щей скоростью путем регулирования yi па рассогласования между результирующим вектором токов в фазах и положением ротора и производят запись временных диаграмм фазных токов и положения вала двигателя, по которым определяют зависимость фазных токов от положения вала двигателя.
Описьшаемый способ поясняется на примере двухфазного шагового электродвигателя с датчиком положения, изменение скорости которого путем регулирования угла рассогласования между результирующим вектором токов в фазах и положением ротора; достигается за счет включения его в автоматическую релейную систему регулирования скорост
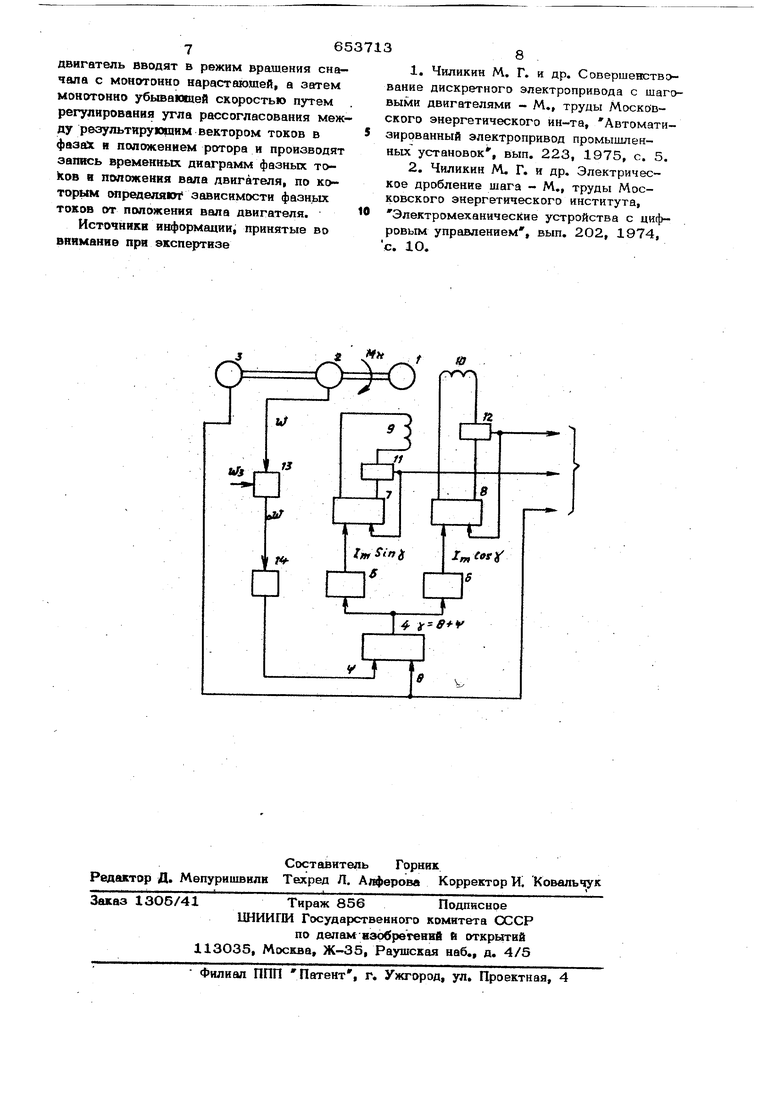
На чертеже приведена структурная схема системьи
На валу двухфазного шагового электрдвигателя 1 установлены датчик скорости 2 и датчик положения 3, подключенный своим выходом к первому В.ХОДУ сумматора 4.
Выход сумматора связан с входами функциональных преобразователей 5 и 6, выходы которьк соединены с входами, усилителей мошности 7 и 8. К выходам этих усилителей подключены фазы 9 и 10 двигателя и датчики тока 11 и 12. Выходы датчиков тока связаны с входам обратной СВЯЗИ по току усилителей мошности н аходами регистрирующих приборов.
Выход датчика скорости 2 соединен с одним из входов схемы сравнения 13, на Другой вход которой подается сигнал tiW-j , определяющий требуемый закон изменения скорости двигателя. Выход схемы сравнения 13 соединен со входом релейного элемента 14, выход которого связан со в торым входом сумматора 4. Выход датчика положения 3 подключен также к регистрирующему прибору.
Калибровка шагового электродвигат&ля производится следукнцим образом.
Предположим вначале, что обратная связь по скорости отключена (на вторбм входе сумматора 4 сигнал. Ч О). На первый вход сумматора подается сигнал О от датчика положения, с выхода сумгматора он поступает на входы функциональных преобразователей 7 и 8. Эти преобразователи образуют на своих вььходах сигналы в
и
где Q - угол поворота ротора двигателя Под действием этих сигналов возникнут соот ггствующие токи в фазах 9 и 10
двигателя, так как усилители мощности 7 и 8 с токовыми датчиками 11 и 12 представляют собой автоматические системы поддержания заданных значений токов.
Датчик положения должен быть так установлен по отношению к валу двигателя, чтобы при разомкнутой обратной связи по скорости угол рассогласования между результирующим вектором фазных токов и положением ротора двигателя, то есть между осями магнитных полей статора и ротора, равнялся нулю (Ц О).
В этом случае у двигателя, имеющего синусоидально распределенные магнитные поля в воздушном зазоре и для которого справедливо вьфажение
Мдд 1 -К 09в51П(в+Н)-в1ИвСОЗ (e-tV)
1
,
где М дв - электромагнитный момент двигателя;
1„ - амплитуда тока в фазе;
j - коэффициент пропорциональЛА
ности.
Из формулы следует, что введение постоянного утла рассогласования V при заданной амплитуде фазных токов идеализированном случае вызывает появление неизменного движущего момента и электрическая машина работает в режиме бесконтактного двигателя постояного тока. Задание угла рассогласования между осями магнитных статора и ротора путем подачи сигнала Ч на второй вход сумматора 4 обеспечивается за счет TorOj что датчик положения 3 . жестко связан с валом двигателя 1 и его сигнал 0 определяет положение вектора магнитного поля ротора, а положение вектора магнитного поля статора определяется углом Jf Э У , поскольку фазы двигателя питаются токами, результирующий вектор которых в механических угловых единицах совпадает с . вектором магнитного поля статора. Сигнал J образуется в результате алгебраического суммирования сигнала & , получаемого от датчика положения, и задаваемого сигнала . Следует отметить, что для обеспечения технической реализации функциональны.х преобразователей 5 и 6, преобразующих линейно изменяющийся сигнал в синусоиду и косинусоиду соответственно, сигнал & от датчика должен изменяться по пилообразному закону в функции угла положения вала двигателя, гфичем период пилы должен совпадать с пространстве ным периодом магнитного поля статора двигателя. Периодизация сигнала &, которая либо применением соответствующего датчика, либо его предварительным преобразованием при помощи стандартных методов вычислительной тахники, позволяет произвести суммирование углов 0 и Ц перед подачей их на входы функциональных преобразователей 5 и 6. Это возмож но благодаря тому, что угол Ц изменяегся в ограниченных пределах (меньших пространственного периода магнитного поля статора двигателя). Таким образом, при разомкнутой цепи обратной связи по скорости система представляет собой бесконтактный двигатель постоянного тока с питанием фаз синусоидальными токами и возможностью регулирования движущего момента за счет изменения угла рассогласования между векторами магнитных полей статора и ротора. В идеализированном случае для двигателя с синусоидальньп д распределением магнитных полей обеспечивается постоянство электромагнитного момента и независимость его от утпа поворота ротора е- при Y constВ реальных двигателях наличие высших пространственнх гармоник магнитных полей приводит к появлению пульсирующих составляюших момента, которые зависят от угла 0 . В описываемой системе они компенсируются путем изменения угла рассогласованияЧ , которое, в конечном счете, приведет к отклонению формы токов в фазах двигателя от той, которая имела бы место в идеализированном случае. Изменение угла М про изводится при поддержании заданного закона изменения скорости ш релейной системы регулирования. При зак«.1кании отрицательной обратной связи по скорости восстанавливается связь между выходом репейного элемента 14 и вторым входом сумматора 4, На выходе релейного элемента появляется сигнал V , который может принимать лишь экстремаль ные значения и -V, {практически выполняется условие электрических радианов). В релейной системе регулирования скорости токи в фазах двигателя подвергаются частотной и широтно-импульсвой модуляции. При помощи фильтров нижри.х частот (на чертеже не показаны) производится демодуляция фазных токов которые регистрируются приборами. Посредством способа калибровки шагового электродвигателя можво зарегист рировать форму фазных токов в функции положения вала при поддержании заданного закона изменения скорости двигателя, например линейного. Действительно, если двигатель нагружен постоянным моментом АЛц, то задавая постоянную скорость UJ COnStnoлучим в установившемся режиме С ЯВ ср--Мн. Так как релейная системаг41нвариантна к возмущениям момента, то при постоянстве момента нагрузки пульсации электромагнитного момента двигателя будут скомпенсированы соответствующими изменениями формы фазных токов. Однако обеспечение неизменности Mt мента в пределах долей оборота вала двигателя представляет собой сложную техническую задачу. Эту трудность можно преодолеть, если установить на валу двигателя маховик с известным Mt ментом инерции и задать монотонно возрастающий и монотонно убывающий закон изменения скорости, в частном случае линейный закон изменения скорости с постоянным ускорением н замедлением вала двигателя. При этом ЛЛлмн ° «) J - суммарный момент инерции; М дци- динамический момент. Таким образом, двигатель будет наружен неизменным по величине динаическим моментом. Использование описанного способа алибровки шагового электродвигателя беспечивает значительное уменьшение ремени калибровки и ее упрощение, ак как позволяет получить непосредственно зависимость фазных токов от вреени или положения вала двигателя. Формула изобр е тения Способ калибровки шагового электровигателя путем подачи на его , фазы оков и регистрации положения вала двиателя датчиком положения, отлиающийся тем, что, с целью овышения производительности труда.
двигатель вводят в режим вращения сначала с монотонно нарастаюшей, а затем монотонно убывающей скоростью путем регулирования угла рассогласования между результирующим вектором токов в фаза:х н положением ротора и производят запись временных диаграмм фазных тоkOB в положения вала двигателя, по которь1м tЯIpeдeляюf зависимости фазных токов от положения вала двигателя.
ИСТОЧНИКЕ информации, принятые во внимание при экспертизе
1.Чиликин М. Г. и др. Совершенствование дискретного электропривода с шаговыми двигателями - М., труды Московского энергетического ин-та, Автоматизированный электропривод промышленных установок. Вып. 223, 1975, с. 5.
2.Чиликин М. Г. и др. Электрическое дробление шага - М., труды Московского энергетического института, Электромеханические устройства с цифровым управлением , вып. 2О2, 1974,
с. 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым электродвигателем | 1977 |
|
SU736333A1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU936340A1 |
| Замкнутый шаговый электропривод | 1984 |
|
SU1259465A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1986 |
|
SU1403332A1 |
| Устройство для управления шаговым электродвигателем | 1981 |
|
SU1032584A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
i
uf
«г
1Л
itf. «
сз
8
. т
4 Si-V
6
