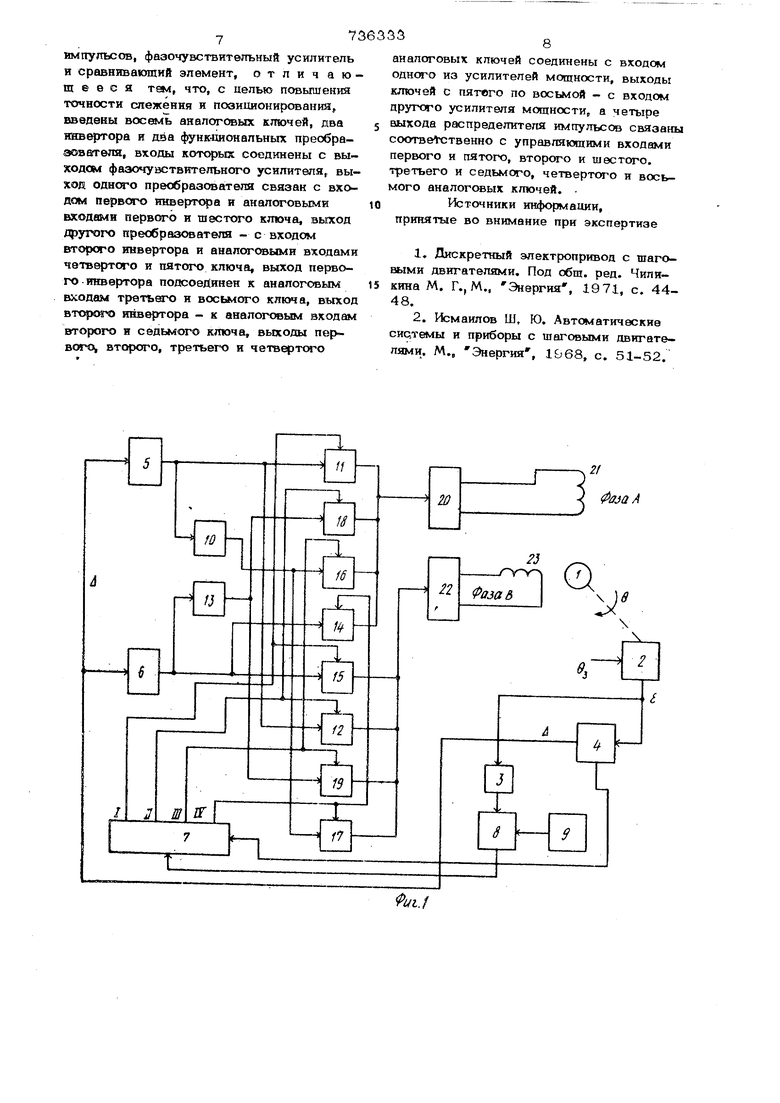
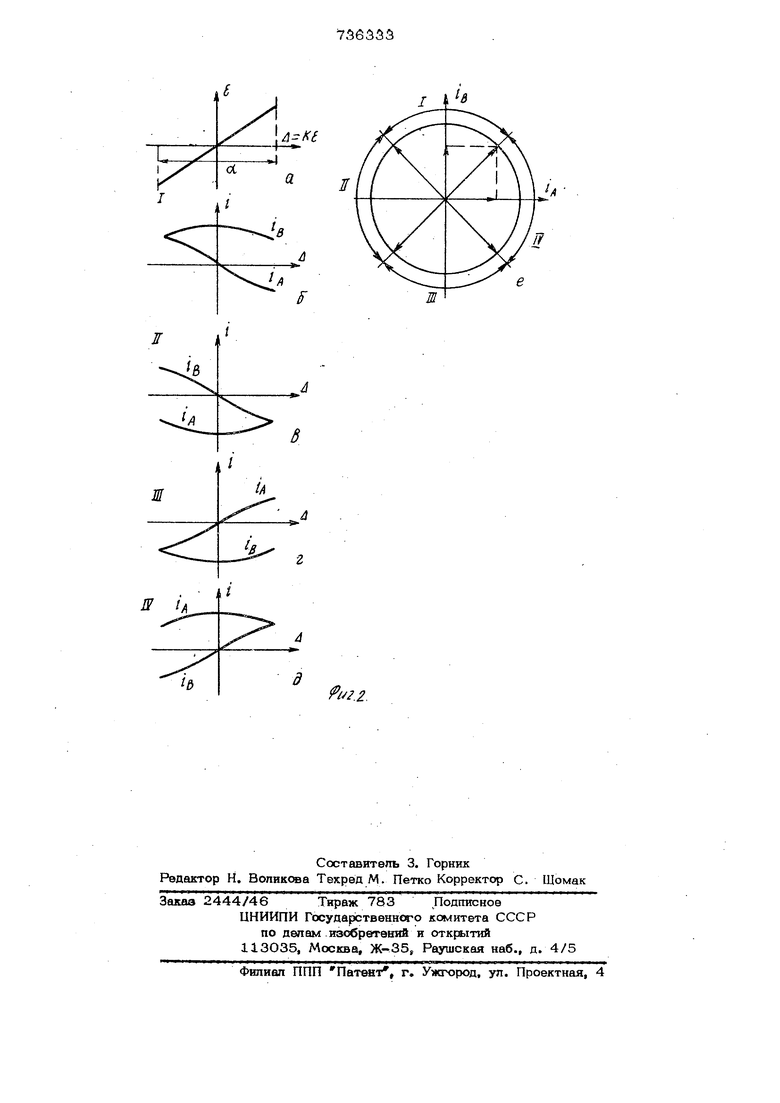
(54) УСТРОЙСТВО ДДЯ УПРАВЛЕНИЯ ШАГСВЫМ Изобретение относится к автоматизировагным электроприводам и может быть использовано в научных приборах, оптико-механических устройствах седамещення изображений, станках и установке. VfaBecTHbi устройства для управления шаговыми электродвигателями, в для повышения помехозащищенности рааом кнутсвч шагового привода используются датчики обратнс связи по положению, что исключает накопление ошибки, характерной для разомкнутых систем с двигателями l. В таких устройствах, работающих по сигналам отклонения от заданного положения, используются ойычно стандартные датчики с непрерывным выходным сигналом. Задающий сигнал также является непрерывным, а сигнал рассогласования npe образуется в переменную (для пропорпио-, нальных систем) или фиксированную {для релейных систем) частоту импульсов, которая с учетом знака рассогласования ЭЛЕКТРОДВИГАТЕЛЕМ отрабатывается раз(кнутым шаговым приводом. Однако введение обратной связи по положению не приводит к улу;лнению характеристик , в частности точностных, которые зависят только от примененного разомкнутого шагсжого привода. Наиболее близким по технической сущности и достигаемому результату к данному устройству Является система с шаговым электродвигателем 2, вал которого связан с сравнивающим элементом, сигнал рассогласования с которого после ycroieния фазочувствительным усилителем шбступает на пороговое устройство. Если сигнал рассогласования превышает заданную величину порогового сигнала, то ключевое устройство открьтается и разрешает поступление импульсов от импул1л-.ного генератора на схему управлен1 Я ujaroBbiM электродвигателем, состолитую их распределителя импульсов и усилитолей мошности. Команда о направлении г.ратения подастся яа схему управления с фнаочуьствито/гьноГО усилителя в зависимости от знака сигпапа рассогласования. Однако Б указанной системе точксжть спежения и позиционирования определяется ценой шага разомкнутого шагового электро привода, а введение датчика обратной связи не позволяет ее улучшить. Цель изобретения - повьшение точности слежения и позиционирования устройства Это достигается тем, что в устройство управления шаговым электродвигателем, содержащее усилители мощности, тягающие фазы двигателя, распределитель импульсов, пороговое устройство, хлгонеаое устройство, генератор тлпульсов, .ф;1.зочуБствительный усилитель и cpaEiHHг.оюший элемент, введены восемь аналого вык ключей, два инвертора и два функцио нальных преобразователя, соединеннь :е ойоими входами с выходом фазочувствитепьного усилителя. Выход одного функционального преобразователя связан с входом первого к.нвергора и аналоговыми входами первог-о я нге :того длюча, а выход другого преоб :разовптеля - с входом второго инвертора Т аналоговыми 1зхода п четвертого и пя п)го ключей Выход первого инвертора подсоединен к аналогОБЫ -л входам тре-тьо го и восьмого ключ.ей, выход второго шшертора - к анелсчхэвым входам нторог Г седьмогО ключей. Выходы первого, второго, третьего и четвертох о анапогс йых соэдинвкы с входом одного иа усилителей мощности, о. выходы клтачий с miTOro по восьмой - с входом др;;лгого }х;илителя мощности Четыре выхода раснрепелителя тлпупчг сев связаны соответственно с упраЕ.ля:юшими входами первого и пятого, второго и шестого, третьего н седьмого, штвертог о и восьмого аналоговых ключей Такое выполнение устройства позволяет за счет изменения токов в фазах двигатеж; в функции рассогласования плавно изменять пространственное положение характеристики электромагнитного момента шаговогю двтпгателя, вследствие чего tic пучоют высокую точность слежения si по- аиционирования, определяемую датчиком положения, а не.ценой шага двигателя. На фиг. 1 приведена функшюнальная схема устройства применительно к четырехтактному шггговокгу двигателю: на фиг. 2 - а, б,-в, г, д - пргалерный аид характеристик вход-выход фазочувствител него усилителя и функциональных прео(5ра .зователей} HQ фиг, 2е - векторная диаграмма токов в фазах. Устройство содержит двухфазный шаговый электродвигатель 1, вал которого связан с сравнивающим элементом 2, выход которого подключен к входам порогового устройства 3 и фазочувствительного усилителя 4, подсоединенного своим выходом к вxoдaIvI функциональных преобразователей 5 и 6. Второй выход фазо - чувствительного усилрггеля. 4, по которому передается сигнал о знаке рассогласова тая, соединен с входом выбора направления вращения распределителя шлггульсов 7, управляющий вход которого связан с выхсУ дом ключевого устройства 8, соединенного однг-ЕМ входом с выходом генератора талнульсов 9, а другим - с выходом порогового устройства 3, Выход функционального преобразователя 5 связан с вхо. дом инвертора 10 и аналоговыми входами кгаочей 11 и 12, выход преобразователя 6 - с входом HFffiepTOpa 13 и -аналоговыми входами кгпочей 14 и 15,.выход инвертора 10 - с аналоговыми входами ключей 16 и 17, а выход инвертора Ц с ацаноговьпли входами ключей 18 и 19, Выходы аналоговых ключе 11, 14, 16, 18 соединены-с входом учзилитеп.; мощности 2 О, к выходу которого подсоединена фаза 21 шагового двигателя, а выходы аналоговых ключей 12, 15, 17 19 - с входом усилителя 22. к выходу которого подсоединена фаза 23 даигателя. Выходы распределителя 1$мпул:ьсов 7 связаны соответствекяо с у я равняющим и входак1и аналоговых ключей 11 и 15 12 и 18, 16 н 19, 14 и 17. Устройство работает следующим образом Бая шагового электродвигателя находится 3 таком положении 8 ,, что срлкап рассогласованкя 6 на выходе сравнгтающего элемента 2 равен 1сулю. Сигналы на выходах усилшвля 4 и порогового уст-ройства о Отсутствуют и распределитель импульсов 7 находится в таком состоя-., нии, что потенциал на одном из его выходов открывает аналоговые ключи 11 В этом случае сигналы с выходов функциональных преобразователей 5 и 6 поступают на входы усилителей мощности 20 и 22 соответственно. Примерный вид характеристик вход-выход фуикциональ- ных. преобразователей и фазочувствительного усилителя 4 приведен на фиг. 2. Усилитель 4- обеспечивает линейную характеристику в пределах заданной аоны„ ширина по выходному сиг-нал Л совпадает с шагом сЛ лвигатепя, а за ее пределами имеет место ограничение (коэффициент усилен Н К равен нулю/. Эта характеристика изображена на фиг. 2 При открытых аналоговых ключах 11 и 15 сигнал Д, поступающий с выхода усилителя 4 на функциональные преобразователи 5 и 6 и преобразуемый в соответствии с функциональными зависимостями, приведенными на фиг. 26, попадает на входы усилителей мощности 20 и 22, обеспечивая протекание в фазах двигате- пя требуемых токов i и 1„ . Так как в исходном состоянии сигнал рассогласо;вания 0, то в соответствии с ф;гг. 26 ток д ---О, а ток . маскимален. РеаулЬ тирующий вектор токов совпадает с вектором тока i и располагается в центре первого квадранта, отмеченного рртмской цифрой 1 на фиг. 2е. Из векторной диаллраммы на фиг. 2е видно, что в случае, когда двигатель имеет синусоидальное распределение в воздушном зазоре поля статора и ротора, плавное перемещение результирующего вектора магнитного поля статора и, следовательно, перемептение ротора шагового двигателя, пропорииональ нее С1ггналу рассогласования , можно обеспечить, если токи в фазах изменяютс ПО стгаусоидальнок1у и косинусоидальному законам. Такое изменение токов обеспечивается в пределах квадранта 1 за счет характеристик преобразователей 5 и 6 (фиг. 26). Бели распределение магнитг ых полей отличается от синусоидального, то шаговы двигатель можно прокалибровать и в соот-аетствии с полученными результатами определить вид характеристик вход-выход функциональных преобразователей 5 и 6. При возникновении сигнала рассогласования Б , меньшего по мо,аулю, чем половинаширинызоны нечувствительного порого вого устройства 3, равной Л, засчет изменения, например, сигнала задающего воздействия Q, результирующий вектор токов поворачивается, на соответствующий электрический угол иэ-за величины изменения токо ,д, и 1, , что приводит к повороту вала двигателя и уменыпению сигнала рассогласования ,,. После окончания переходного процесса вал двигателя занимает новое положение, определяемое сигналом задаю щего воздействия 6, точностью до статической ошибки систалы. Очевидно, что введение в систему астатизма, эта ошибка уменьшается. Бели сигнал рассогласования превышает величину (Х/2 , то сигнал с выхода nopoi-ового устройства 3 открывает ключевое устройство 8 лля подачи импульсов от генератора 9 на вход распределителя импульсов 7. Команда выбора направления подается на распределитель импульсов в зависимости от знака сигнала рассогласования. Таким образом, большие рассогпасова-. ния отрабатываются двигателем в шаговом режиме, а малые - за счет иамекениа величин фазных токов в функшш сигнала рассО1 ласова}гия. Из графиков на фиг. 2а, б, в, г, д видно, что при больших рассогласованиях токи в обмотках двигателя по модулю равны 0.70 Tim и при ксмыу тации аналоговых ключей ifro cm налам распределителя импульсов изменяются только по знаку, обеспечивая парную четыректакт ную коммутацию шагового двигателя. По графикам фиг. 2 можно проследить по каким законам изменяются токи в фазах двигатеття в заБИС}а ости от того, в каксм квЕздранте располагается в данный тломент результатирующий вектор фазных токов }д и . Так, для Ш квадранта по сигналу от распределителя ик пульсов открыты аналоговые ключи 16 и 19, н на вход усилителя мощности 2О фазы А поступает через инвертор 10 сигнал от функцконалыюго преобразователя , а на вход усилителя мощности 22 фазы )3-сигнал от преобразователя 6 через т вертор 13. Токи в фазах в функшги сиггнала на выходе усилителя 4 изменяюрся в соответствии с завис1а остями на фт1г. 2г, Испоптлзуемый шаговый двигатель может itMeTb другое число тактов коммутащти и фаз, а также расщепленные фазы, В чЭтом случае соответственно изменяют число функциональных преобразователей, ггкалоговых кгпочей и усилителей мопгнос- ти, Предлагаемое устройство при помощи введения функииоиальг ых преобразователей, инверторов и аналоговых ключей обеспечивает изменение фазных токов шагового электродвд гателя в функции сигнала рассогласования и повышает точность слёения и позиционирования автоматической системы с шаговым двигателем. Формула изобретения Устройство для управления шаговым лектродвигателем, содержащее усилитеи мснлности, питающие фазы двигателя, аспределитель импульсов, пороговое устройство, ключевое устройство, генератор
импульсов, фазочувствитепьный усилитель и с ревнив акиций элемент, отлич ающ е а с я тем, что, с целью повышения точности сяежёння и позиционирования, введены восем. аналогсдаых ключей, два инвертора и два фунКЦиональных преобразователя, входы которых соединены с выходом фаэочувствительного усилителя, выход одного преобразователя связан с входом первого инвертера н аналоговмми входами первого и шестого ключа, другого преобразователя - с входом второго инвертора и аналоговыми входами четвертого и пятого ключа, выход первого инвертора подсоединен к аналоговым входам третьего и восьмого ключа, в:ыход второго инвертора - к аналогсдаым входам второго н седьмого ключа, выходы первого второго, третьего и четвертся-о
аналоговых ключей соединены с входом одного из усилителей мощности, выходы ключей с пятеро по восьмой - с входом другого усилителя мощности, а четьгре
5 выхода распределителя импульсов связаны соотве1х;твенно с управляюгаими входами первого и пятого, второт о и шестого, третьего и седьмого, четвертого и восьмого аналоговых ключей. 10№:точники информации,
принятые во внимание при экспертизе
1,Дискретный электропривод с шаговыми двигателями. Под сбш, ред. Чипи15 кина М. Г., М., Энергия, 1971, с. 4448.
2.Исмаилов Ш, Ю. Автоматические системы и приборы с шаговыми двигателями. М., Энергия, 1968, с. 51-52.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым электродвигателем | 1981 |
|
SU1032584A2 |
| Устройство для управления шаговым приводом | 1985 |
|
SU1315941A1 |
| Способ калибровки шагового электродвигателя | 1977 |
|
SU653713A1 |
| Устройство для управления шаговым двигателем | 1982 |
|
SU1042151A1 |
| Вентильный электродвигатель | 1975 |
|
SU743128A2 |
| Устройство для управления шаговым двигателем | 1983 |
|
SU1098099A1 |
| Устройство для управления шаговым двигателем | 1981 |
|
SU1066019A1 |
| Замкнутый шаговый электропривод | 1984 |
|
SU1259465A1 |
| Устройство для управления шаговым двигателем | 1980 |
|
SU902191A1 |
| Однофазный преобразователь постоянного тока в переменный | 1978 |
|
SU748770A1 |
ajaA
fef,
I
I
