(54) СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ УГЛА ОПЕРЕЖЕНИЯ ЗАЖИГАНИЯ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Электронная система зажигания | 1978 |
|
SU740972A1 |
| Электронный регулятор угла опережения зажигания | 1977 |
|
SU738132A1 |
| Система зажигания с электроннымАНАлОгОВыМ РЕгулиРОВАНиЕМ углАОпЕРЕжЕНия зАжигАНия B фуНКцииКОМплЕКСА пАРАМЕТРОВ | 1979 |
|
SU808684A1 |
| Устройство для регулирования начала повторных операций | 1982 |
|
SU1021802A1 |
| Система зажигания с электронным регулиро-ВАНиЕМ MOMEHTA иСКРООбРАзОВАНия | 1976 |
|
SU847940A3 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ОПЕРЕЖЕНИЯ ЗАЖИГАНИЯ К ДВИГАТЕЛЮ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2065073C1 |
| Устройство регулирования запасаемой энергии в первичной обмотке катушки зажигания | 1986 |
|
SU1498934A1 |
| Устройство для контроля параметров дизеля | 1989 |
|
SU1636708A1 |
| Устройство для измерения установочного угла зажигания в двигателях внутреннего сгорания | 1981 |
|
SU983303A1 |
| Бесконтактная система зажигания | 1979 |
|
SU821731A1 |
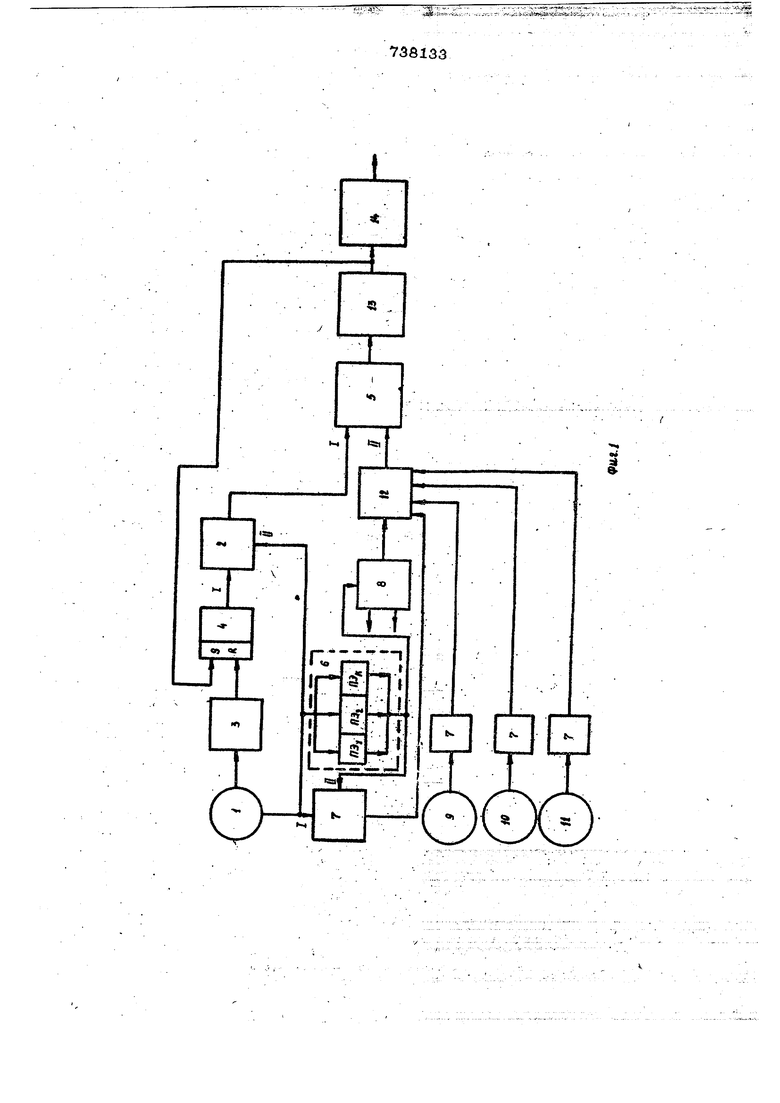
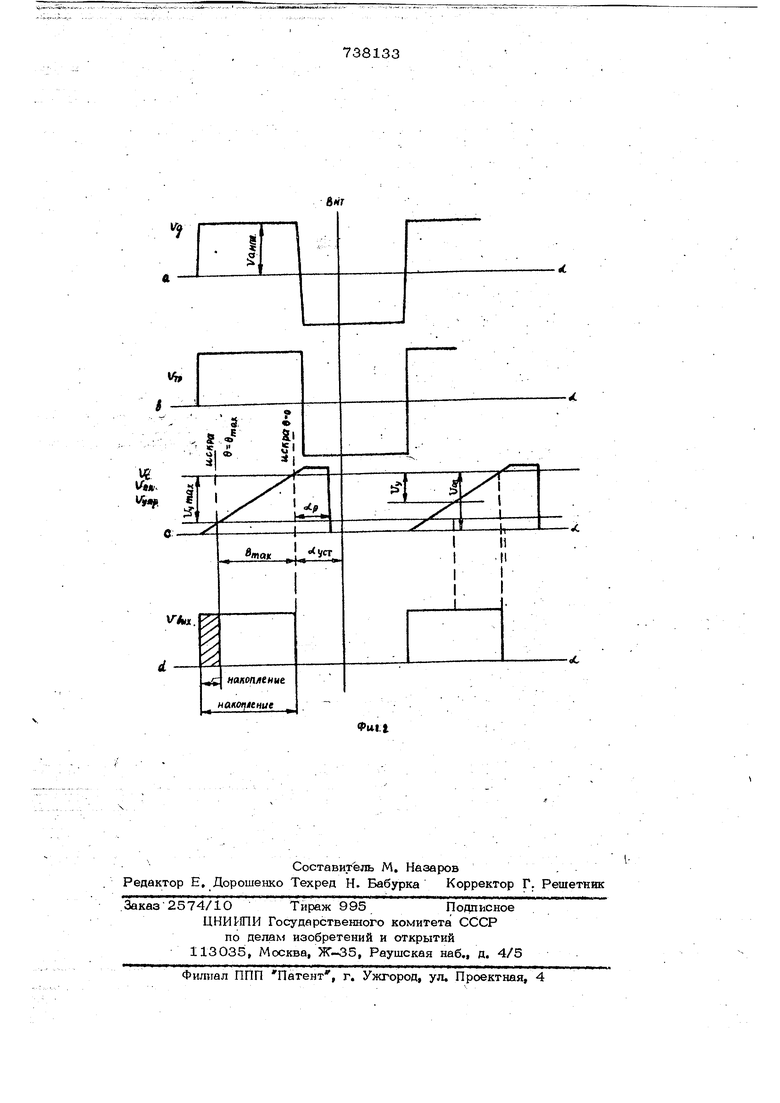
Изобретение относится к системам зажигания поршневых двигателей внутреннего сгорания, в частности к системам элек тронного аналогового регулирования угла опережения по комплексу параметров и может быть использовано в автомобиле- строении для моделей с улучшенными показателями по токсичности и Экономичности. Известны элёктронные системы зажигания с автоматическим опережением момента зажигания, реализующие Способ регулирования, основанный на изменении напряжения заряда хронирующетЧ) конденсатора с помощью уровня корректирующего напряжения-функции частоты вращения. Изменение временной задержки по заданному закону обеспечивв.ет требуек ую характрис тику угла опережения в функции частоты вращения. Главными функциональными блоками системы зажигания, реализующими данный способ являются генератор пилообразного напряжения-фантастрон и блок программы уровня корректирующего напря кения. Система имеет два режима работы: режим пуска в диапазоне частот вращения и режим регулирования угла оперёження - -ЙЙШШон -Чаетот вращенм К ftmcu l. Недостатком этой системы является , что она имеет частотные ограничения и инерционность, а также ограниченные вЬзможнос: т и дйя введения доп олн иа;е льных параметров регулирования. Наиболее близким по технической сущности к предлагаемому является электронньгй регулятор опережения зажигания, который реализует способ автоматического регулирования угла .оаережения зажигания основанный на сравнении в коК тпараторе постоянного уровня напряжения и пилообразного напряжения интегратора, мгновенные значения которогопропорциональны углу поворота коленчатого вала и смещены эквидистантно в зависимости от комплекса параметров и осуществляющий формирование сигналов управления ИнТёграТб738133pa, рогулйрбеание и коммутацию интегратора, содержащий датчик положения и частоты вращения коле;ичатоГ6 вала и датчики лЛраметров режимов работы двигателя, соединенные через триггеры-формирователи и блоки программ с сумматором, интегратор, входы которого соединены с датчиком по;йожения и частоты через комплекс блоков преобразователей, а выход - с первым входом компаратора, источник постоянного уровня, соединенный выходом со вторым входом компаратора, одновибратор и блок управления зажиганием-усилитель . мо цности и выходной каскад 2. Недостатком такого устройства является то, что для получения уровня напряжения, пропорпионально скорости вращения коленчатого вала двигателя, используется цепочка блоков, состоящая из триггера , Шмитта, одновибратора и усреднителя. Такая схема обладает значительной инёрционностью, что особенно ощутимо в динамических режимах разгона и торможения двигателя. Кроме того, такое устройство не обеспечивает возможности регулирования во всем диапазоне оборотов двигателя, поэто му необходим специальный канал для обес печения неизменного момента искрообра- зования в диапазоне малых оборотов двигателя. Фаза сигнала коммутирующего интегратора соответствует фазе выходного сигнала датчика, что ограничивает возмож ности регулирования фазы, пилообразного напряжения интегратора. Цель изобретения - увеличение точности регулирования угла опережения зажигания в динамических режимах работы двигателя и упрощения схемы.,-. Поставленная цель достигается тем, что в способе автоматического регулиро- .вания угла опережения зажигания, основан- НОМ на сравнении в компараторе постоян- ного уровня напряжения и пилообразного напряжения интегратора, мгновенные значения .которого пропорциональны углу пово{эЪта коленчатого вала и смещеньг эквидистантно в зависимости от комплекса параметров, и осуществляющем фор ирование с№11алов управления интегратора, регулирование и коммутацию интегратора, фор Km He cWtofta l/liiDami ffl WfyerynHpoBnHnsiинтегратора осуществляется синхронно с частотой вращения коленчатого вплп путем безынерционного преобразования сигнала датчика в прямоугольный им- пульс напряжения с амплитудой, меняю.1110 НС я в зависимости от. частоты вращения по линейному закону, а в процессе коммутации интегратора сброс интегратора осуществляется задним фронтом сшнала с компаратора, сдвинутым по времени на постоянную величину. Такой способ осуществляется устройством автоматического регулирования угла опережения зажигания, содержащим датчик положения и частоты вращения коленчатого вала и датчика параметров режимов работы двигателя, соединенные через триггеры - формирователи и программные устройства с сумматором, интегратор, i входы которого соединены с датчиком положения и частоты, а выход - с первым входом компаратора, источник постоянного уровня, соединенный выходом со вторым входом компаратора, одновибратор и блок управления зажиганием-усилитель мощности и выходной каскад, причем да-п j „сложения и частоты вращения колен атого вала выполнен в .виде безынерцион преобразователя, обеспечивающего на входе прямоугольные импульс, напряженин с амплитудой.меняюшейбя в зависимости от частоты по линейному закону. Кроме того, в устройство автоматического регулирования введены RS -триггеркоммутатор и дешифратор команд, причем датчик соединен с R - входом триггераKOMh/tyTaTopa через триггер-формирователь и со входом дешифратора команд, выход которого соединен со.вторым входом программного устройства и входом источника опорного уровня, S -вход триггера - коммутатора соединен с выходом компаратора через одновибратор,.. . Поставленная цель достигается также и тем, что безынерционный преобразователь вьшолнен на базе магнитной системы дуалеина. На фиг. 1 представлена структурная электрическая схема устройства, реализующего способ автоматического регулиров«1™ угла опережения зажигания; на фиг.2временные диаграммы, поясняющие сущность способа,. Устройство автоматического регулирования угла опережения зажигания, реализующее способ, содержит датчик 1 положения и частоты вращения коленчатого вала двигателя, вьшолненныйкак дуалсин и соединенный с интегратором 2 через триггерформирователь 3 и R - входТриггера-коммутатора 4. Выход интегратора 2 соединен с первым входом компаратора 5. Датчик положения и частоты соединен также со входом дещифратора 6 команд и пер573S1336
вым входом блоков 7 программ. Выходнрль, интегратор 2 работает на заряд и
дешифратора б команд соединен со вто-его хронирующий конденсатор заряжения
рым входом одного из блоков 7 и со вхо- U0 при постоянном токе заряда, что обес- дом корректирующего сигнала источникапечива линейную зависимость напрямсе8 онорного уровня. Датчики нагрузки 9, s ния Заряда во времени. Таким образом натемпературы 1О и других параметров 11чало работы интегратора 2 совпадает с
соединены со входами блоков 7 программ, фазой переднего фронта импульса с датчи- выходы которых соединены со входом сум- ка UQ-- Сброс интегратора 2 осуществляетмаТора 12.ся при подаче на S -вход RS -триггераВыход источника 8 опорного уровня 10 коммутатора 4 команды на сброс, которая также соединен со входом сумматора 12, йоступаёт пд йстечейии постоянного фиквыход которого соединен со вторым вхо- , сйровайноговремени после fo feнтaиcкpoдом компаратора 5, Выход компаратораобразования,
5 соединен со входом одновибратора 13,Сигнал с датчика 1 поступает одновревыход которого соединен со входом блока 5 менно на второй вход интегратора 2. Та- 14 управления зажиганием-усилителякий образом, интегратор 2 производит инмощности и с S - входом -триггера- тегрирование напряжения прямоугольной коммутатора.формы, с амплитудой, меняющейся от часПредлагаемый способ включает форм1 тоты по линейному закону, и на выходе рование сигнала напряжения прямоугольной 20 интегратора 2 формируется пилообразное формы с амплитудой, меняющейся в функ- йапряжение Uc стабильное по фазе и с неции частоты по линейному закону, осущест изменной амплитудой пилы в функции часвляемого синхронно С частотой вращения;тоты вращения, т.е. фронт полученного
интегрирование сигнала напряжения прямо- сигнала напряжения линеен по углу повоугольной формы с целью получения сигна- 25 рота коленчатого вала и не меняется во ла пилообразного напряжения с фронтомвсем диапазоне оборотов,
пилы, линейным по углу, крутизна кото-Одновременно сигнал датчика 1 постурого неизменна в функции частоты; форми- пает на дешифратор 6 команд и через блорование сигнала опорного уровня} сумми- ки 7 программ на сумматор 12. На сумрование сигналов коррекции опорного уров- матор 12 подаются сигналы с датчиков ня с целью формирования уровня и посто- 9, 10 и 11 других параметров,преобразоянного напряжения, абсолютное значение ванные в соответствующих блоках 7 прокоторого зйвисит от комплекса параметров :грамм и напряжение опорного уровня Uon по заданному закону, сравнения пилообраз- от испочника 8 постоянного напряжения, ного напряжения - линейной функции угла 35 Сумматор 12 производит операцию сложес уровнем постоянного напряжения - за-ния и выдает сигнал в виде уровня постоданной функцией частоты, нагрузки, тем- янного напряжения Uv)f,p заданной функции пературы и других параметров и выработ- комплекс параметров. Сигнал с дешифра- ку сигнала на искрообразование. тора команд 6 дискретно корректирует проСпособ регулирования угла опережения грамму. Пилообразный, линейный по углу зажигания реализуется следующим обра- , и неизменный по всем диапазоне оборотов зом. по амплитуде сиГМДС йнтёг) 2 (J
Датчик 1 положения и частоты враще- подается на один из входов компаратора ния коленчатого вала вырабатывает импуль- 5, на другой вход подается постоянное насы напряжения Uо, прямоугольной формы 5 пряжение Uyj,p уровень которого - суммар(фиг. 2а) с амплитудой, линейно завися- ная функция комплекса параметров. Сигнал щей от частоты вращения, которые пода- на искрообразование компаратора 5 появлявэтсй на триггер-формирователь, програм- ется в момент равенства мгновенных зна- мное устройство 7 и дешифратор 6 команд. чёний пилообразного напряжения интегратоНа выходе формирователя 3 вырабаты- ра 1), и уровня напряжения U j pСигнал ваются импульсы напряжения йрямоуголь- на искрообразование запускает одновибраной формы UTP с постоянной амплитудой ор 13, с выхода которого через фикси(фиг. 2в), которые подаются на R-входрованное время задержки Ь 3 на S вход
R5 -триггера-коммутатора 4, Триггер -триггера поступает сигнал на сброс,
управляет работой интегратора 2. Когда На фиг. 2а приведено коммутирующее нана выходе триггера 4 - логическая еди- Р ®.-колл вы кодного каскада,
ница, интегратор 2 работает на разряд, Йспошззование изобретения позволит
когда на выходе триггера 4 - логический расширить диапазон регулирования по углам регулирования и оборотам, повысить синхронность системы, повысить вторичные напряжения за счет увеличения времени накопления во всем диапазоне оборотов, упростить схему. Это способствует улучшению показателей современных двигателей внутреннего сгорания по токсичности и экономичности в динамических режимах.
Известно, что наибольшее количество токсических компонентов двигатель выделяет в динамических режимах ускорения и торможения. Инерционность системы приводит к нарушению условий оптимальности регулирования и, как к неизбежному еледствию, ухудшению показателей по токсичности и экономичности.
Увеличение токсичности регулирования в динамических режимах, достигаемое за счет синхронизации системы и двигателя в широком диапазоне углов регулирования и оборотов, позволяет обеспечить оптимальность работы двигателя с точки зрения экономичности и токсичности.
1 ормула изобретения
с сумматором, интегратор, входы которого соединены с датчиком положения и частоты, а выход - с первым входом компаратора, источник постоянного уровня, соединенный выходом со вторым входом компаратора, одновибратор и блок управления зажиганием- - усилитель мо.щности и выходной каскад, отличающееся тем, что датчик положения и частоты вращения коленчатого вала выполнен в виде безынерционного преобразователя, обеспечивающего на входе прямоугольные импульсы напряжения с амплитудой, меняющейся в зависимости от частоты по линейному закону, а в схему введены R S -триггер-коммутатор и дешифратор команд, причем датчик соединен с R-входом триггера-коммутатора через триггер-формирователь и со входом дешифратора команд, выход которого соединен со вторым входом одного из блоков программ и входом источника опорного уровня, 5 -вход триггера-комутатора соединен с вькодом компаратора через одновибратор.
Источники информации, принятые во внимание при экспертизе
501475, кл, Н 03 К, 5/153, 1976.
73S133
