- . t Изобретение относится- к измерительной технике, может быть использовано при построении быстродействующих компенсационных устройств полярно-координатноготипа, предназначенных для измерения комплексных величин. Известен способ уравновешивания в полярно-координатных автокомпенсаторах (ПКА), заключающийся в усилении сигнала рассогласования Up между измеряемым Un и компенсирующим 0 сигналами, разложении Up с помощью двух фазочувствительных детекторов на две ортогональные составляющие: Upm - синфазной UK и Up.квадратурной UK, которые используются как управляющие сигналы для регулировок соответствен но по каналам «модуль и «фаза. При UjM 0 происходит увеличение mod UK, при ирм О - уменьшение. Анал огично меняется фаза U в зависимости от Jfif 1. Этот способ реализован, например, в цифровом полярном-координатном автокомпенсаторе в 2. Существующий способ уравновешивания допускает регулировки по каналу «модуль В неправильном направлении даже при идеальной настройке векторов фазовой чувствительности каналов, когда в узлах прибора отсутствуют фазовые искажения, что существенно снижает быстродействие полярно-координатных автокомпёнсаторов. Цель изобретения - повышение быстродействия цифровых полярно-координатных автокомпенсаторов. Эта цель достигается тем, что при уравновещивании в следящих полярно-коорди натных автокомпенсаторах переменого тока известным способом, состоящим в усилении сигнала рассогласования, разложении его на две составляющие, первая из которых синфазна, а вторая ортогональна компенсирующему напряжению, которые используются как управляющие сигналы соответственно по каналам «модуль и «фаза вводится анализ знака управляющего сигнала по каналу «модуль, и, если последний меньще нуля, уменьшение модуля компенсирующего сигнала производится лишь тогда, когда рассогласование по каналу «фаза отработано.
При известном способе в случае Upw О регулировка происходит по каналу «фаза, пока не отработается . Из 1
Up- Uu Со5(
Upif Uu Sin(vp,-vp,
где фу, (p - фазы измеряемого и компенсирующего сигналов.
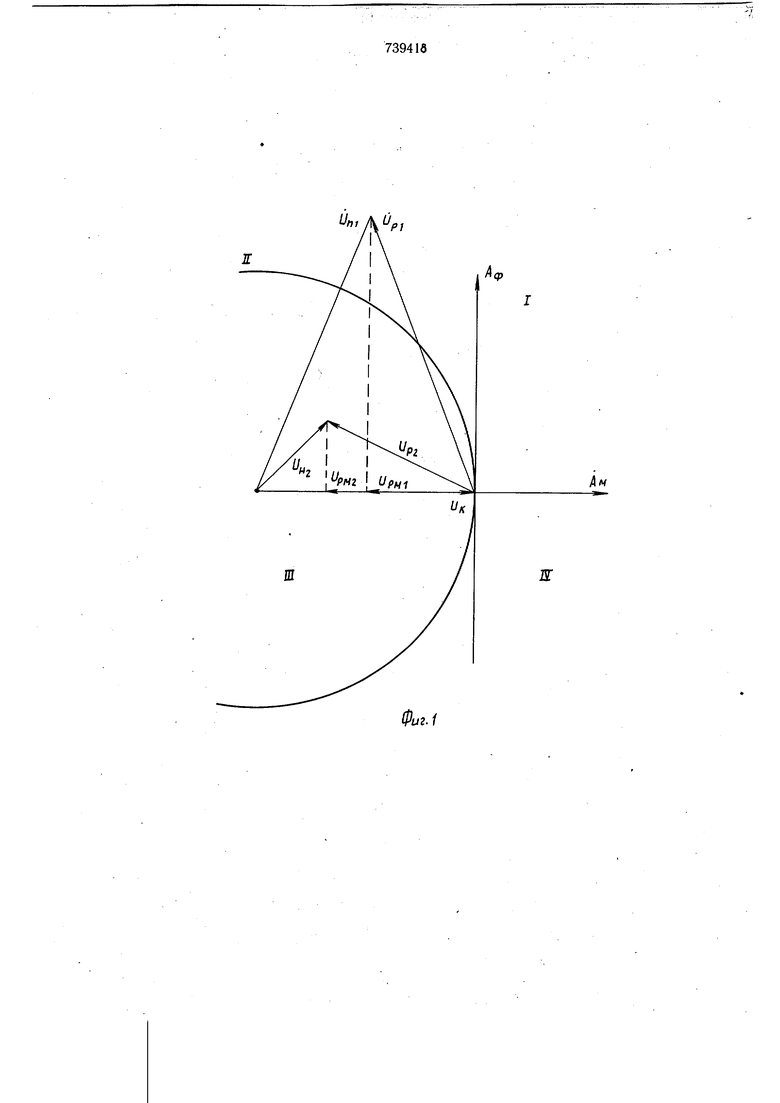
При предлагаемой организации процесса уравновешивания, при Upt() О, Црм Uu т. е. в случае , эта линеаризация действительно свидетельствует о необходимости уменьшения UKВекторная диаграмма, поясняющая способ, представлена на фиг. 1. В качестве примера реализации предлагаемого способа на фиг. 2 представлена схема ПКА.
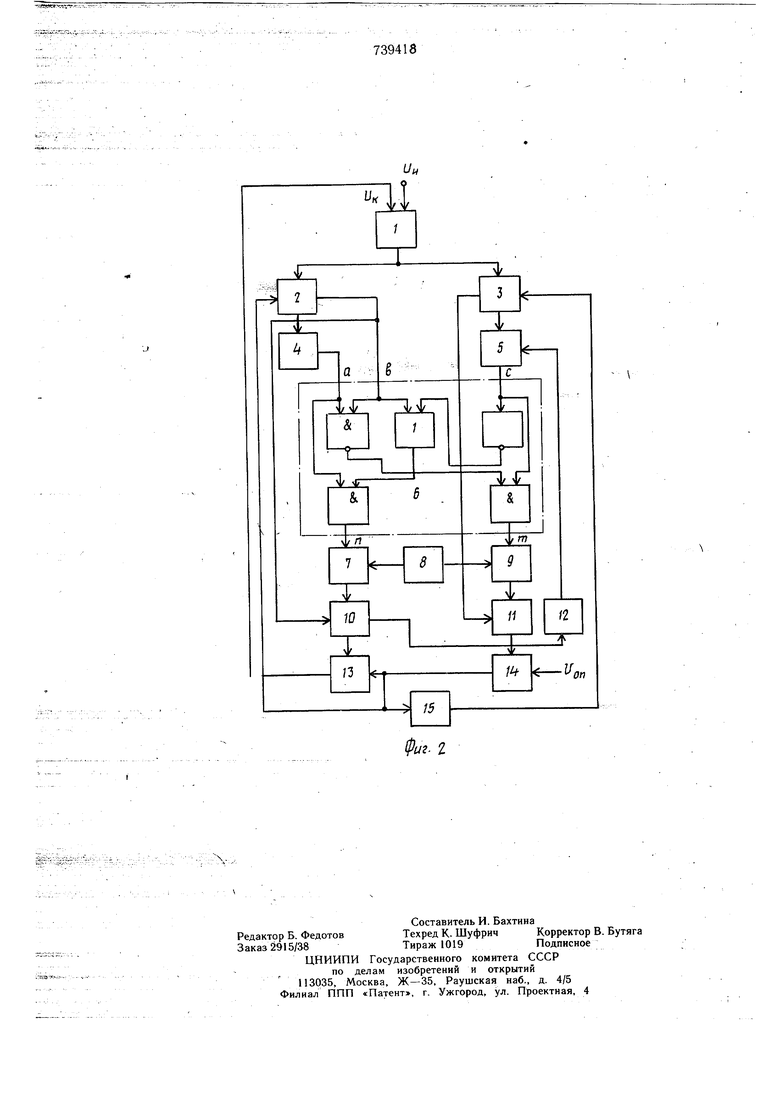
Схема состоит из усилителя сигнала рассогласования (УР) 1, фазочувствительных детекторов каналов «модуль (ФЧД) 2 и «фаза (ФЧД(р) 3, пороговых элементов каналов «модуль (ПЭц,) 4 и «фаза ( ) 5, логической схемы управления (ЛСУ) 6, ключа канала «модуль (Км) 7, генератора тактовых импульсов (ГТИ) 8, ключа канала «фаза (К ) 9, реверсивных счетчиков каналов «модуль (РС,) 10 и «фаза (PCip) 11, преобразователя «код-код 12, делителя напряжения (ДН) 13, дискретного фазовращателя (ДФ) 14 и 90°-ной фазосдвигающей цепи 15.
Устройство работает следующим образом, Напряжение рассогласования Up Оц Оц через усилитель 1 подается на два фазочувствительных детектора 2 и 3. ФЧД 2 формирует управляющий сигнал для канала «модуль (Upt), который является проекцией Up на. вектор фазовой чувствительности (ВФЧ)Ам, синфазный с (фиг. 1). В зависимости от полярности Ом на выходе ФЧДм 2 имеет сигнал «О или «1, который подается на вход, управляющий реверсом, РСм 10. Кроме того, этот сигнал поступает на вход ЛСУ.
Выходы ФЧД„ 2 и ФЧД ц, 3 связаны с пороговыми элементами nЭJ и ПЭ( происходит сравнение UpM и Upif с 6м и - величинами порогов срабатывания. При UpM &нНа выходе блока 4 сигнал «1, а в противном случае «О. Выход блока 4 также подан на ЛСУ (вход «а).
Таким же образом в канале «фаза формируется управляющий сигнал Ору , являющийся проекцией Up на ВФЧ канала «фаза А(р , который ортогонален UK (с помощью 90-градусной фазосдвигающей цепи 19). Знак ир(определяет направление уравновешивания фазы UK , для чего выход ФЧД 3 связан со входом управляющим реверсом РС(р 1. Информация на ЛСУ по каналу «фаза (вход «с) поступает с выхода блока 5, формирующего сигнал «1 (), или «О Up Ц) )
По принятому алгоритму ЛСУ должна обеспечить поочередное разрешение на прохождение импульсов ЛГТИ на РСм 10 и РС 11.
Один из возможных вариантов ЛСУ -приведен на фиг. 2.
В виде примера рассмотрим работу устройства для одного из возможных сочетаний входных сигналов. Предположим, что SIGNUpM 0 (на выходе блока 2 сигнал «О), ирм бм (на выходе блока 4 сигнал «1) и (на выходе блока 5 сигнал «1).
Согласно входным сигналам, в рассматриваемом случае п О и m О,т. к. ключ 7 заперт (на PC 10 импульсы с ГТИ не поступают) и ключ 9 открыт (импульсы с ГТИ поступают на PC 11). В результате сначала происходит регулировка фазы компенсирующего напряжения.
Предлагаемый способ, реализованный в описанном цифровом полярно-координатном автокомпенсаторе, обеспечивает быстродействие в 1,5-2 раза больще, чем в прототипе.
Формула изобретения
Способ уравновешивания в следящих полярно-координатных автокомпенсаторах переменного тока, состоящий в усилении сигнала рассогласования, разложении его на две составляющие, первая из которых синфазна, а вторая ортогональна компенсирующему напряжению и которые используются как управляющие сигналы соответственно по каналам модуль« и «фаза, отличающийся тем, что, с целью повышения быстродействия, вводится анализ знака управляющего сигнала канала «модуль, и, если последний меньше нуля, то уменьщение модуля компенсирующего сигнала производится лищь тогда, когда рассогласование по каналу «фаза отработано.
Источники информации,
принятые во внимание при экспертизе
1.Алиев Т. М., Мелик-Шахназаров А. М., Шайн И. Л. Автокомпенсационные измерительные устройства переменного тока. М., «Энергия, 1977, с. 25-128.
2.Авторское свидетельство СССР
№ 461376, кл. G 01 R 17/06, 1973 (прототип).
Uf,, Л
P
Ж
Фиг.1
фиг. г
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой полярно-координатный автокомпенсатор | 1978 |
|
SU706787A1 |
| Цифровой полярно-координатный автокомпенсатор | 1976 |
|
SU587403A1 |
| Цифровой полярно-координатный автокомпенсатор | 1978 |
|
SU779889A1 |
| Автоматический прямоугольно-координатный компенсатор | 1961 |
|
SU146872A1 |
| Способ наладки вторичных приборов | 1980 |
|
SU976411A1 |
| Способ регистрации момента компенсации измеряемого напряжения переменного тока и устройство для его осуществления | 1978 |
|
SU788011A1 |
| Цифровой полярно-координатный компенсатор | 1975 |
|
SU602868A1 |
| Электронный прямоугольно-координатный автокомпенсатор | 1962 |
|
SU151721A1 |
| Способ уравновешивания нулевых измерительных цепей переменного тока с двумя уравновешивающими органами | 1972 |
|
SU470747A1 |
| Автоматический полярно-координатный компенсатор | 1972 |
|
SU474747A1 |