Изобретение относится к электротехнике.
Из основного авт. св. № 556542 известен вентильный электродвигатель с датчиком положения ротора, имеющим циклическую характеристику вход-выход, линейную в пределах цикла, причем в цикл укладывается целое число пространственных периодов магнитного поля статора двигателя, соединенным с усилителями мощности через функциональный преобразователь, содержащий преобразователи линейно изменяющегося, сигнала в ступенчатый и в сигналы, близкие к синусоидальным, и трехвходовой суммато з- с управляющим первым входом, вторым входом, соединенным с выходом датчика положения ротора и входом преобразователя линейно изменя)ощегося сигнала в ступенчатый, подключенного своим выходом к третьему входу сумматора, связанного выходом с входами преобразователей линейно изменяющегося сигнала в сигналы, близкие к синусоидальным/ соединенных своими выходами с входами усилителей мощности 1.
Целью настоящего изобретения является повышение КПД.
Указанная цель достигается тем, что устройство содержит фильтр, блок умножения и дополнительные функциональный аналоговый и цифроаналоговый преобразователи, вход последнего из которых связан с управляющим входом сумматора, а выход через последовательно соединенные фильтр и полнителБНЫй функциональный преобразователь подключен к одному из входов блока умножения, соединенного вторьлм своим входом с выходом сумматора, а выходом - с входами основных функциональных преобразователей.
15
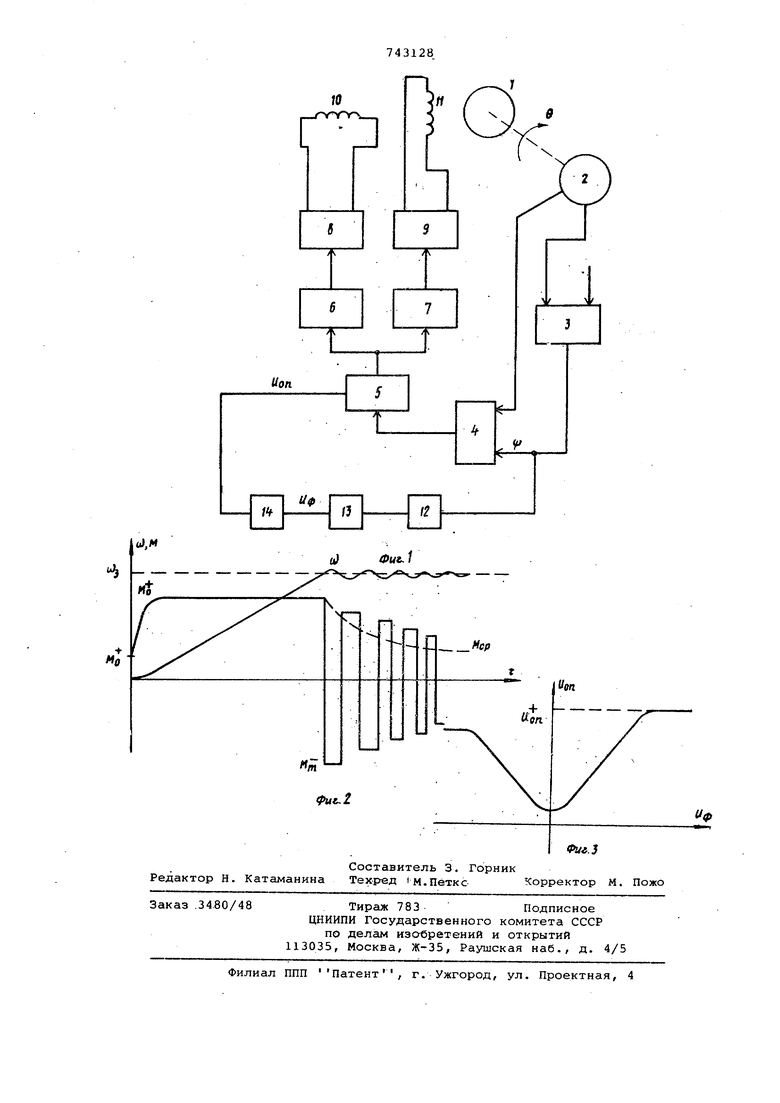
На фиг. 1 приведена функциональная схема вентильного электродвигателя.с двухфазным шаговым электродвигателем; на фиг. 2 - временные диаграм20мы изменения скорости lu и момента М двига- еля при пуске и стабилизации скорости; на фиг. 3 - статическая характеристика дополнительного аналогового функционального преобразова25теля.
Вентильный электродвигатель (см. фиг. 1) содержит шаговый дйигатель 1, на валу которого установлен цифровой датчик 2 положения, подключенный к управляющего устройства 3 и цифрового сумматора 4. Выход сумматора 4 связан через цифроансшоговый: преобразователь 5, выполняющий функции блока умножения с двумя аналоговыми функциональными преобразователями 6 и 7, к выходам которых через усилители 8 и 9 мощнос ти подсоединены фазы 10 и 11 двигателя. Выход управляющего устройства 3 подключен к управляющему входу сум матора 4 и к дополнительному цифроаналоговому преобразователю 12, выхо которого через последовательно соеди ненные фильтры 13 и дополнительный аналоговый функциональный преобразователь 14 соединен с входом опорного (эталонного) напряжения основного цифроан.алогового преобразователя 5. Устройство работает следующим образом. Для упрощения рассуждений предположим, что в приводе должен осуществляться- пуск за минимально возможное время и вращение с заданно скоростью С). Пусть перед пуском управляющий сигнал Ч на управляющем входе сумматора 4 равен нулю, вал двигателя неподвижен, а рпорц.ое напряжение Uon цифроаналогового преобразователя 5 минимально и определяется статической характеристикой преобразователя 14 (см. фиг. 3) при напряжении на выходе фильтра 13, рав ном нулю, т.е. Цф - 0. Принимая, что усилители мощности 8 и 9 по своим характеристикам близки к идеальным источникам тока (что обычно имеет место на практике для такого вида приводов), момент двигателя можно за писать в виде ,vv siM4--Kl siHS- K Up s-in, где и on - f (иф) ; К и К - постоянные коэффициенты При Ч О момент двигателя равен нулю, а ток в фазах пропорционален опорному напряжению Uon. . При пуске сигнал Ч устанавливается равным Ч - 1t/2 и в первый момент времени момент двигателя М ап Под действием этого момента начинается нарастание скорости двигателя ОУ - -гг (см.фиг. 2) . При этом напряжение, возникшее на выходе цифроаналогово го преобразователя 12 и пропор циональное Ч , пройдет через фильтр и будит нарастать с постоянной времени этого фильтра до установившегос значения. По этому же закону будет возрастать момент двигателя до величины Му (фиг. 2) . Раз.гон двигателя будет происходить с максимальным ускорением, обусловленным электромагнитным моментом М,так как постоянная времени фильтра 13 всегда может быть, выбрана существенно меньше электромеханической постоянной времени привода. Когда си-Юз, управляющее устройство 3 выработает сигнал ТГ/2. Предположим, что Ч -ft/2 (такое значение сигнала Ч позволяет сделать систему инвариантной к изменению нагрузки) .Поскольку Цф на выходе фильтра 13 не может измениться скачком, то момент двигателя примет максимальное отрицательное значение Му и под действием его начнется торможение. Как только скорость станет ниже заданной (Co«A;j) , управляющее устройство 3 выработает сигнал It/2 и т.д. При этом в приводе п.од действием переменного момента двигателя возникает скользящий режим стабилизации скорости, сопровождаемый ее колебаниями с высокой частотой и малой амплитудой. Для сохранения баланса энергий в системе необходимо, чтобы момент двигателя компенсировал в установившемся режиме момент-нагрузки. Это обеспечивается автоматическим уменьшением средней составляющей момента двигателя (показано пунктирной линией на фиг. 2). Пропорционально ей уменьшится напряжение Цф на выходе фильтра и опорное, напряжение Uoг Соответственно уменьшатся амплитуды токов в фазах двигателя и максимальные значения электромагнитного момента двигателя, что приведет к снижению потерь в фазах двигателя, т.е. повысит его КПД. Формула изобретения Вентильный электродвигатель по авт. св.№ 556542, о т л и ч а ю щ и и с я тем, что, с целью повышения КПД, снабжен фильтром, блоком умножения и дополнительными функциональными аналоговьом выделяющим модуль функции и цифроаналоговым преобразователями, вход последнего из которых связан управляющим входом сумматора, а выход через последовательно соединенные фильтр и дополнительный функциональный преобразова- . тель подключен k одному из входов блока умножения, соединенного вторым своим входом с выходом сумматора, а выходом - с входами основных функциональных преобразователей. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 556542, кл. Н 02 К 29/02, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1985 |
|
SU1324088A1 |
| Моментный вентильный электропривод | 1986 |
|
SU1427540A1 |
| Вентильный электропривод постоянного тока | 1989 |
|
SU1676055A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Устройство для калибровки вентильного электродвигателя | 1987 |
|
SU1417155A1 |
| Функциональный преобразователь | 1979 |
|
SU855675A1 |
| Однофазный инвертор | 1978 |
|
SU771829A1 |
| Устройство для управления @ -фазным реверсивным вентильным преобразователем | 1989 |
|
SU1837378A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Замкнутый шаговый электропривод | 1984 |
|
SU1259465A1 |