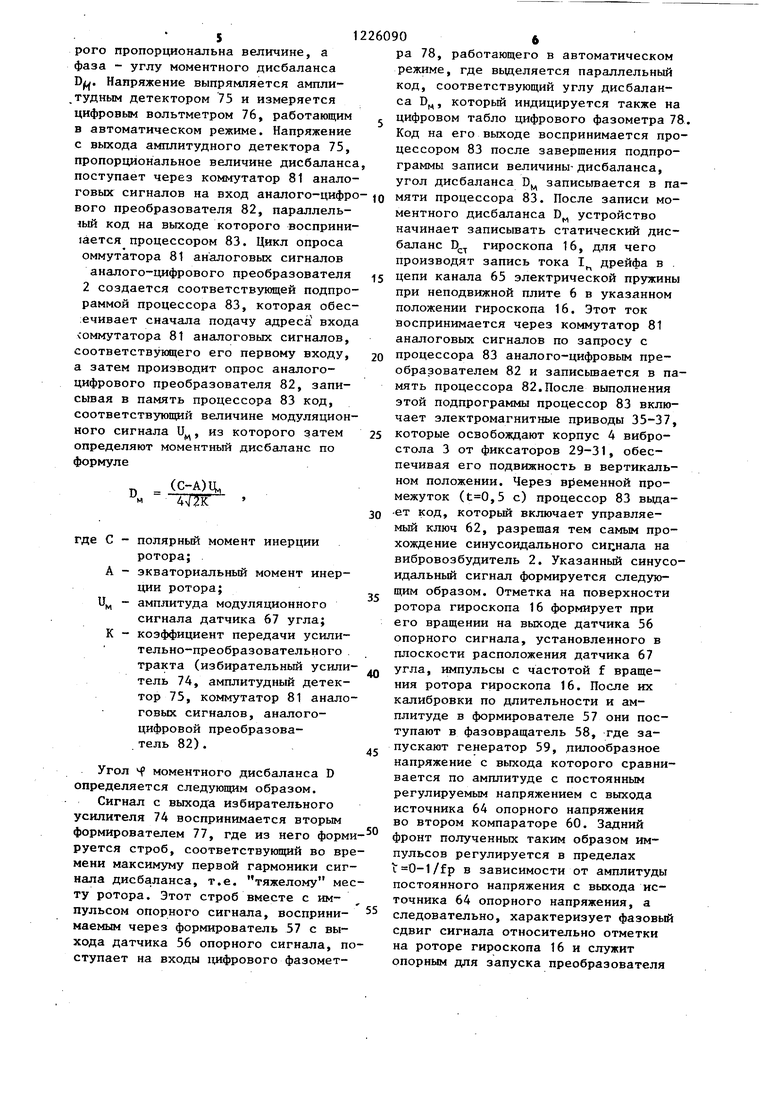
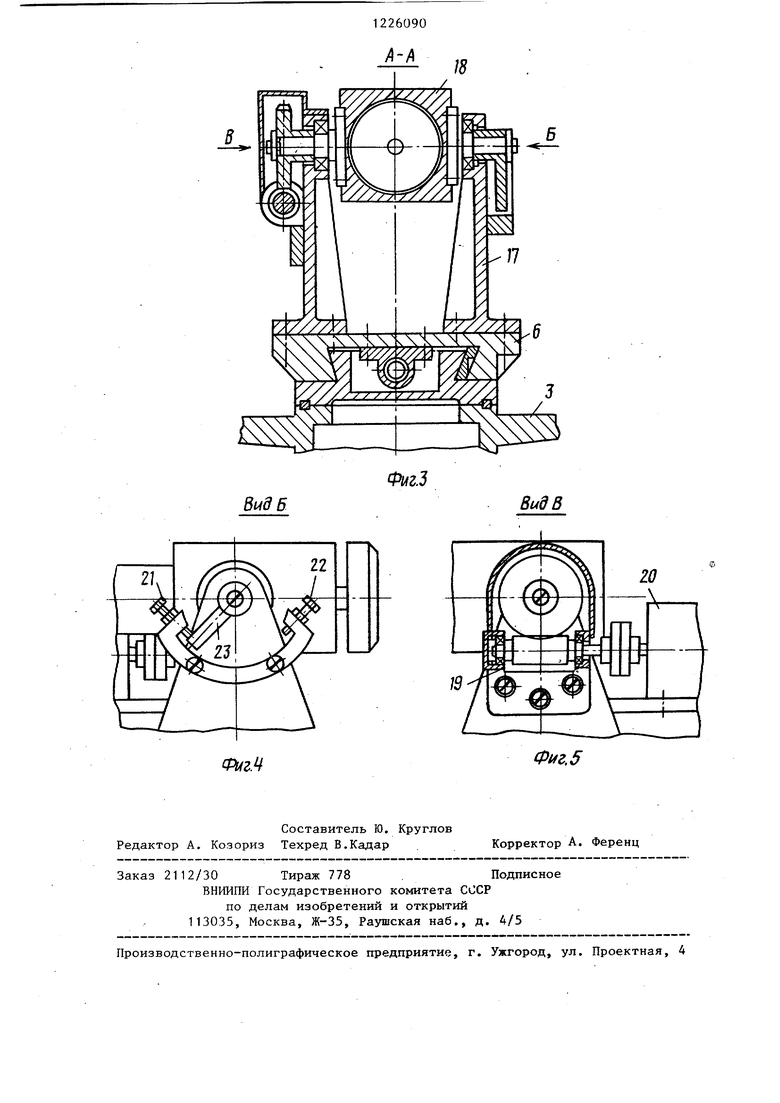
BOM крайнем положении взаимодействует сноей спиральной торцовой поверхностью с выполненной подобным же образом торцовой поверхностью вала гироскопа 16, подвижные фиксаторы 29-31, установленные на основании 1 равномерно по окружности, каждый из которых подпружинен соответственно пружинами 32-34, электромагнитные
зависимости от текущего значения энер- д приводы 35-37, взаимодействующую
с корпусом 4 вибростола 3 систему 38 защиты, выполненную в виде поИзобретение относится к балансировочной технике и может быть использовано для балансировки гироскопов, в частности динамически настраиваемых гироскопов.
Цель изобретения - повышение точности и производительности балансировки за счет использования контура управления процессом балансировки в
гии импульсов генерации.
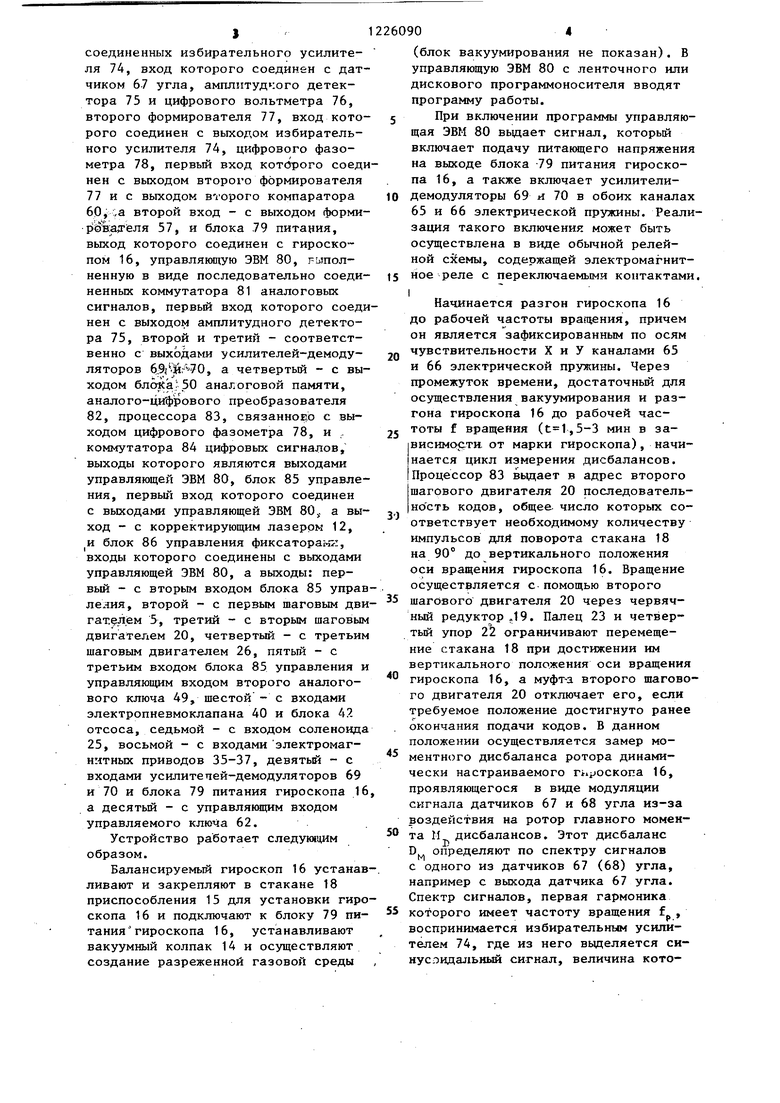
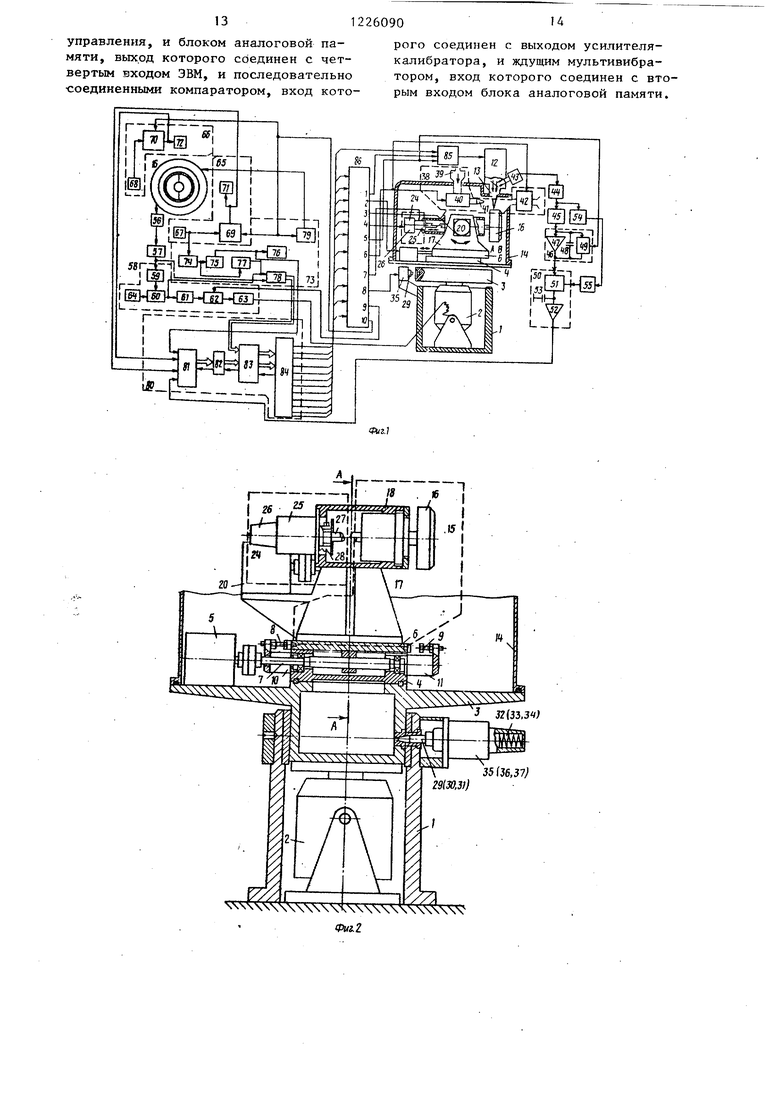
На фиг. 1 приведена структурная схема устройства; на фиг. 2 - конструктивная схема вибростола с приспособлением; на фиг. 3 - разрез А-А на фиг, 2; на фиг. 4 - вид Б на фиг, 3; на фиг. 5 - вид В на фиг. 3. Устройство для автоматической балансировки роторов гироскопов содержит основание 1, закрепленный на нем вибровозбудитель 2 с вибростолом 3, выполненным в виде корпуса 4, шагового двигателя 5, плиты 6, изготовленной с возможностью перемещения микрометрическим винтом 7 в горизонтальной плоскости, связанным с шаго- вьм двигателем 5, и двух регулируемых упоров 8 и 9, установленных на кронштейнах 10 и 11 по обе стороны от плиты 6 в направлении ее перемещения, корректирующий лазер 12с фо- кусируюш;им объективом 13, закрепленные на вибростоле 3 вакуумный колпак 14 и приспособление 15 для установки гироскопа 16, выполненное в виде кронштейна 17, стакана 18 для закрепления гироскопа 16, установленного на кронштейне 17 с возможностью поворота вокруг горизонтальной оси, перпендикулярной направлению движения титы 6, осуществляющего поворот стакана 18 червячного редуктора 19, связанного с ним второго шагового двигателя 20, третьего 21 и четвертого 22 регулируемых упоров,установленных на кронштейне 17 и фиксирующих вертикальное и горизонтальное положение стакана 18, пальца 2-3, закрепленного на оси вращения стакана 18 и взаимодействующего с регулируемыми упорами 21 и 22 в вертикальном и горизонтальном положениях стакана 18, привода 24, вьтолнен- ного в виде соленоида 25 и третьего шагового двигателя 26, вал 27 которого выполнен подпружиненным пружиной 28 с возможностью перемещения в осевом направлении так, что в пра«5
20
2S
30
следовательно соединенных пневмо- магистрали 39, электропневмоклапа- на 40, сопла 41 и блока 42 отсоса, последовательно соединенные датчик 43 измерения импульсов генерации, установленньй на пути луча лазера усилитель-калибратор 44, аналоговьй ключ 45, интегратор 46, выполненный в виде соединенньпс параллельно инвертирующего операционного усилителя 47, конденсатора 48 и второго аналогового ключа 49, и блок 50 аналоговой памяти, выполненный в виде последовательно соединенных третьего аналогового ключа 51 и второго операционного усилителя 52, выход которого является выходом блока 50 аналоговой памяти, и запоминающего конденсатора 53, включенного между входом второго операционного усилителя 52 и корпусом, последовательно соединенные компаратор 54, вход которого .соединен с выходом
35 усилителя-калибратора 44, и ждущий мультивибратор 55, выход которого соединен с управляющим входом третьего аналогового ключа 51, последовательно соединенные датчик 56 опорного сигнала, формирователь 57 и фазовращатель .58, выполненный в виде последовательно соединенных генератора 59 пилообразного напряжения, второго компаратора 60, преобразователя 61 импульсов в синусоидальный сигнал, управляемого ключа 62 и усилителя 63, выход которого соединен с входом вибровозбудителя 2, и источника 64 регулируемого опорного
50 напряжения, выход которого с вторым входом второго компаратора 60, два канала 65 и 66 электрической пружины, каждый из которых выполнен в виде последовательно соединенных
55 датчика 67 (68) угла, усилителя- демодулятора 69 (70) и датичка 71 (72) момента, блок 73 тест-контроля, вьшолненный в виде последовательно
40
45
следовательно соединенных пневмо- магистрали 39, электропневмоклапа- на 40, сопла 41 и блока 42 отсоса, последовательно соединенные датчик 43 измерения импульсов генерации, установленньй на пути луча лазера усилитель-калибратор 44, аналоговьй ключ 45, интегратор 46, выполненный в виде соединенньпс параллельно инвертирующего операционного усилителя 47, конденсатора 48 и второго аналогового ключа 49, и блок 50 аналоговой памяти, выполненный в виде последовательно соединенных третьего аналогового ключа 51 и второго операционного усилителя 52, выход которого является выходом блока 50 аналоговой памяти, и запоминающего конденсатора 53, включенного между входом второго операционного усилителя 52 и корпусом, последовательно соединенные компаратор 54, вход которого .соединен с выходом
усилителя-калибратора 44, и ждущий мультивибратор 55, выход которого соединен с управляющим входом третьего аналогового ключа 51, последовательно соединенные датчик 56 опорного сигнала, формирователь 57 и фазовращатель .58, выполненный в виде последовательно соединенных генератора 59 пилообразного напряжения, второго компаратора 60, преобразователя 61 импульсов в синусоидальный сигнал, управляемого ключа 62 и усилителя 63, выход которого соединен с входом вибровозбудителя 2, и источника 64 регулируемого опорного
напряжения, выход которого с вторым входом второго компаратора 60, два канала 65 и 66 электрической пружины, каждый из которых выполнен в виде последовательно соединенных
датчика 67 (68) угла, усилителя- демодулятора 69 (70) и датичка 71 (72) момента, блок 73 тест-контроля, вьшолненный в виде последовательно
, ,
соединенных избирательного усилителя 74, вход которого соединен с датчиком 67 угла, амплитудчого детектора 75 и цифрового вольтметра 76, второго формирователя 77, вход которого соединен с выходом избирательного усилителя 74, цифрового фазометра 78, первый вход которого соединен с выходом второго формирователя 77 и с выходом второго компаратора 60, ;а второй вход - с выходом форми- ронад еля 57, и блока .79 питания, выход которого соединен с гироскопом 16, управляющую ЭВМ 80, рыпол- ненную в виде последовательно соединенных коммутатора 81 аналоговых сигналов, первый вход которого соединен с выходом амплитудного детектора 75, второй и третий - соответственно с выходами усилителей-демодуляторов 6„9|., а четвертый - с выходом блока; 50 аналоговой памяти, аналого-цифрового преобразователя 82, процессора 83, связанно с выходом цифрового фазометра 78, и , коммутатора 84 цифровых сигналов, выходы которого являются выходами управляющей ЭВМ 80, блок 85 управления, первьц вход которого соединен с выходами управляющей ЭВМ 80 . а выход - с корректирующим лазером 12, и блок 86 управления фиксаторами:, входы которого соединены с выходами управляющей ЭВМ 80, а выходы: первый - с вторым входом блока 85 управления, второй - с первым шаговым двигателем 5, третий - с вторым шаговым двигателем 20, четвертый - с третьим шаговым двигателем 26, пятый - с третьим входом блока 85 управления и управляющим входом второго аналогового ключа 49, шестой - с входами электропневмоклапана 40 и блока 42 отсоса, седьмой - с входом соленоида 25, восьмой - с входами электромагнитных приводов 35-37, девятьй - с входами усилитепей-демодуляторов 69 и 70 и блока 79 питания гироскопа 16 а десятый - с управлякнцим входом управляемого ключа 62.
Устройство работает следующим образом.
Балансируемый гироскоп 16 устанавливают и закрепляют в стакане 18 приспособления 15 для установки гироскопа 16 и подключают к блоку 79 питания гироскопа 16, устанавливают вакуумный колпак 14 и осуществляют создание разреженной газовой среды
260904
(блок вакуумирования не показан). В управляющую ЭВМ 80 с ленточного или дискового программоносителя вводят программу работы.
При включении программы управляющая ЭВМ 80 выдает сигнал, которьй включает подачу питающего напряжения на выходе блока 79 питания гироскопа 16, а также включает усилители- демодуляторы 69 и 70 в обоих каналах 65 и 66 электрической пружины. Реализация такого включения может быть осуществлена в виде обычной релейной схемы, содержащей электромагнит- Ное реле с переключаемыми контактами.
10
15
I
Начинается разгон гироскопа 16 до рабочей частоты вращ,ения, причем он является зафиксированным по осям чувствительности X и У каналами 65 и 66 электрической пружины. Через промежуток времени, достаточный для осуществления вакуумирования и разгона гироскопа 16 до рабочей частоты f вращения (,5-3 мин в зависимости от марки гироскопа), начинается цикл измерения дисбалансов. Процессор 83 вьщает в адрес второго шагового двигателя 20 последователь- но сть кодов, общее, число которых соответствует необходимому количеству импульсов дли поворота стакана 18 на 90° до вертикального положения оси вращения гироскопа 16. Вращение осуществляется с помощью второго
шагового двигателя 20 через червячный редуктор ,19. Палец 23 и четвертый упор 22 ограничивают перемещение стакана 18 при достижении им вертикального положения оси вращения гироскопа 16, а муфт-а второго шагового двигателя 20 отключает его, если требуемое положение достигнуто ранее окончания подачи кодов. В данном положении осуществляется замер моментного дисбаланса ротора динамически настраиваемого riipocKona 16, проявляющегося в виде модуляции сигнала датчиков 67 и 68 угла из-за воздействия на ротор главного момен-
та М дисбалансов. Этот дисбаланс D определяют по спектру сигналов с одного из датчиков 67 (68) угла, например с выхода датчика 67 угла. Спектр сигналов, первая гармоника
которого имеет частоту вращения fp, воспринимается избирательным усилителем 74, где из него выделяется си- нуслидальньй си.гнал, величина которого пропорциональна величине, а фаза - углу моментного дисбаланса D. Напряжение выпрямляется ампли тудным детектором 75 и измеряется цифровьм вольтметром 76, работающим в автоматическом режиме. Напряжение с выхода амплитудного детектора 75, пропорциональное величине дисбаланса, поступает через коммутатор 81 аналоговых сигналов на вход аналого-цифро- )о мяти процессора 83. После записи мо- вого преобразователя 82, параллель- ibtii код на выходе которого восприни ается процессором 83. Цикл опроса
оммутатора 81 аналоговых сигналов аналого-цифрового преобразователя
2 создается соответствующей подпрораммой процессора 83, которая обес;ечивает сначала подачу адреса входа ч оммутатора 81 аналоговых сигналов, соответствующего его первому входу, а затем производит опрос аналого- цифрового преобразователя 82, записывая в память процессора 83 код, соответствующий величине модуляцион20
ментного дисбаланса D устройство начинает записьгоать статический дисбаланс D(,-j гироскопа 16, для чего производят запись тока 1 дрейфа в . 15 цепи канала 65 электрической пружины при неподвижной плите 6 в указанном положении гироскопа 16. Этот ток воспринимается через коммутатор 81 аналоговых сигналов по запросу с процессора 83 аналого-цифровым преобразователем 82 и записьшается в память процессора 82.После выполнения этой подпрограммы процессор 83 включает электромагнитные приводы 35-37, которые освобождают корпус 4 вибростола 3 от фиксаторов 29-31, обеспечивая его подвижность в вертикальном положении. Через В15еменной промежуток (,5 с) процессор 83 выда- -ет код, который включает управляемый ключ 62, разрешая тем самым прохождение синусоидального си1;напа на вибровозбудитель 2. Указанный синусоидальный сигнал формируется следующим образом. Отметка на поверхности ротора гироскопа 16 формирует при его вращении на выходе датчика 56 опорного сигнала, установленного в плоскости расположения датчика 67 угла, импульсы с частотой f вращения ротора гироскопа 16. После их калибровки по длительности и амплитуде в формирователе 57 они поступают в фазовращатель 58, где запускают генератор 59, пилообразное напряжение с выхода которого сравнивается по амплитуде с постоянным регулируемым напряжением с выхода источника 64 опорного напряжения во втором компараторе 60. Задний
кого сигнала U, из которого затем определяют моментный дисбаланс по формуле
П 4V/2K
где С - полярный момент инерции ротора;
А - экваториальный момент инерции ротора;
и„ - амплитуда модуляционного сигнала датчика 67 угла;
К - коэффициент передачи усилительно-преобразовательноготракта (избирательный усилитель 74, амплитудный детектор 75, коммутатор 81 аналоговых сигналов, аналого- цифровой преобразователь 82) .
Угол Ч моментного дисбаланса D определяется следующим образом.
Сигнал с выхода избирательного усилителя 74 воспринимается вторым
ментного дисбаланса D устройство начинает записьгоать статический дис баланс D(,-j гироскопа 16, для чего производят запись тока 1 дрейфа в 15 цепи канала 65 электрической пружин при неподвижной плите 6 в указанном положении гироскопа 16. Этот ток воспринимается через коммутатор 81 аналоговых сигналов по запросу с процессора 83 аналого-цифровым преобразователем 82 и записьшается в п мять процессора 82.После выполнения этой подпрограммы процессор 83 вклю чает электромагнитные приводы 35-37 которые освобождают корпус 4 вибростола 3 от фиксаторов 29-31, обеспечивая его подвижность в вертикаль ном положении. Через В15еменной промежуток (,5 с) процессор 83 выда -ет код, который включает управляемый ключ 62, разрешая тем самым про хождение синусоидального си1;напа на вибровозбудитель 2. Указанный синус идальный сигнал формируется следующим образом. Отметка на поверхности ротора гироскопа 16 формирует при его вращении на выходе датчика 56 опорного сигнала, установленного в плоскости расположения датчика 67 угла, импульсы с частотой f вращения ротора гироскопа 16. После их калибровки по длительности и амплитуде в формирователе 57 они поступают в фазовращатель 58, где запускают генератор 59, пилообразное напряжение с выхода которого сравни вается по амплитуде с постоянным регулируемым напряжением с выхода источника 64 опорного напряжения во втором компараторе 60. Задний
35
40
45
формирователем 77, где из него форми- ° фронт полученных таким образом имруется строб, соответствующий во времени максимуму первой гармоники сигнала дисбаланса, т.е. тяжелому месту ротора. Этот строб вместе с импульсом опорного сигнала, восприни- маемым через формирователь 57 с выхода датчика 56 опорного сигнала, поступает на входы 1Ц1ФРОВОГО фазомет12260906
ра 78, работающего в автоматическом режиме, где вьщеляется параллельный код, соответствующий углу дисбаланса В„, который индицируется также на цифровом табло цифрового фазометра 78. Код на его выходе воспринимается процессором 83 после завершения подпрограммы записи величины-дисбаланса, угол дисбаланса D записывается в па-
мяти процессора 83. После записи мо-
ментного дисбаланса D устройство начинает записьгоать статический дисбаланс D(,-j гироскопа 16, для чего производят запись тока 1 дрейфа в . цепи канала 65 электрической пружины при неподвижной плите 6 в указанном положении гироскопа 16. Этот ток воспринимается через коммутатор 81 аналоговых сигналов по запросу с процессора 83 аналого-цифровым преобразователем 82 и записьшается в память процессора 82.После выполнения этой подпрограммы процессор 83 включает электромагнитные приводы 35-37, которые освобождают корпус 4 вибростола 3 от фиксаторов 29-31, обеспечивая его подвижность в вертикальном положении. Через В15еменной промежуток (,5 с) процессор 83 выда- -ет код, который включает управляемый ключ 62, разрешая тем самым прохождение синусоидального си1;напа на вибровозбудитель 2. Указанный синусоидальный сигнал формируется следующим образом. Отметка на поверхности ротора гироскопа 16 формирует при его вращении на выходе датчика 56 опорного сигнала, установленного в плоскости расположения датчика 67 угла, импульсы с частотой f вращения ротора гироскопа 16. После их калибровки по длительности и амплитуде в формирователе 57 они поступают в фазовращатель 58, где запускают генератор 59, пилообразное напряжение с выхода которого сравнивается по амплитуде с постоянным регулируемым напряжением с выхода источника 64 опорного напряжения во втором компараторе 60. Задний
фронт полученных таким образом импульсов регулируется в пределах t 0-1/fp в зависимости от амплитуды постоянного напряжения с выхода источника 64 опорного напряжения, а следовательно, характеризует фазовый сдвиг сигнала относительно отметки на роторе гироскопа 16 и служит опорным для запуска преобразователя
71226090
61 импульсов в синусоидальньй сигнал, начальная фаза которого совпадает с фазой заднего фронта. Этот сигнал после прохождения через управляемый ключ 62 и усиления в усилителе 63 возбуждает колебания вибронозбудите- ля 2. Изменяя фазу этих колебаний изменением (вручную) амплитуды постоянного напряжения, добиваются
8
тона для определения ос ланса D. гироскопа 16, щего собой несовпадение масс с центром подвеса 5 оси вращения. Для его о измеряют ток 1 дрейфа положении, оси вращения канале 65 электрической дят описанным способом
- ил-жч о.лпош L:H JCUOOM
максимального показания тока дрейфа, ю цессора 83 и по формуле
снимаемого с выхода усилителя-демодулятора 69. Это напряжение через промежуток времени ( с), достаточный для выбора фазового сдвига фазовращателя 58, записывается через 15 коммутатор 81 аналогичных сигналов и аналого-цифровой преобразователь 82 в память процессора 83, где величина статического дисбаланса определяется по формуле
. Ч,К„1,,
где К, - коэффициент про ности;
,VH,
определяют величину осев са D .
20
Угол осевого дисбалан рает роли, так как дисба правлен вдоль оси вращен гироскопа 16. Знак его о плоскость коррекции, где
D
,Кйм Н
(1х-Г,.,
Пйх
где К - коэффициент пропорциональности (K,g -|g-),
KgM - крутизна системы: датчик
67 момента - усилитель-модулятор 69; Н - кинетический момент ротора
гироскопа;
fTHix амплитуда ускорения вибрации вдоль оси вращения гироскопа 16.
Угол дисбаланса v относительно отметки на роторе гироскопа 16 регулируется цифровым фазометром 78, работающим в автоматическом режиме. Параллельный код с его выхода воспринимается после окончания подпрограммы записи величины статического дисбаланса D . После этого с выхода процессора 83 последовательно поступают коды, отключающие вибровозбуди- тель 2 и арретирукя(ие фиксаторами 29-31 вибростол 3 за счет-действия пружин 32-34. Процессор 83 выдает также по адресу шагового двигателя 20 последовательность кодов, общее число которых соответствует необходимому для поворота стакана 18 на 90° до Горизонтального положения оси вращения гироскопа 16. Система го15д,( J),cos f, 0„ /,,) (D, s.n „ 0„ - in У ); (1)).,/(),)1г-5;пч„) ;
8
тона для определения осевого дисбаланса D. гироскопа 16, представляющего собой несовпадение центра его масс с центром подвеса ротора вдоль оси вращения. Для его определения измеряют ток 1 дрейфа в указанном положении, оси вращения гироскопа в канале 65 электрической пружины, вводят описанным способом в память проf- - ил-жч о.лпош L:H JCUOOM
цессора 83 и по формуле
. Ч,К„1,,
где К, - коэффициент пропорциональности;
,VH,
определяют величину осевого дисбаланса D .
15
20
Угол осевого дисбаланса D не играет роли, так как дисбаланс 0„ направлен вдоль оси вращения ротора гироскопа 16. Знак его определяет плоскость коррекции, где он находит25 ся: + - плоскость А и - - плоскость В,
После определения указанных дисбалансов в .соответствии с внутренней подпрограммой процессор 83 отключает
0 блок 79 питания гироскопа 16 и каналы 65 и 66 электрической пружины.
Гироскоп 16 тормозится до полной остановки, затем процессор 83 осуще5 ствляет преобразование замеренных дисбалансов Б„ D и D. с целью уменьшения величины удаляемой массы и проведения их к четырем точкам по поверхности ротора гироскопа 16. В
0 результате определяются величины суммарных неуравновешенных масс mj;A{B; , mlA(e и углы (е, 4 i:A(B) .
Эти преобразования осуществляют решением следующей системы уравнений:
5
т -- -(D +1 1 2R
д. .1
50
.
Чг ВстЕ,
У arctg
sin „
°S Ч ,
M-j-.arc
где R - радиус коррекции;
f - расстояние между плоскостями А и В коррекции; ; 1в расстояние от плоскостей коррекции А и В до центра подвеса ротора гироскопа 16. После расчета величин неуравновешенных масс га и углов cykMap- ных дисбалансов осуществляю их коррекцию. Через время ( с), достаточное для остановки ротора гироскопа 16, код с выхода процессора включает соленоид 25, который ввдви- гает вал 27 и последний по своей спиральной поверхности соединяется с валом ротора гироскопа 16. После этого на шаговый двигатель 5 поступает последовательность кодов, количество которых позволяет переместить плиту 6 с гироскопом 16 в приспособлении 15 для установки гироскопа в положение, соответствукяцее совпадению плоскости А ротора гироскопа 16 с фокусом объектива 13 лазера 12. Упор 9 ограничивает перемещение плиты 6, а муфта первого шагового двигателя 5 отключает его, если требуемое положение буде7 достигнуто ранее окончания его поворота.
Аналогичным образом срабатывает третий- шаговый двигатель 26, на вход которого подается последовательность кодов, количество которых соответствует повороту на угол . Код с выхода процессора 83, пропорциональный величине удаляемой массы Ч А поступает на первый вход блока 85 управления и обеспечивает накачку лазера до определенной энергии W..
ft
(T)Tn А ,
где К(Т) - коэффициент, характеризующий зависимость величины удаляемой массы т. от энергии лазерного импуль- 55 са.
Процессор 83 вьщает следующий код, ,но уже на второй вход блока 85 управ
t
,.Н „
10
15
20
25
bl eos4 ,,D.co34 I
ления, включая накачку лазера 12, в результате чего в его конденсаторных батареях (не показаны) запасается энергия накачки, пропорциональная величине дисбаланса.
После этой подготовки соответствующим кодом включают электропневмо- клапан 40 и блок 42 отсоса. Возникает направленный поток газа, отсасываемый блоком 42 отсоса и защищаниций поверхность ротора гироскопа 16 и фокусирукшщй объектив 13 от продуктов эрозии, возникающих при лазерном воздействии. Через промежуток времени (,1 с), достаточный дпя срабатывания электропневмоклапана 40 и блока 42 отсоса, кодом с процессора 83 на третий вход блока 85 управления осуществляется запуск лазера 12, в результате чего с поверхности ротора удаляется неуравновешенная масса т Л . Лазерный импульс регистрируется датчиком 43 измерения импульсов генерации лазера 12, представляющим собой, например, фотодиод с большой активной поверхностью, закрепленный в корпусе с окном, затененным светофильтрами, и установленный на пути луча лазера 12, в виде электрического импульса V(t)Kp(t), где р(t) - текущее значение мощности импульса, К - коэффициент пропорциональности (обьмно К-10- -10- мВ/Вт), т.е. является величиной, пропорциональной мощности генерации лазерного импульса.
Указанный импульс после усиления усилителем-калибратором 44 интегрируется в интеграторе 46 в постоянное напряжение
(t) ,
35
40
5
0
t
W.
-время интегрирования (t,«2.10-3),
-энергия импульса генерации, величина которого пропорциональна истинному значению энергии W; импульса генерации .
11
Компаратор 54, настроенный на нулевой начальньй уровень входного сигнала, срабатывает от импульса генерации и формирует прямоугольный импульс длительность которого равна длительности сигнала с выхода датчика 43 измерения импульсов генерации. Через время, соответствующее времени указанного импульса и достаточное для осуществления интегрирования сигнала от импульса генерации, ждущий мультивибратор 55 формирует от заднего фронта импульса с компаратора 54 импульс записи и отпирает третий аналоговый ключ 51, в результате в конденсаторе 53 происходит запоминание напряжения, величина которого пропорциональна текущему значению энергии лазерного импульса. Время хранения информации на входе усилителя 52 для существующих схем составляет около 30 мин, что достаточно для его эффективной работы в предлагаемом устройстве. Величина энергии W через время t 1100 МКС с момента подачи
процессором 83 импульса запуска лазера записывается им в память, где сравнивается с заданньм значением W Вырабатывается сигнал ошибки AW (), который затем отрабатьшает ся процессором 83 и формирует новый цикл коррекции массы из той же зоны ротора гироскопа 16, для чего последовательно подает коды на второй и третий входы блока 85 управления, осуществляя накачку лазера 2 до нового значения энергии &V, а затем и генерацию корректирукицего импульса Если размеры зоны малы и повторную коррекцию дисбаланса из нее произвести не удается, то величина энергии aw разбивается пополам и коррекцию осуществляют последовательно под малым углом ЛМ «1 -3° слева и справа от начальной зоны. В данном случае перед указанным циклом сигналом на третий шаговый двигатель осуществляют указанный поворот, а затем уже корректируют дисбаланс. Указанный процесс может быть повторен несколько раз до тех пор, пока суммарная корректирующая энергия будет равна
W. Е
1 1
А
где
1 - индекс;
п - число корректирующих импульсов в зоне коррекции.
, 2609012
После этого последовательность кодов с выхода процессора 83 прекращает подачу газа в зону обработки, а также поворачивает третьим шаговым двигателем 26 ротор гироскопа 16 на угол 180 , а затем подпрограмма коррекции дисбаланса повторяется, но уже для величины неуравновешенной массы m lA . Устранив дисбаланс в плоскости коррекции А, приступают к коррекции дисбаланса в плоскости В. С этой целью процессор 83 подает по адресу шагового двигателя 5 последо- вател ьность кодов, которая вызывает перемещение плиты 6 с приспособлением 15 для установки гироскопа на расстояние I ,до плоскости коррекции В, После этого выше описанным образом осуществляется коррекция дисбалансов ит1-6 во второй плоскости
10
15
20
25
30
35
. - .
40
45
55
га Б и т.6 коррекции.
После окончания процесса балансировки с выхода процессора 83 последовательно поступают коды, которые отключают накачку лазера 12 и размыкают кинематическую связь между ротором гироскопа 16 и валом 31 третьего шагового двигателя 26. Вакуумный колпак 14 снимается, гироскоп 16 отключается от блока 79 питания и удаляется. На этом процесс балансировки заканчивается.
Применение в предлагаемом устройстве датчика измерения импульса генерации, усилителя-калибратора и блока аналоговой памяти, а также использование контура управления балансировкой в зависимости от текущего значения энергии импульсов генерации обеспечивает повышение точности и производительности процесса применительно к балансировке роторов динамически настраиваемых гироскопов.
Формула изобретения
Устройство для автоматической балансировки роторов гироскопов по авт. св. № 1055980, отличаю- щ е е с я тем, что, с целью повышения точности и производительности балансировки, оно снабжено последовательно соединенными датчиком измерения импульсов генерации, уста- новленным на пути луча лазера, усилителем-калибратором, аналоговым ключом, интегратором, установочный вход которого соединен с третьим входом блока
управления, и блоком аналоговой памяти, выход которого соединен с четвертым входом ЭВМ, и последовательно соединенными компаратором, вход которого соединен с выходом усилителя- калибратора, и ждущим мультивибратором, вход которого соединен с вторым входом блока аналоговой памяти.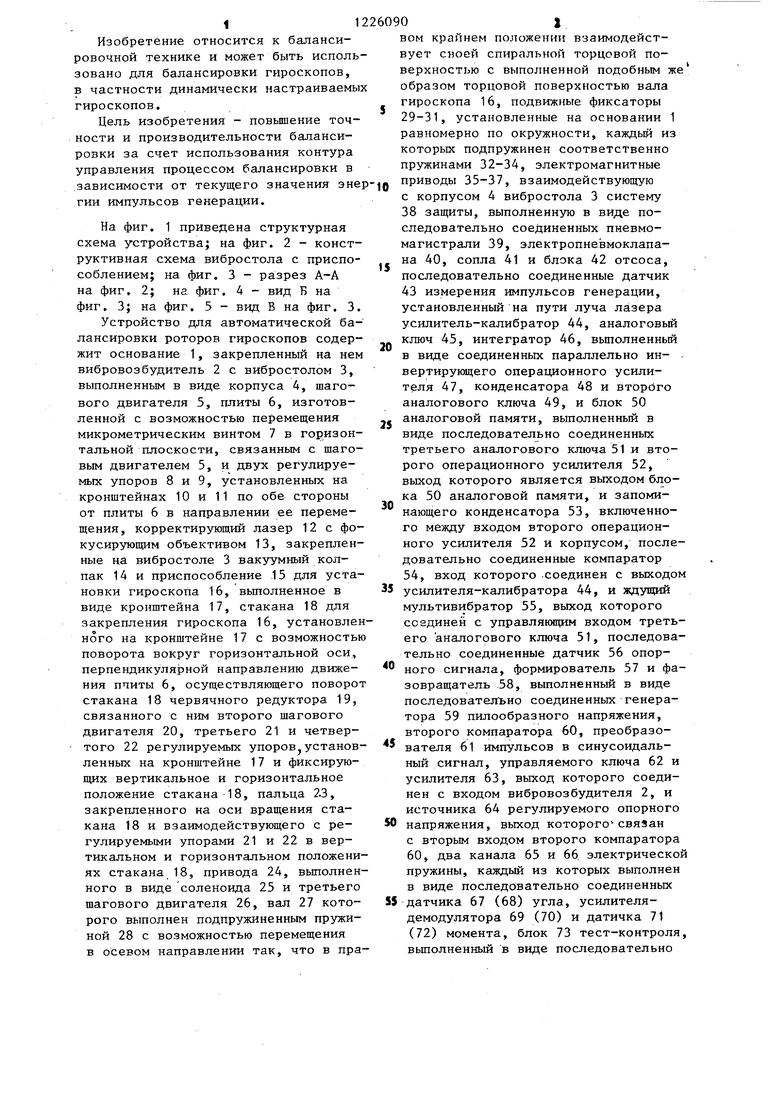


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| Устройство для автоматической балансировки роторов гироскопов | 1988 |
|
SU1649275A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| Устройство для динамической балансировки роторов лучом лазера | 1987 |
|
SU1434301A1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| Способ балансировки лучом лазера | 1990 |
|
SU1772637A1 |
| Устройство для динамической балансировки лучом лазера роторов | 1983 |
|
SU1130753A2 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Устройство для динамической балансировки роторов | 1985 |
|
SU1293508A1 |
Изобретение относится к балансировочной технике и может быть использовано для балансировки динамически настраиваемых гироскопов. Целью изобретения является повышение точности и производительности балансировки за счет использования контура управления балансировкой в зависимости от текущего значения энергии импульсов генерации. Сигнал с датчика измерения импульсов генерации преобразуется в интеграторе и запоминается в блоке аналоговой памяти, откуда он поступает на вход управлякидей ЭВМ, выход которой через блок управления связан с корректирующим лазером. 5 ил. g ts9 to О)
Г
xvv
3 32{33,3)
В ид В
Фкг.
Составитель Ю. Круглов Редактор А. Козориз Техред В.Кадар
Заказ 2112/30 Тираж 778 . Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг, 5
Корректор А. Ференц
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Суминов В.М., Скворчевский А.К | |||
| Уравновешивание вращакщихся тел лучом лазера | |||
| - М.: Машиностроение, 1974, с | |||
| Способ закалки пил | 1915 |
|
SU140A1 |
| Борисенко В.Д | |||
| и др | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| - Электронная промьшшенность, 1979, № 11-12, с | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
