеристик синхронных машин.
Для реализации поставленной цели в известнОМ способе измеряют скольж.ение ротора электрической машины, а время интегрирования выбирают равным
ип1
где Т S п
период тока сети,, с, скольжение ротора, целое число периодов колебаний тока ротора 1, 2, 3. Для реализации той же цели в устройство введен канал измерения скольжения ротора, с датчиком первичной информацииf операционным усилителем и интегратором на выходе канала, компаратор с блоком уставки и блок отключения входов интеграторов каналов, выход канала скольжения подключен к входу компаратора, выход которого соединен с блоком отключения входов интеграторов .
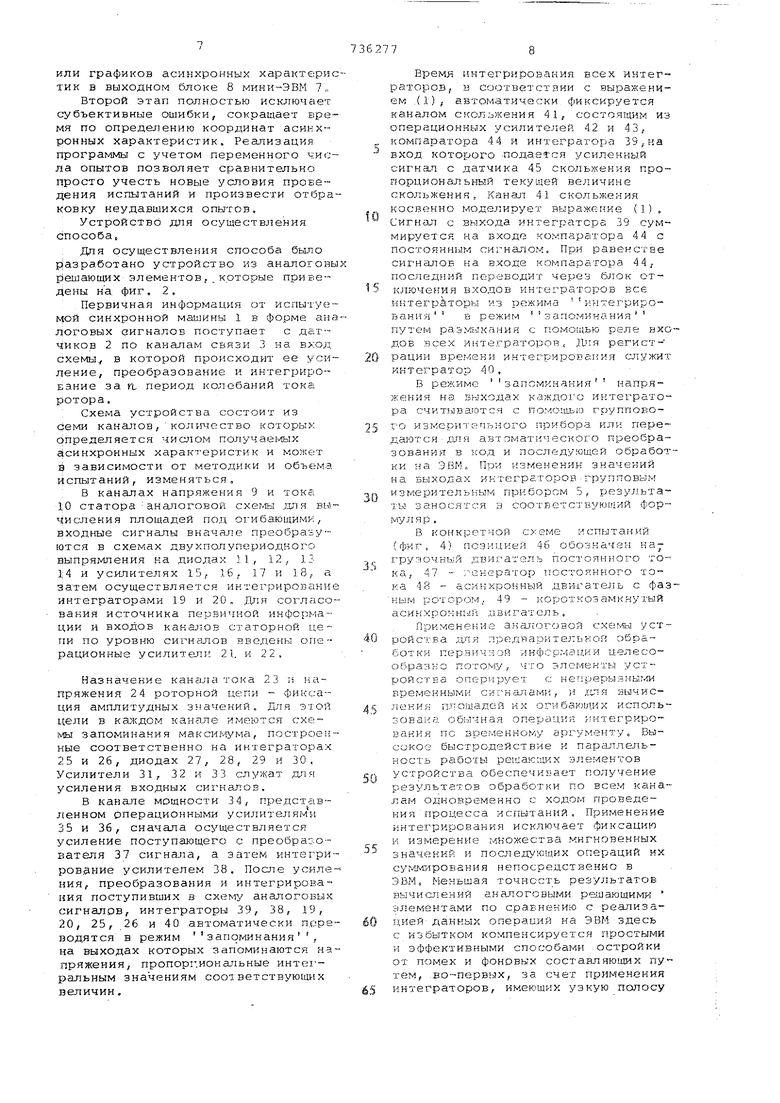
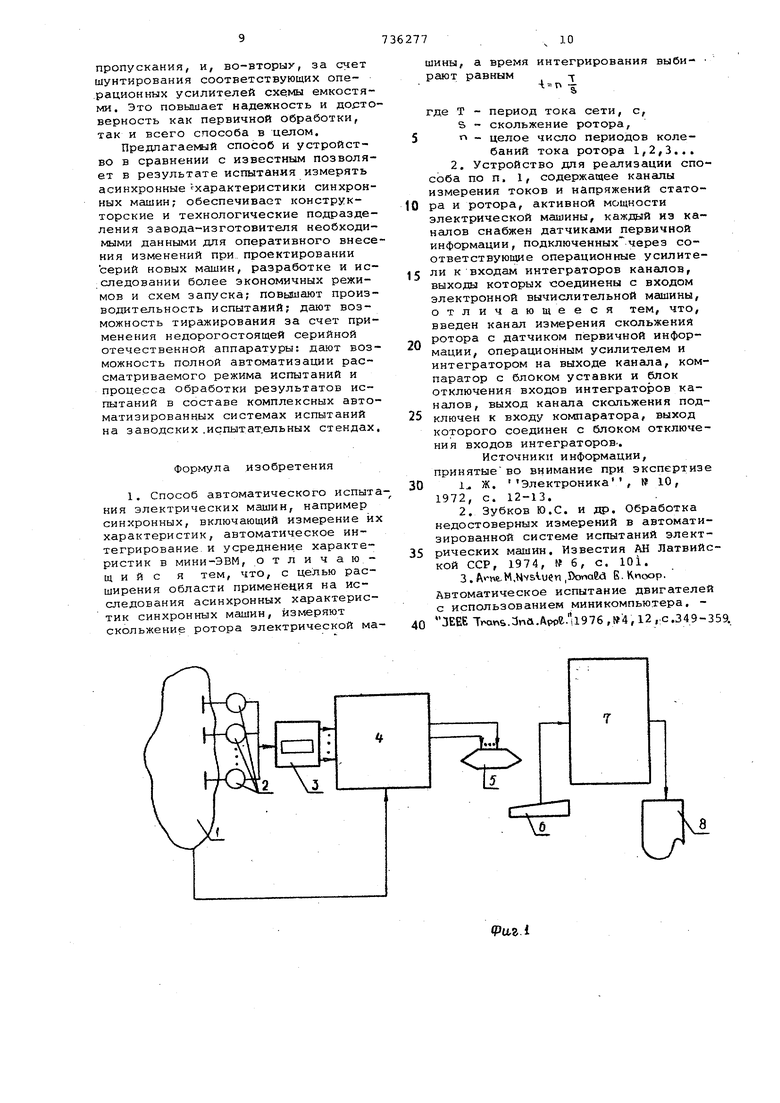
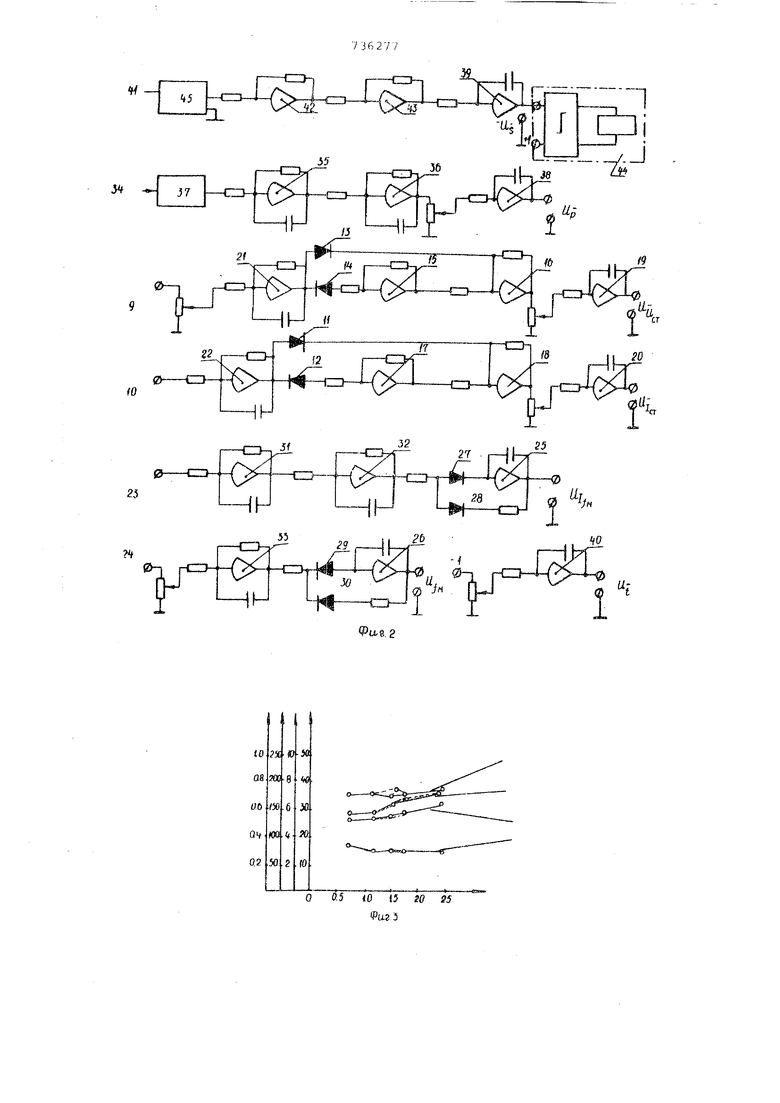
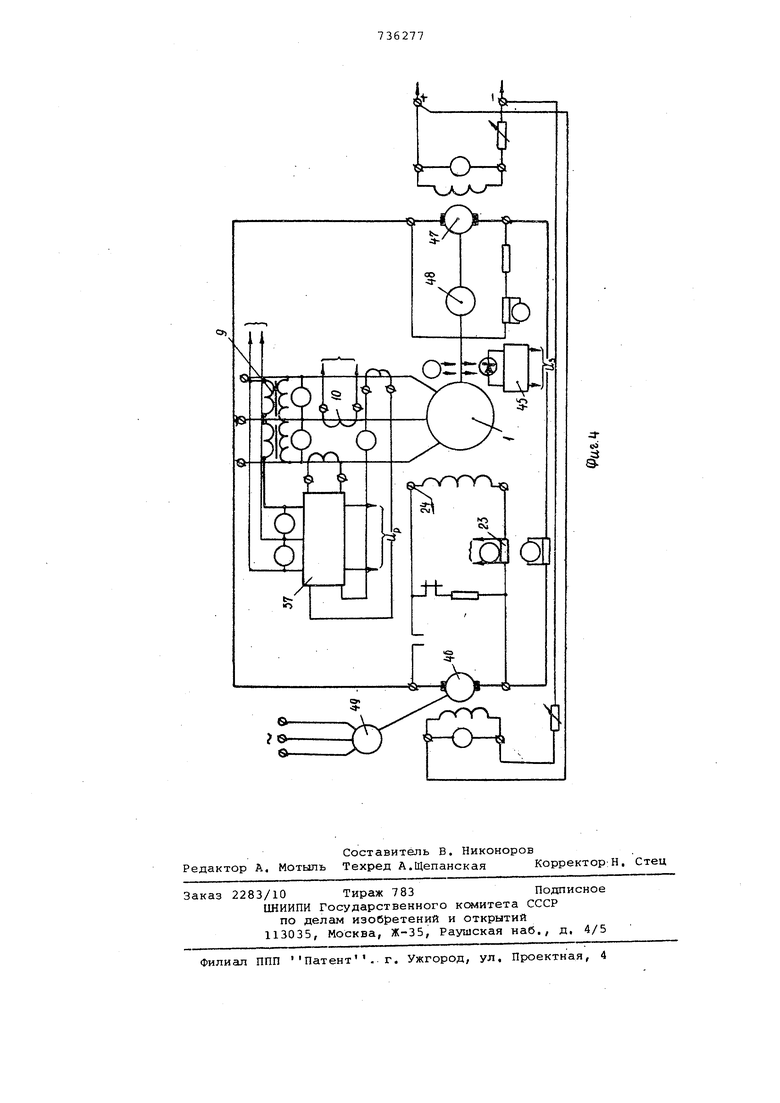
На фиг. 1 показана упрощенная элок-схема получения асинхронных характеристик синхронных машин пред ложенным способом; на фиг, 2 - аналоговая схема получения интегральных значений величин; на фиг. 3 асинхронные характеристики двигателя СД-75/8, полученные расчетом на ЭВМ и графо-аналитическим методом из осциллограмм; на фиг. 4 - пример принципиально схегф исследований одного из двигателей. Сущность способа получения асинхронных характеристик состоит в замене трудоемких ручных операций известного способа, таких как масштабирование, осциллографирование, обмер осциллограмм и вычисление площадей огибающих при определе нии интегральны : параметров и вели чины скольжения, одной автоматичес кой машинной операцией непрерывного, параллельного и одновременного интегрирования аналоговой первичной информации на первом этапе, а также автоматическое выполнение гро моздких аналитических расчетов при вычислении координат асинхронных характеристик по усредненным интег ральным параметрам по несложной программе на мини ЭВМ на втором этапе (этапы введены условно). Причем автоматическая машинная операция непрерывного, параллельно го и одновременного интегрирования осуществляется за время, связанное с величиной скольжения зависимостью t г - I где Т - период тока в сети, с, S - скольжение ротора, П - целое число периодов колебаний тока ротора 1, 2,,3. Интегральные параметры и величи на скольжения Т Т где Т-| - период тока ротора определяются за время, равное нескольким периодам п колебаний то ка ротора (Ьп Т-, ) с последующим усреднением интегральных параметров и скольжения за время, равное одно му периоду. В результате чего вели чины интегральных параметров должны функционально соответствовать определенной величине скольжения. Если изменяется величина скольжени изменяется период колебаний тока ротора Т-| , изменяются сами величины интегральных параметров. В пред лагаемом способе это требование ре лизуется каналом скольжения специального аналогового устройства (работа которого приводится дальше автоматически в зависимости от величины скольжения,. в соответствии с зависимостью (1), задающий интер вал интегрирования t . Приведенная на фиг. 1 блок-схема отражает материальную основу предполагаемого способа. Первичная информация: скольжение, потребляемая синхронной машиной 1 активная мощность, линейное напряжение и ток статорной обмотки, ток и напряженке обмоткиротора в виде аналогрвы,х сигналов поступает от датчиков 2 по каналам связи 3 на схему из аналоговых решающих элементов 4. Результаты интегральных параметров фиксируются в измерительном блоке 5. Таким образом, на данной части блок-схемы отражена материальная основа получения интегральных параметров за счет использования одной автоматической операции непрерывного, параллельного и одновременного интегрирования. В предлагаемом способе не требуется перед каждым испыта ием проведение операции масштабирования, так как она производится один раз в период наладки аналогового устройства и учитывается в программе для ЭВМ в виде постоянных масштабных коэффициентов. Расширен объем испытаний и введен контроль за регистрацией первичной информации и получения интегральных параметров непосредственно в ходе испытаний. Для этой цели при установившихся скольжениях производятся параллельные эксперименты с усреднением по сериям значений. Количество параллельных опытов в серии может быть произвольное, В известном спрсобе эта операция ограничена трудоемкостью и временем нахождения испытуемой машины на испытательном стенде. Поскольку в предлагаемом способе съем и обработка первичной информации происходят одновременно, то эти операции контролируются непосредственно в ходе испытаний. Обрыв любого датчика можно проконтролировать по rpynnoBONTy измерительному прибору. Случайные выбросы в значениях интегральных величин в сериях при установившемся уровне скольжения, также будут обнаружены при их фиксации. Указанные возможности способа повысили достоверность обработки результатов испытаний. На втором этапе интегральные значения с выходов интеграторов аналоговой схемы, как исходные данные, вводятся, через клавиатуру, перфоленту или непосредственно через внешние вводные устройства 6 в ЭВМ 7, в которой по программе введенная информация усредняется и обрабатывается с выдачей окончательных результатов вычисленийВ виде таблиц
или графиков асинхронных характ€;ристик в выходном блоке 8 мини-ЭВМ 7„
Второй этап полностью исключает субъективные ошибки, сокращает время по определению координат асикх-ронных характеристик. Реализация программы с учетом переменного чис;ла опытов позволяет сравнительно просто учесть новые условия проведения испытаний и произвести отбраковку неудавшихся опытов,
Устройство для осуществления способа.
Для осуществления способа бьто разработано устройство из аналоговы 1 ешающих элементов, которые приведены на фиг. 2,
Первичная информация от испытуемой синхронной машины 1 в форме аналоговых сигналов поступает с дс;Тчиков 2 по каналам связи 3 на вход схемы., в которой происходит ее усиление, преобразование и интегриро-вание за п, период колебаний тока ротора.
Схема устройства состоит из сземи каналов ,колггчество которых определяется числом получаег ых асинхронных характеристик и можегг и зависимости от методики и объема испытаний, изменяться, ; В каналах напряжения 9 и токс; 10 статора аналоговой схемы для вычисления площадей под огибающими, входные сигналы вначале прегобразуются в схемах двухполупериодного выпрямления на диодах 11, 12, 12 14 и усилителях IS, 16, 17 и 18., а затем осуществляется интегрирование интеграторами 19 и 20, Для согласовакия источника первичной информа-ции и входов каналов статорной цепи по уровню сигналов введены операционные усилител -: 21. и 22,
Назначение кангьча тока 23 и напряжения 24 роторной цепи - фиксация амплитудных значений. Для эюй цели в калсдом канале имеются схемы запоминания максимума, построег-:ные соответственно на интеграторах 25 и 26, диодах 27, 28, 29 и 30, Усилители 31, 32 и 33 служат дп .я усиления входных сигналов.
В канале мощности 34, представленном операционны.ми усилителяг п-i 35 и 36, сначала осуществляется усиление поступающего с преобразователя 37 сигнала, а затем интегрирование усилителем 38, После усилеНИН, преобразования и интегрирования поступивших в cxBMi аналоговых сигналов, интеграторы 39, 38, 19, 20, 25, 26 и 40 автоматически переводятся в режим запог шнания . на выходах которых запоминаются напряжения, nponopi-.иональные интегральным значениям соответствую1цих величин,
Время интегрирования всех интеграторов,, в соответствии с выра-жением ,(),- автоматически Фиксируется каналом скольжения 41, состоящим из операционных усилителей 42 и 43, компаратора 44 и интегратора 39,на вход которого Подаемся усиленный сигнап с датчика 45 скольхкения пропорционалbift-jK текущей величине С5 :ольжения, Канал 41 скольжения косвенно моделирует выражение (1), Сигнал с выхода интегратора 39 суммируется на входе компаратора 44 с постоянным сигналом. При рарзенстве сигналов к а входе компаратора 44, последний переводит через блок отключения входов интеграторов все интеграторы из режима интегриропутем размыкания с помощью реле входов всех инте.граторов , регистрации BpeMeHii интегрирования служит интегратор 40,
Б режиме запоминания напряже ния на SHXOjaax каждот/о интегратора считывэлотся с помощью группового измеритепьного прибора или передаются для автоматического преобразования в код и последующей обработки на ЭВМ;, При изменении значений на выходах иктегрг.торов групповым измерительным прибором 5, результаты заносятся в соответствующий Форь-и--ляр ,
В конкретной испытаний (фиг, 4) поз;-п.1иеи 46 обозкачен ка грузочный двигатель постоянного тока, 47 - гскератор постоянного тока 48 - асинхронный ддвигатель с ротором, 49 - ороткоэ амину тый асинхронный язигатель.
Применение aKajioroBOii схе.1Ы устройства для предварительной обработки первичной ;жфсрмации целесообразно потому, что элементы устройства onepvipyeT с непрерыйкыг-ш временными сиг-каламк, и для вычисления площадей их огибающих испсхпьзоваиа обычная операция интегрирования ПС временному аргументу. Высо-кое быстродействие и параллельность работы решакишх э гементов устройства обеспечивает получение результатов обработки по всем каналам одновременно с ходом проведения процесса испытаний. Применение интегрирования исключает фиксациг) и измерение мкожестза мнгновенных значений и последующих операций их сумг.лрОБания непосредственно в ЭВМ, Меньшая точность результатов вычи1:1лений аналоговыми решающими элемент-ами по сравнению с реализацией данных операций на ЭВМ здесь с избытком KOMneHCHpyeTcfj простыми и эффективными способами остройки от помех и фоновых составляющих путем, во-первых, за счет применения интеграторов, имеющих узкую полосу пропускания, и, во-вторых, за счет шунтирования соответствующих операционных усилителей схемы емкостями. Это повышает надежность и досто верность как первичной обработки, так и всего способа в целом, Предпагает ий способ и устройство в сравнении с известным позволяет в результате испытания измерять асинхронные характеристики синхронных машин; обеспечивает конструкторские и технологические подразделения завода-изготовителя необходимыми данными для оперативного внесе ния изменений при проектировании серий новых машин, разработке и ис;следовании более экономичных режимов и схем запуска; повышают производительность испытаний; дают возможность тиражирования за счет применения недорогостоящей серийной отечественной аппаратуры: дгиот воз можность полной автоматизации рассматриваемого режима испытаний и процесса обработки результатов испытаний в составе комплексных авто матизированных системах испытаний на заводских .испытат.ельных стендах Формула изобретения 1. Способ автоматического испыт ния электрических машин, например синхронных, включающий измерение их характеристик, автоматическое интегрирование и усреднение характеристик в мини-ЭВМ, отличаю,щ и и с я тем, что, с целью расширения области применения на исследования асинхронных характеристик синхронных машин, измеряют скольжение ротора электрической ма шины, а время интегрирования выбирают равным где Т - период тока сети, с, S скольжение ротора, - целое число периодов колебаний тока ротора 1,2,3,,. 2, Устройство для реализации способа по п. 1, содержащее каналы измерения токов и напряжений статора и ротора, активной мощности электрической машины, каждый из каналов снабжен датчиками первичной информации, подключенных через соответствующие операционные усилители к входам интеграторов каналов, выходы которых соединены с входом электронной вычислительной машины, отличающееся тем, что, введен канал измерения скольжений ротора с датчиком первичной информации, операционным усилителем и интегратором на выходе канала, компаратор с блоком уставки и блок отключения входов интеграторов каналов, выход канала скольжения подключен к входу компаратора, выход которого соединен с блоком отключения входов интеграторов-. Источники информации, принятыево внимание при экспертизе 1 Ж, Электроника, № 10, 1972, с. 12-13, 2,Зубков Ю.С, и Щ). Обработка недостоверных измерений в автоматизированной системе испытаний электрических машин. Известия АН Латвийской ССР, 1974, 6, с. 101, 3.Av-nu.M,Hvs. ,5) E.Knoop. Автоматическое испытание двигателей с использованием миникомпьютера, ,b.3nu.Appa.il976,4,12 ,:с,349-359. yt 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения электромагнитных постоянных времени обмоток синхронной электрической машины | 1983 |
|
SU1144061A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНДУКТИВНОСТИ РАССЕЯНИЯ ФАЗЫ ОБМОТКИ СТАТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2422839C1 |
| СПОСОБ СПЕКТРАЛЬНЫХ ИЗМЕРЕНИЙ И СПЕКТРОФОТОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2145062C1 |
| Способ косвенного контроля неравномерности воздушного зазора асинхронного двигателя | 1980 |
|
SU900226A1 |
| Автоматический регулятор возбуждения для асинхронного электродвигателя с фазным ротором | 1980 |
|
SU928595A1 |
| Способ регулирования частоты резонансного инвертора | 1988 |
|
SU1690133A1 |
| МОДУЛЬНАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2009 |
|
RU2394339C1 |
| Устройство для выявления повреждений ротора синхронной машины | 1991 |
|
SU1814134A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Способ определения первичных параметров режима работы машины циклического действия и устройство для его осуществления | 1990 |
|
SU1760399A1 |
10
}Ч
as
т
06 т
Q4
изо
50
Q2
О 0.5 iO 15 SO 55
Фигз
