Изобретение относится к области определения первичных параметров машины циклического действия и может быть использовано при испытаниях на стендах или в процессе эксплуатации в различных областях промышленности.
Известен способ определения КПД насоса (а.с CCCPNH101585A, G 01 L 3/26), по которому путем прокачки рабочего тела через насос, измерения давления и температуры, на входе и выходе из насоса часть рабочего тела после выхода из насоса дросселируют по давлению на входе, а температуру на выходе из насоса определяют в дросселир,ова«ном потоке и по измеренным параметрам вычисляют КПД
Данный способ не обеспечивает требуемой точности определения КПД так как не компенсирует погрешность вызванную автоколебательными процессами во время работы оборудования под нагрузкой.
Известен также способ определения КПД редуктора 1, заключающийся в измерении крутящего момента на приводе редуктора и его нагружателе, где в качестве привода и нагружателя используют гидросистему Причем сначала измеряют крутящие моменты на приводе и нагружателе по величине давления в напорных линиях гидросистемы при работе образцового редуктора, после чего измеряют также параметры при работе испытуемого редуктора, а КПД определяют по математической зависимости.
Однако данный способ требует образцового оборудования, механической замены оборудования и также не учитывает влияние автоколебаний гидросистемы на точность измерения параметров
Os О
%
О
Наиболее близким по технической сущности и достигаемому эффекту к изобретению являются способ и система контроля эффективности трубопроводной системы 2.
Система для транспортировки текучего материала содержит распределительную магистраль и ряд насосных станций, которые расположены вдоль магистрали на расстоянии друг от друга и обеспечивают движение материала. На каждой станции имеется несколько насосов, подключенных к магистрали, и соответствующее число двигателей, выходные валы которых соединены насосами и управляют их работой. При контроле рабочего состояния системы на каждой одновременно определяют входные параметры, к которым относятся скорости вращения двигателей, их выходные моменты и величины мощностей, потребляемых двигателей. По указанным параметрам вычисляют выходную мощность каждого двигателя и КПД, определяемый через величины входной и выходной мощностей. Полученные коэффициенты сравнивают между собой, выбирая двигатель, работающий с максимальной эффективностью. Результат отображается на индикаторе.
Однако этот способ и система не обеспечивают высокой точности определения КПД из-за отсутствия автоматической компенсации погрешности определения КПД. вызванной возникающими в магистрали транспортировки текучего материала автоколебаниями, и отсутствия автоматического разделения переходного и установившегося режимов при измерение параметров.
Наиболее близким по технической сущности и достигаемому эффекту устройством для реализации предлагаемого способа является устройство для регистрации режимов работы двигателя (а.с. СССР № 1420396, кл, G 01 L 3/24), содержащее генератор, датчик хода рейки топливного насоса высокого Давления, датчик частоты вращения коленчатого вала двигателя, блок управления и матричный блок счетчиков. Для повышения точности регистрации путем дифференциации установившегося в неустановившегося режимов работы устройство дополнительно снабжено четырьмя пиковыми детекторами, двумя блоками вычисления средней величины, двумя блоками вычисления среднеквадратического отклонения, двумя блоками вычисления относительной величины отклонения, двумя блоками ключей, счетчиком времени работы на неустановившемся режиме, элементами 2ИЛИ, 2И, ЗИ и двумя элемента НЕ. В данном устройстве при измерении параметров исключается режим работы двигателя в неустановившемся режиме.
Данное устройство также не обеспечивает достаточной точности регистрации измеряемых параметров, так как не устраняет погрешность определения КПД машин, работающих в автоколебательном режиме, в установившемся состоянии.
Целью изобретения является повышение точности определения первичных параметров машины циклического действия,
работающей в автоколебательном режиме под нагрузкой, за счет повышения точности измерения выходных сигналов.
Цель достигается тем, что, регистрируя выходные сигналы соответствующих датчиков, по которым определяют величины первичных параметров, дополнительно по одному из регистрируемых выходных сигналов измеряют период автоколебаний, а величину первичных параметров определяют
интегрированием из текущих значений в течение времени, кратного периоду автоколебаний.
Интегрирование значений измеряемых сигналов и определение по этим значениям
первичных параметров машины циклического действия широко известны. Практически при любом измерении проводится интегрирование регистрируемого сигнала в течение времени измерения сигнала. Однако автоматическое определение периода атоколебаний в системе определения первичных параметров машины циклического действия и одновременное интегрирование всех измеряемых параметров за время,
кратное периоду автоколебаний, неизвестны.
Регистрирование выходных гигнзлов j соответствии с указанными выше отличитель ными признаками позволяет повысить точность определения первичных параметров машины циклического действия. Положительный эффект при этом обеспечивается следующим образом.
Конструкция машины циклического
действия, наличие различий в объемах внутренних цилиндров и конечная жесткость со- единительных рукавов, по которым транспортируется рабочее тело, вызывают колебания в системе определения первичных параметров машины циклического действия. Поскольку причины возникновения колебаний не определяются режимами работы машин, а колебания присутствуют в любых режимах работы, то колебания в ус5 тановившимся режиме работы являются автоколебательными.
Автоколебаниям подвержены все выходные сигналы, необходимые для определения первичных параметров, причем они
могут иметь различную с -тплитуду, но их
периоды в определенном установившемся режиме одинаковы, а характер гармонический, Однако вследствие инерционности элементов гидропривода и временных задержек в соединительных рукавах фазы колебаний по измеряемым сигналам различны. Мгновенное измерение выходных сигналов без учета сдвига фаз автоколебаний ведет к погрешности определения средних значений сигналов и, следовательно, к погрешности регистрации первичных параметров машины циклического действия.
В частном случае КПД гидронасоса можно определить следующим образом:
Рнас Npac
ni V0(1)
Мнас Мнас
где Мнас - обороты на валу гидронасоса;
Мнас - момент сил на валу гидронасоса;
Рнас давление на выходе гидронасоса;
Npac - обороты расходомера;
Vo - рабочий объем расходомера (constant).
Погрешность, вызванная автоколебаниями выходных сигналов при их мгновенном измерении, равна
т
P-..Oi4NpMf1SIH(ol«l
AW4ac(SINM))H-0,4NHotJlSl4(wbc
5
Выражение (2) при этом при
ТпТп
Кас ФрасЛ
оО
С учетом того, что в устан
режиме, а первичные параметры
15 ют только в установившемся р
выходные сигналы постоянны,
(3) приводится к виду
«WW Шл
20
Ь V
62 °
WHO.-N,
О°-у
т„ т„ -V
нас нас Jttt-jdt ° с.
Погрешность, вызванная авт 25 ями гидропривода при этом Дп что и обеспечивает положительн
Дп - п1 - п2
VQ Рнас Npac у f Рнас + АРнас sin (f ))( Npac -h Дмрас sin (у% )) ° Мнас Мнас° ( Мнас + АМнас sin ДО ) ) ( Мнас + ДМнас sin (i/M ))
т
P-..Oi4NpMf1SIH(ol«l,Wl.Oj
AW4ac(SINM))H-0,4NHotJlSl4(wbcf«l H.O
Выражение (2) при этом принимает вид
ТпТп
Кас ФрасЛ
оО
С учетом того, что в установившемся
режиме, а первичные параметры определяют только в установившемся режиме, все
выходные сигналы постоянны, выражение
(3) приводится к виду
«WW Шл ,
Ь V
62 °
WHO.-N,
О°-у
т„ т„ -V
нас рас
нас нас Jttt-jdt ° с.
Погрешность, вызванная автоколебани- ями гидропривода при этом Дп щ - П2 О, что и обеспечивает положительный эффект,

| название | год | авторы | номер документа |
|---|---|---|---|
| Система для регистрации режимов работы двигателя | 1987 |
|
SU1536223A2 |
| Устройство для регистрации режимов работы двигателя | 1989 |
|
SU1719939A2 |
| Устройство для диагностики состояния подшипника качения | 1990 |
|
SU1767377A1 |
| Устройство для определения средней глубины микронеровностей | 1984 |
|
SU1232938A1 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ ПРОЦЕССОМ ВЫРАЩИВАНИЯ РАСТЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2282979C1 |
| Устройство для измерения давления | 1990 |
|
SU1831668A3 |
| Устройство для определения прозрачности сырьевого потока | 1991 |
|
SU1801622A1 |
| СПОСОБ СТАБИЛИЗАЦИИ И КОРРЕКТИРОВКИ КОЭФФИЦИЕНТА ПЕРЕДАЧИ СЦИНТИЛЛЯЦИОННОГО ДЕТЕКТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445648C2 |
| Устройство определения времени прихода оптического сигнала | 2017 |
|
RU2663881C1 |
| Устройство для определения показателей гемодинамики | 1989 |
|
SU1828740A1 |
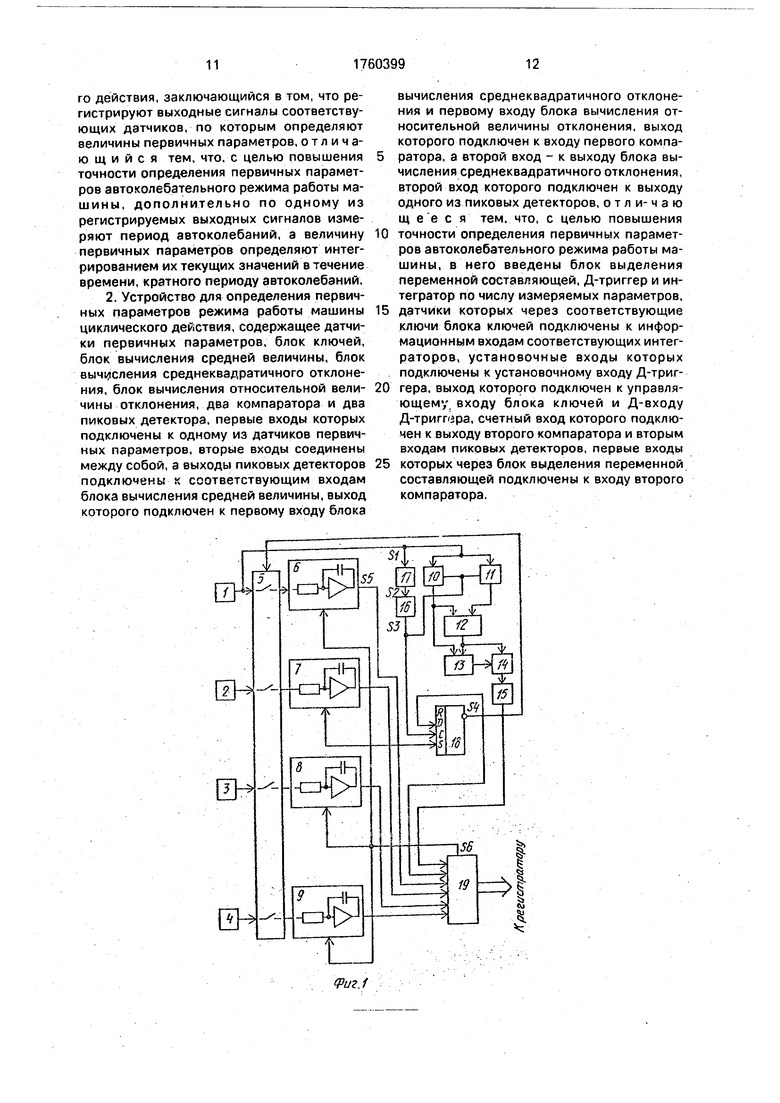
Использование: определение первичных параметров режима работы машин циклического действия при диагностических испытаниях Сущность изобретения: по одному из регистрируемых выходных сигналов датчиков первичных параметров измеряют период автоколебаний, а величину первичных параметров определяют интегрированием их текущих значений в течение времени, кратного периоду автоколебаний. Устройство для реализации способа содержит датчики 1-4 первичных параметров, блок 5 ключей, интеграторы 6-9, пиковые детекторы 10, 11, блок 12 вычисления средней величины, блок 13 вычисления среднеквадратичного отклонения, блок 14 вычисления относительной величины отклонения, компараторы 15, 16, блок 17 выделения переменной составляющей, 1 Д- триггер 18 и вычислительный блок 19. 2 с п. ф-лы, 2 ил.
где АРнас Asln (), A N pac sin fyfi). A Мнас sin (p3), AN нас sin (0) -погрешности измеряемых сигналов, вызванные сдвигом фаз автоколебаний гидропривода Ol ( ДО .,). Очевидно, что различие в фазах регистрируемых сигналов ведет к погрешностям их определения и, как следствие, к погрешности определения первичных параметров машины циклического действия.
В соответствии с заявляемым способом определяется период автоколебаний Т одного измеряемого сигнала и все измеряемые сигналы интегрируются в течение времени Тп, где п - любое целое число. Вы- ражение (1) при этом будет
9 V
tl о
(T| ac IU1fbPMe5tH(cjt 4 tKfnp UUt)P°cSIHM cit)
„(dt bM siHtal tHjH Jt M SiHH i)
Поскольку интервал интегрирования в соответствии с заявляемым способом задает- ся кратным нескольким периодам автоколебаний выходных сигналов в установившемся режиме Тп (2 п л)/ сд то погрешность измерения сигналов уменьшается, так как
0 5
0
5
0
выражающийся в повышении точности определения первичных параметров машины циклического действия.
Таким образом, отмеченные выше отличительные признаки являются существенными.
Цель устройства как реализации способа достигается тем, что в устройство, содержащее датчики первичных параметров, блок ключей, блок вычисления средней величины, блок вычисления среднеквадратичного отклонения, блок вычисления относительной величины отклонения, два компаратора и два пиковых детектора, первые входь1 которых подключены к одному из датчиков первичных параметров, вторые входы соединены между собой, а выходы подключены к соответствующим входам блока вычисления средней величины, выход которого подключен к первому входу блока вычисления среднеквадратичного отклонения и к первому входу блока относительной величины от клонения, выход которого подключен к входу первого компаратора, а второй вход - к выходу блока вычисления среднеквадратичного отклонения, второй вход которого подключен к выходу одного из пиковых детекторов, дополнительно включены блок вы- деления переменной составляющей
D-триггер и интеграторы по числу измеряемых параметров, датчики которых через со- ответствующие ключи блока ключей подкпючены к информационным входам соответствующих интеграторов, установочные входы которых подключены к установочному входу D-триггера, выход которого подключен к управляющему входу блока ключей и к D-входу D-триггера, счетный вход которого подключен к выходу второго компаратора и к вторым входам пиковых детекторов, первые входы которых через блок выделения переменной составляющей подключены к входу второго компаратора,
Применение интеграторов с установочными входами широко известно (а.с. № И44709, кл. G 05 В 11/30 и др). Неизвестным является использование интеграторов для одновременного интегрирования регистрируемых сигналов в течение автоматически определяемого еремени. Неизвестны связи интеграторов с другими объектами заявляемого устройства, а также связи и взаимосвязи других объектов.
Широко известно применение D-триггера в счетном режиме, но его связи с другими объектами заявляемого устройства неизвестны.
Таким образом, указанные отличительные признаки заявляемого устройства являются существенными и обеспечивают повышение точности определения первичных параметров машины циклического действия за счет реализации нового, неизвестного ранее,способа.
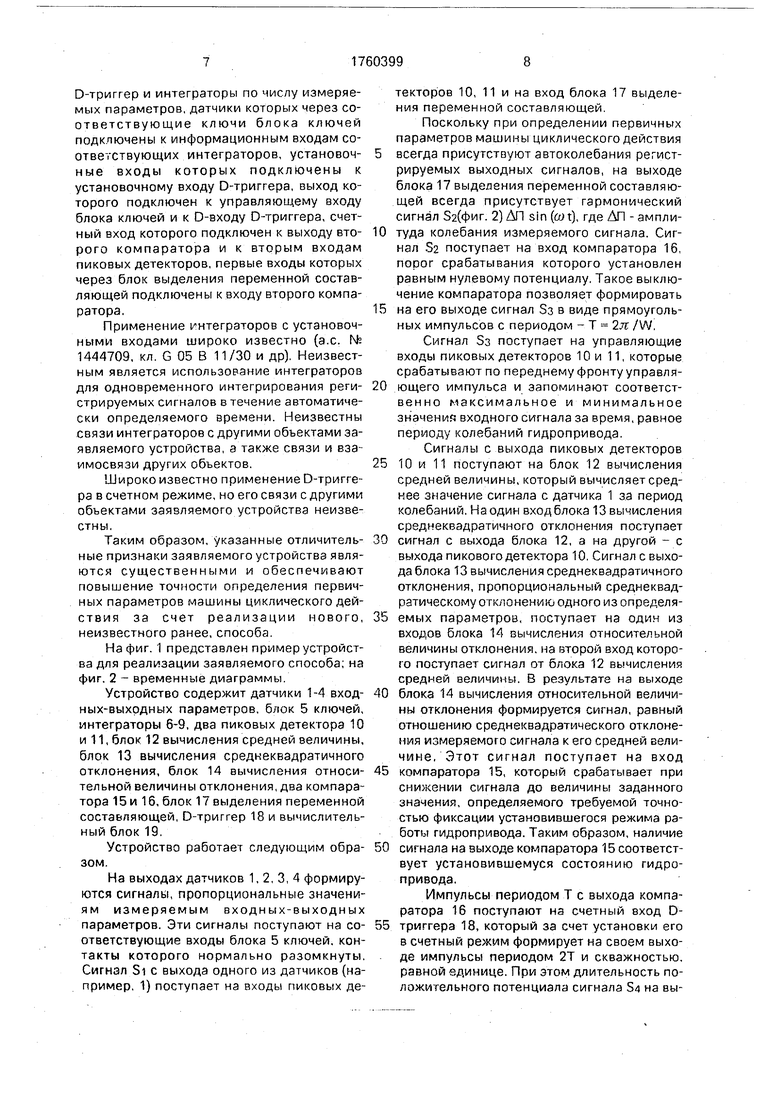
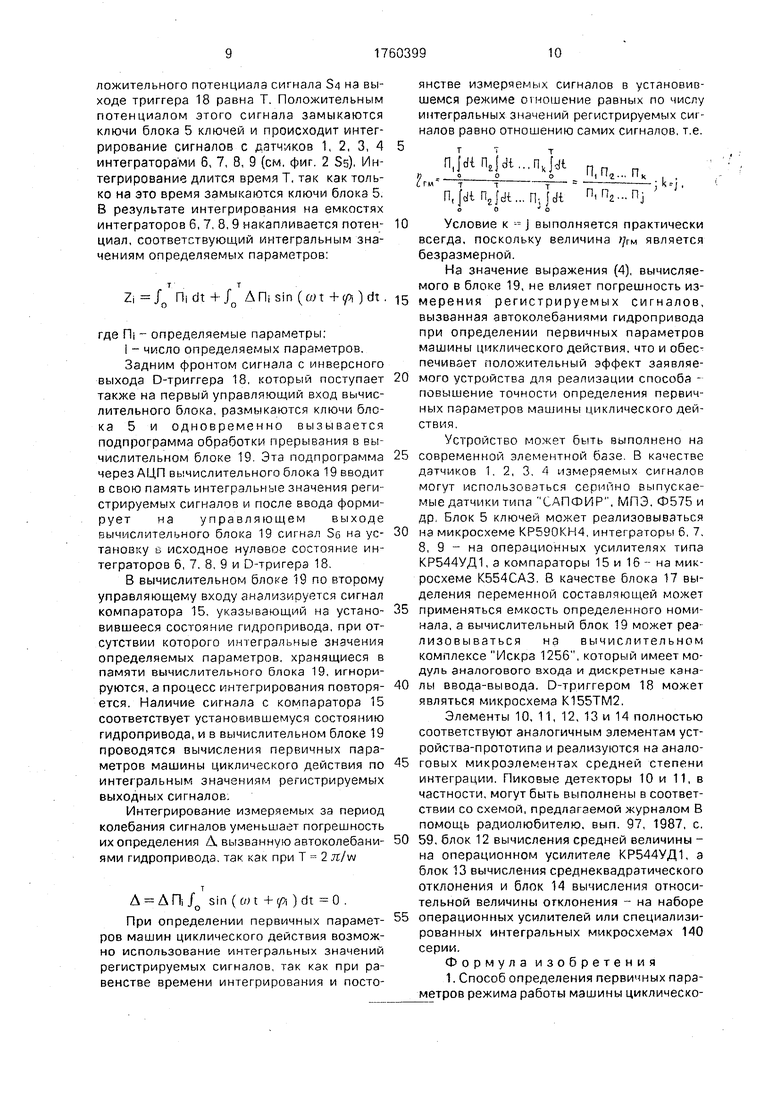
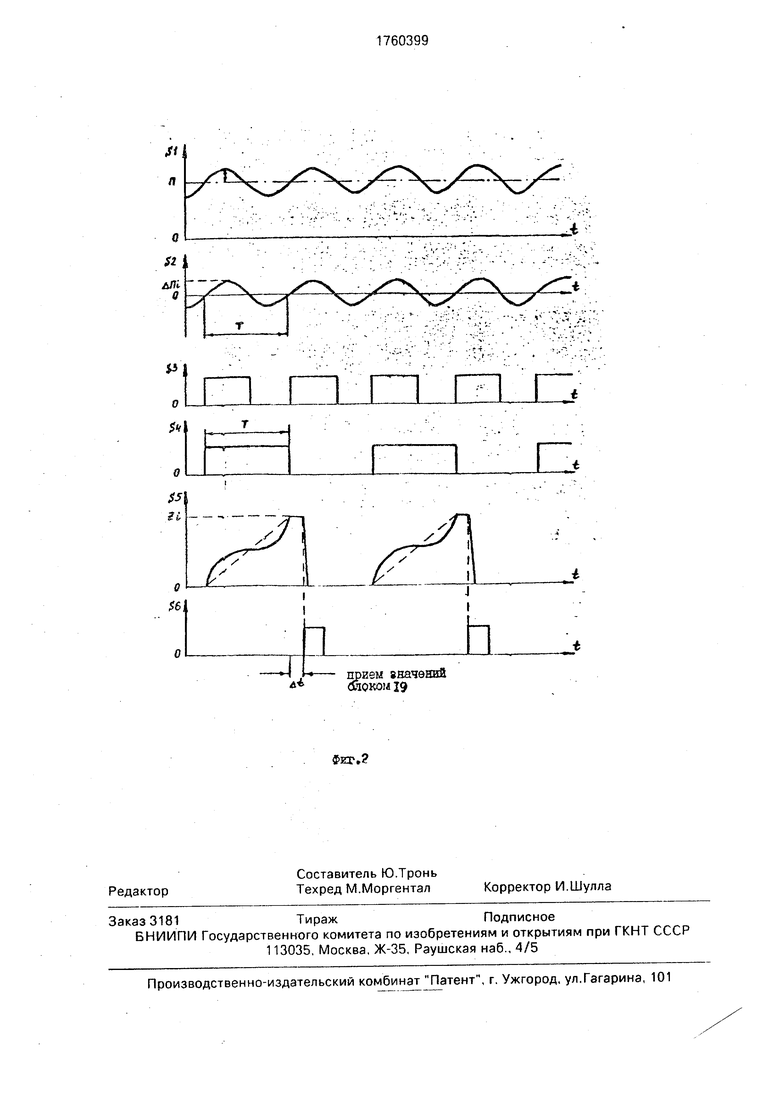
На фиг. 1 представлен пример устройства для реализации заявляемого способа; на фиг. 2 - временные диаграммы.
Устройство содержит датчики 1-4 входных-выходных параметров, блок 5 ключей, интеграторы 6-9, два пиковых детектора 10 и 11, блок 12 вычисления средней величины, блок 13 вычисления среднеквадратичного отклонения, блок 14 вычисления относительной величины отклонения, два компаратора 15 и 16, блок 17 выделения переменной составляющей, D-триггер 18 и вычислительный блок 19.
Устройство работает следующим образом.
На выходах датчиков 1,2,3,4 формируются сигналы, пропорциональные значениям измеряемым входных-выходных параметров. Эти сигналы поступают на соответствующие входы блока 5 ключей, контакты которого нормально разомкнуты. Сигнал Si с выхода одного из датчиков (например, 1) поступает на входы пиковых детекторов 10, 11 и на вход блока 17 выделения переменной составляющей
Поскольку при определении первичных параметров машины циклического действия
всегда присутствуют автоколебания регистрируемых выходных сигналов, на выходе блока 17 выделения переменной составляющей всегда присутствует гармонический сигнал $2(фиг. 2) ДП sin (cot), где ДП -амплитуда колебания измеряемого сигнала. Сигнал S2 поступает на вход компаратора 16. порог срабатывания которого установлен равным нулевому потенциалу. Такое выключение компаратора позволяет формировать
на его выходе сигнал Зз в виде прямоугольных импульсов с периодом - Т 2л: /W.
Сигнал Зз поступает на управляющие входы пиковых детекторов 10 и 11, которые срабатывают по переднему фронту управляющего импульса и запоминают соответственно максимальное и минимальное значений входного сигнала за время, равное периоду колебаний гидропривода.
Сигналы с выхода пиковых детекторов
10 и 11 поступают на блок 12 вычисления средней величины, который вычисляет среднее значение сигнала с датчика 1 за период колебаний. На один вход блока 13 вычисления среднеквадратичного отклонения поступает
сигнал с выхода блока 12, а на другой - с выхода пикового детектора 10. Сигнал с выхода блока 13 вычисления среднеквадратичного отклонения, пропорциональный среднеквад- рзтическому отклонению одного из определяемых параметров, поступает нэ один из входов блока 14 вычисления относительной величины отклонения, на второй вход которого поступает сигнал от блока 12 вычисления средней величины. В результате на выходе
блока 14 вычисления относительной величины отклонения формируется сигнал, равный отношению среднеквадратического отклонения измеряемого сигнала к его средней величине, Этот сигнал поступает на вход
компаратора 15, который срабатывает при снижении сигнала до величины заданного значения, определяемого требуемой точностью фиксации установившегося режима работы гидропривода. Таким образом, наличие
сигнала на выходе компаратора 15 соответствует установившемуся состоянию гидропривода.
Импульсы периодом Т с выхода компаратора 16 поступают на счетный вход D5 триггера 18, который за счет установки его в счетный режим формирует на своем выходе импульсы периодом 2Т и скважностью, равной единице. При этом длительность положительного потенциала сигнала SA на выложительного потенциала сигнала S4 на выходе триггера 18 равна Т. Положительным потенциалом этого сигнала замыкаются ключи блока 5 ключей и происходит интегрирование сигналов с датчиков 1, 2, 3, 4 интеграторами 6, 7, 8, 9 (см, фиг. 2 Sg). Интегрирование длится время Т, так как только на это время замыкаются ключи блока 5. В результате интегрирования на емкостях интеграторов 6, 7, 8, 9 накапливается потенциал, соответствующий интегральным значениям определяемых параметров:
тт
riidt+/0 Af1j sin (wt )dt,
где fli - определяемые параметры;
i - число определяемых параметров.
Задним фронтом сигнала с инверсного выхода D-триггера 18, который поступает также на первый управляющий вход вычислительного блока, размыкаются ключи блока 5 и одновременно вызывается подпрограмма обработки прерывания в вычислительном блоке 19. Эта подпрограмма через АЦП вычислительного блока 19 вводит в свою память интегральные значения регистрируемых сигналов и после ввода формирует на управляющем выходе вычислительного блока 19 сигнал Зб на установку в исходное нулевое состояние интеграторов 6, 7, 8, 9 и D-тригера 18.
В вычислительном блоке 19 по второму управляющему входу анализируется сигнал компаратора 15, указывающий на установившееся состояние гидропривода, при отсутствии которого интегральные значения определяемых параметров, хранящиеся в памяти вычислительного блока 19, игнорируются, а процесс интегрирования повторяется. Наличие сигнала с компаратора 15 соответствует установившемуся состоянию гидропривода, и в вычислительном блоке 19 проводятся вычисления первичных параметров машины циклического действия по интегральным значениям регистрируемых выходных сигналов.
Интегрирование измеряемых за период колебания сигналов уменьшает погрешность их определения Д вызванную автоколебаниями гидропривода, так как при Т 2 я/w
Д ДП|/о sin (wt +ip )dt 0 .
При определении первичных параметров машин циклического действия возможно использование интегральных значений регистрируемых сигналов, так как при равенстве времени интегрирования и постоянстве измеряемых сигналов в установившемся режиме 01 ношение равных по числу интегральных значений регистрируемых сигналов равно отношению самих сигналов, т.е.
т тт
njcrin t... Пп
П . ... оо о11,112.., Пк(
С ги 7Т т i K-J
lUdt njdt... П-, U П, П2... Rj
оОJ о
0Условие к -- I выполняется практически
всегда, поскольку величина /Дм является безразмерной.
На значение выражения (4), вычисляемого в блоке 19, не влияет погрешность из5 мерения регистрируемых сигналов, вызванная автоколебаниями гидропривода при определении первичных параметров машины циклического действия, что и обеспечивает положительный эффект заявляе0 мого устройства для реализации способа - повышение точности определения первичных параметров машины циклического действия.
Устройство может быть выполнено на
5 современной элементной базе. В качестве датчиков 1, 2, 3, 4 измеряемых сигналов могут использоваться серийно выпускаемые датчики типа САПФИР, МПЗ, Ф575 и др. Блок 5 ключей может реализовываться
0 на микросхеме КР590КН4, интеграторы 6, 7, 8, 9 - на операционных усилителях типа КР544УД1, а компараторы 15 и 16 - на микросхеме К554САЗ. В качестве блока 17 выделения переменной составляющей может
5 применяться емкость определенного номинала, а вычислительный блок 19 может реализовываться на вычислительном комплексе Искра 1256, который имеет модуль аналогового входа и дискретные кана0 лы ввода-вывода. D-триггером 18 может являться микросхема К155ТМ2.
Элементы 10, 11, 12,13 и 14 полностью соответствуют аналогичным элементам устройства-прототипа и реализуются на анало5 говых микроэлементах средней степени интеграции. Пиковые детекторы 10 и 11, в частности, могут быть выполнены в соответствии со схемой, предлагаемой журналом В помощь радиолюбителю, вып. 97, 1987, с.
0 59, блок 12 вычисления средней величины - на операционном усилителе КР544УД1, а блок 13 вычисления среднеквадратического отклонения и блок 14 вычисления относительной величины отклонения - на наборе
5 операционных усилителей или специализированных интегральных микросхемах 140 серии.
Формула изобретения 1. Способ определения первичных параметров режима работы машины циклического действия, заключающийся в том, что регистрируют выходные сигналы соответствующих датчиков, по которым определяют величины первичных параметров, отличающийся тем, что, с целью повышения точности определения первичных параметров автоколебательного режима работы ма- шины, дополнительно по одному из регистрируемых выходных сигналов измеряют период автоколебаний, а величину первичных параметров определяют интегрированием их текущих значений в течение времени, кратного периоду автоколебаний. 2. Устройство для определения первичных параметров режима работы машины циклического действия, содержащее датчики первичных параметров, блок ключей, блок вычисления средней величины, блок вычисления среднеквадратичного отклонения, блок вычисления относительной вели- чины отклонения, два компаратора и два пиковых детектора, первые входы которых подключены к одному из датчиков первичных параметров, вторые входы соединены между собой, а выходы пиковых детекторов подключены к соответствующим входам блока вычисления средней величины, выход которого подключен к первому входу блока
вычисления среднеквадратичного отклонения и первому входу блока вычисления относительной величины отклонения, выход которого подключен к входу первого компаратора, а второй вход - к выходу блока вычисления среднеквадратичного отклонения, второй вход которого подключен к выходу одного из пиковых детекторов, о т л и- ч а ю щ е е с я тем, что, с целью повышения точности определения первичных параметров автоколебательного режима работы машины, в него введены блок выделения переменной составляющей, Д-триггер и интегратор по числу измеряемых параметров, датчики которых через соответствующие ключи блока ключей подключены к информационным входам соответствующих интеграторов, установочные входы которых подключены к установочному входу Д-триг- гера. выход которого подключен к управляющему входу блока ключей и Д-входу Д-тригпзра, счетный вход которого подключен к выходу второго компаратора и вторым входам пиковых детекторов, первые входы которых через блок выделения переменной составляющей подключены к входу второго компаратора.
f 1 л
з
о $ч
прием 8начений блоком 19
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения КПД редуктора | 1984 |
|
SU1229614A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США №4584654 | |||
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
