для составляющей у
Д.. - аи sin f arctg --- + аЛ /
У ll+ ll sin f arctg -
Углы взаимосвязи контуров: для составляющей х
ujg arctg - - у
для составляющей у
а - I arctg -
/,
V
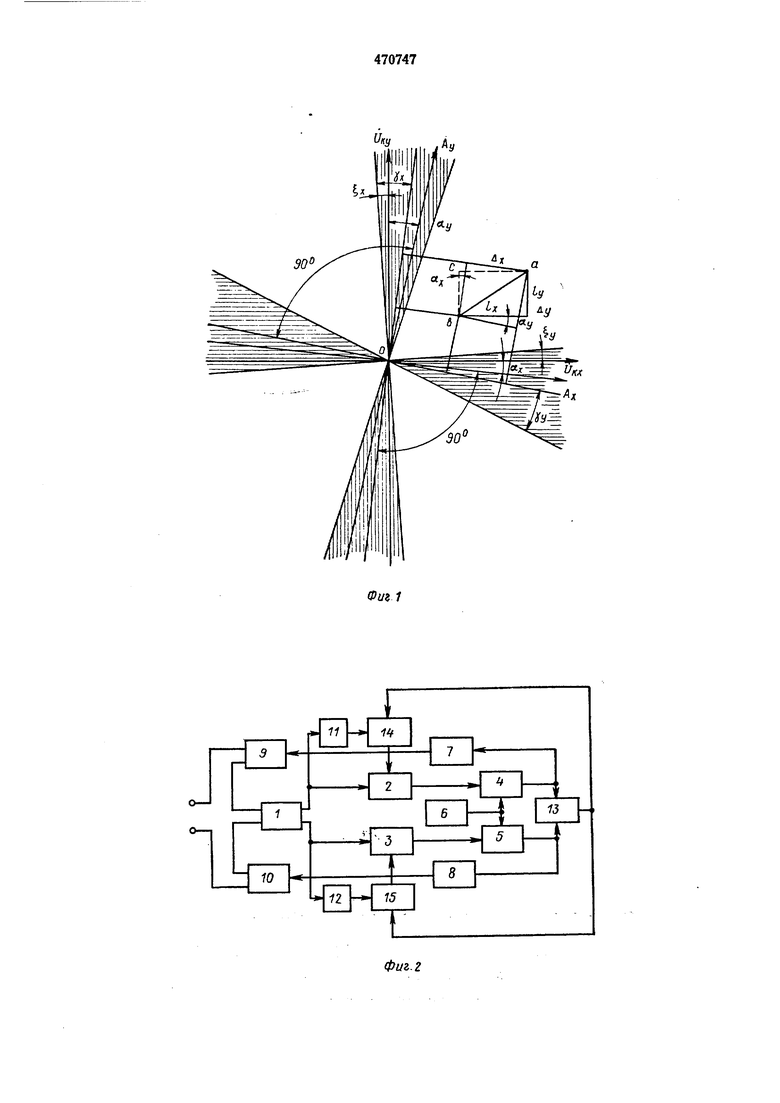
Для обеспечения устойчивости необходимо, чтобы участки нечувствительности по каждой составляющей перекрывали соответствующие области несоответствия. Поэтому углы ух(у под которыми расходятся нрямые, образующие границы участков нечувствительности, регулируют на каждом очередном шаге отработки так, что:
м (±) ( - ./4 ±
()
± 5(у} .+ч (у) ± (у) 1;
где угол х(у) - сколь угодно малый угол, представляющий собой запас устойчивости (при |х(у)0 система находится на границе устойчивости).
Таким образом, регулируя углы ух{у) описанным способом, можно учесть реальную, имеющую место в данный момент времени взаимосвязь контуров и поэтому расширить диапазон устойчивости, повысить точность и ускорить процесс уравновешивания.
Блок - схема автокомпенсатора, реализованного по предложенному способу, показана на фиг. 2, где:
1-усилитель сигнала разбаланса, 2 и 3 - фазочувствительные детекторы составляющих X и у соответственно, 4 и 5 - управляющие органы тех же составляющих,
6 - генератор тактовых испульсов, 7 и 8 - исполнительные органы, 9 и 10 - блоки компенсирующих напряжений f/kX и f/ky,
11 и 12 - фазочувствительные устройства выделения приращений по каждой из составляющих, 13 - логическое устройство,
14 и 15 - счетно-решающие устройства.
Цифровой автокомпенсатор работает следующим образом. Напряжение разбаланса Up, равное разности измеряемого t/« и комненсирующих f/kx и t/ky напряжений, подается на вход усилителя 1, затем на фазочувствительные детекторы 2 и 3, информация с которых поступает на управляющие органы 4 и 5. Последние управляют работой исполнительных
органов 7 и 8, пропуская импульсы от генератора 6 на ту или иную декаду каждого из них в зависимости от алгоритма, заложенного в системе. Исполнительные органы, коммутируя дискретные ступени в блоках компенсирующих элементов, вводят напряжения t/kx и (/kyПриращения на каждом из шагов уравновешивания выделяются при помощи устройств И и 12, представляющих собой дифференциальные фазочувствительные детекторы с запоминанием. Опорные напряжения этих фазочувствительных детекторов совпадают с опорными напряжениями соответствующих детекторов 2 и 3. Логическая схема 13 определяет, какая из декад работает по каждой из составляющих и выдает в счетно-решающие устройства 14 и 15 соответствующие дискретные
значения arctg - и У ll+ ll . Сюда
У(х}
же поступает информация о приращениях из блоков И и 12. Счетно-решающие устройства 14 и 15 управляют фазочувствительным, детекторами 2 и 3 описанным образом.
Предмет изобретения
Способ уравновешивания нулевых измерительных цепей переменного тока с двумя уравновешивающими органами, при котором шаги уравновешивания в каждом канале производят в соответствии со знаком сигнала, сформированного соответствующим фазочувствительным детектором, и прекращают, как только точка, соответствующая концу вектора разбаланса, окажется внутри заранее установленной области несоответствия знака сигнала на выходе фазочувствительного детектора знаку отклонения соответствующего уравновешивающего органа от его равновесного значения, отличающийся тем, что, с целью
увеличения допустимых фазовых нестабильностей, повышения быстродействия и точности, углы, под которыми расходятся прямые, образующие границы области нечувствительности, на каждом шаге отработки регулируют
так, чтобы они не превышали в каждом канале уравновешивания суммы двух углов, а именно: угла взаимосвязи контуров уравновешивания и угла, представляющего собой запас устойчивости.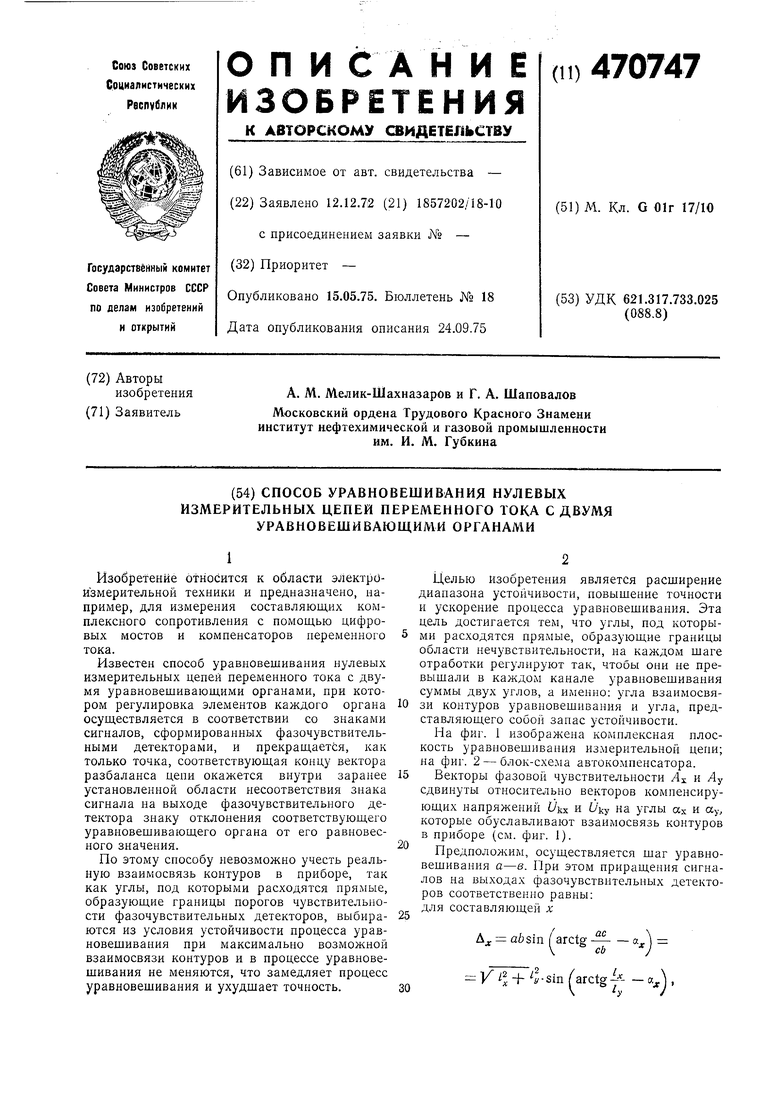
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УСТРАНЕНИЯ АВТОКОЛЕБАНИЙ В ДИСКРЕТНЫХ | 1969 |
|
SU243061A1 |
| СПОСОБ СЛЕДЯЩЕГО УРАВНОВЕШИВАНИЯ ЦИФРОВЫХ КОМПЕНСАТОРОВ ПЕРЕМЕННОГО ТОКА | 1969 |
|
SU251690A1 |
| Цифровой полярно-координатный автокомпенсатор | 1976 |
|
SU587403A1 |
| Способ автоматического уравновешиванияНулЕВыХ изМЕРиТЕльНыХ цЕпЕй пЕРЕМЕННО-гО TOKA | 1979 |
|
SU805185A1 |
| Весовой порционный дозатор | 1979 |
|
SU823889A1 |
| СТАБИЛИЗАТОР ПОСТОЯННОГО ТОКА | 1992 |
|
RU2037185C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УРАВНОВЕШИВАНИЯ НУЛЕВЫХ ИЗМЕРИТЕЛЬНЫХ ЦЕПЕЙ ПЕРЕМЕННОГО ТОКА С ДВУМЯ УРАВНОВЕШИВАЮЩИМИ ОРГАНАМИ | 1966 |
|
SU216124A1 |
| Цифровой полярно-координатный автокомпенсатор | 1978 |
|
SU706787A1 |
| УСТРОЙСТВО с кодовым выходом для ИЗМЕРЕНИЯ' ТЕПЛОЭНЕРГЕТИЧЕСКИХ ПАРАМЕТРОВ | 1966 |
|
SU189191A1 |
| СПОСОБ ОДНОНАПРАВЛЕННОГО УРАВНОВЕШИВАНИЯ НУЛЕВЫХ ИЗМЕРИТЕЛЬНЫХ ЦЕПЕЙ ПЕРЕМЕННОГО ТОКА | 1971 |
|
SU296046A1 |