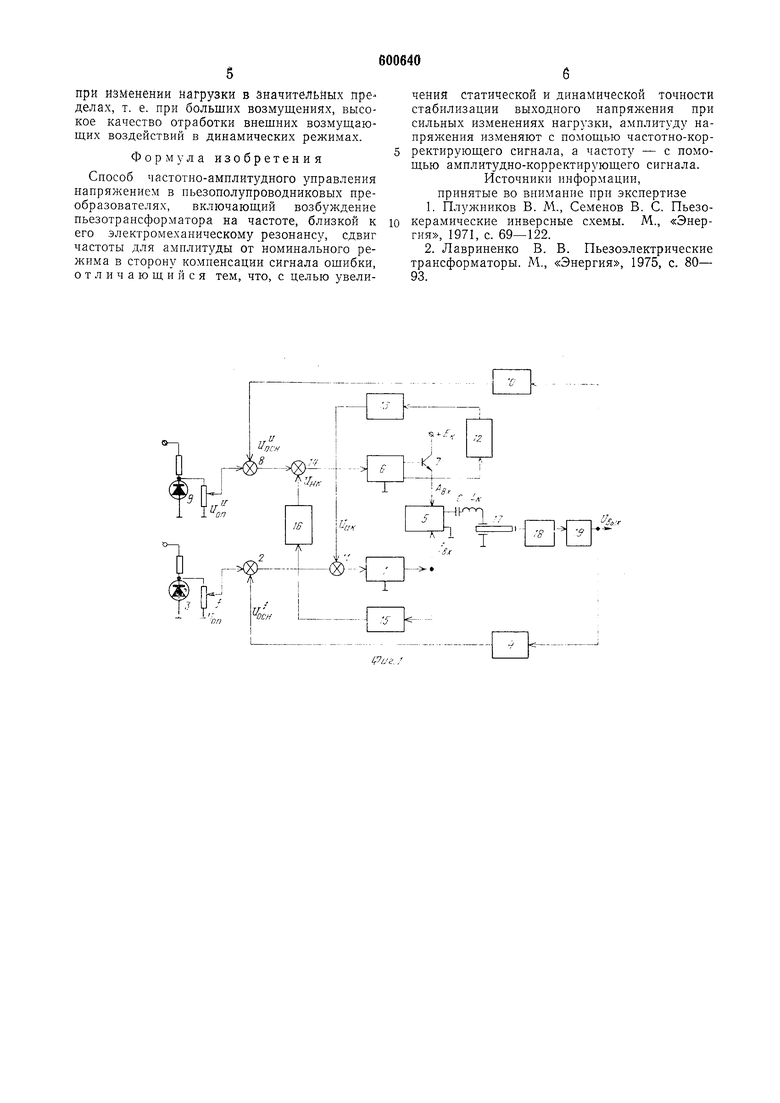
ности lid цепи йитания управляется по амплитуде питания от регулятора амплитуды 6 (через регулирующий транзистор 7). На входе регулятора амплитуды устаповлеп элемент сравнения 8, на который поступают опорный сигнал (с прецизионного стабилитрона 9), соответствующий номинальному напряжению возбуждения (при номинальной нагрузке на выходе преобразователя), и напряжения обратной связи по напряжению нагрузки (с датчика напряжения 10). Посредством элемента сравнения 11 в канал управления 1IT по частоте вводится с датчика амплитуды 12 через динамический формирователь 13 амплитудно-корректирующий сигнал Ьак- Посредством элемента сравнения 14 в канал управления Г1Т по амплитуде вводится частотно-корректирующий сигнал с датчика (преобразователя) «частота-напряжение 15 через динамический формирователь сигнала 16. Регулятор амплитуды b представляет собой регулятор на базе интегрального операционного усилителя с пропордионально-интегральнодифференциальным (ППД) законом регулирования. Регулятор частоты 1 является генератором, амплитуда напряжения на выходе которого линейно зависит от частоты (характерная особенность, обычно присущая задающим 1-енераторам частоты). Усилитель мощности по полумостовой или мостовой схеме нагружен через разделительный конденсатор и компенсирующую индуктивность на возбудитель ПГ Г, который через выпрямитель (или схему умножения) 18 соединен с нагрузкой 19.
Работа пьезополупроводникового преобразователя напряжения при предлагаемом способе взаимосвязанного частотно-амплитудного управления сводится к следующему.
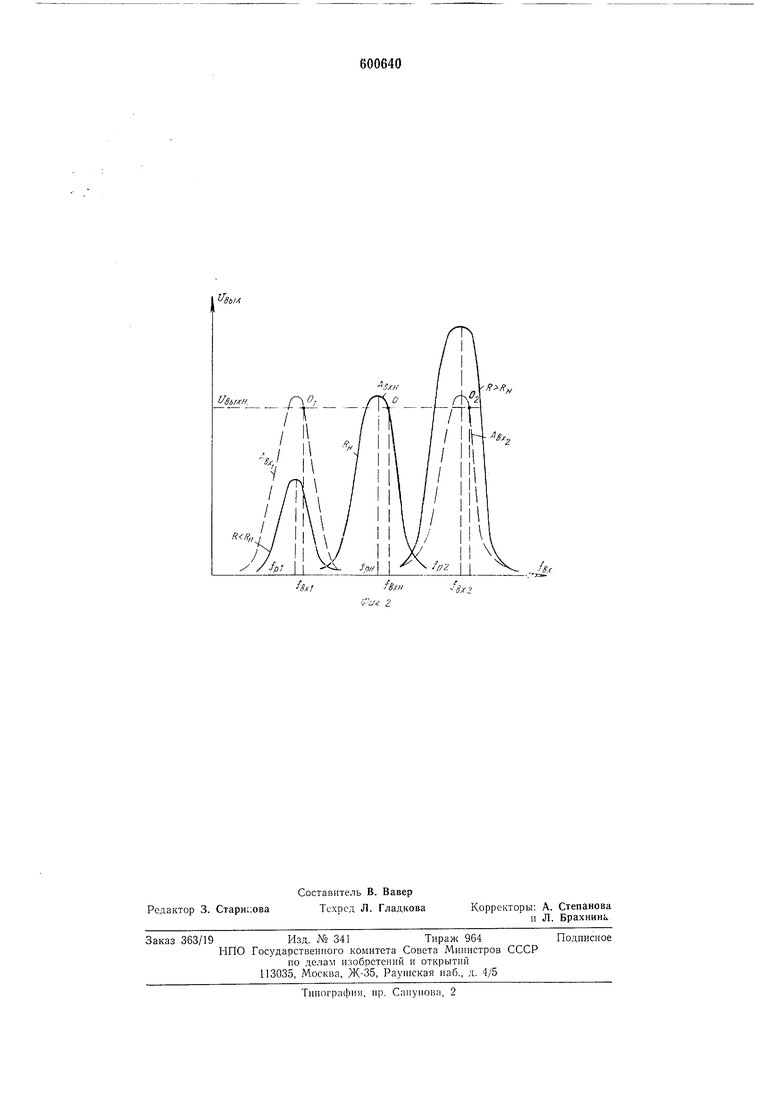
11ри действии сильных возмущений (значительное изменение тока нагрузки) у ОТ имеет место дрейф АЧХ: при резком уменьшении нагрузки (режим, близкий к.х.х.) АЧХ уходит вправо по резонансной частоте и вверх по амплитзде, при резком увеличении нагрузки (режим, близкий к.к.з.) АЧХ уходит влево по резонансной частоте и вниз по амплитуде имеется в виду дрейф АЧХ в разные стороны от согласованного номинального релшма работы ПТ (см. фиг. 2). Дрейф АЧХ влево сопровождается уменьп1ением резонансной частоты () и уменьшением напряжения на выходе нагрузки (ЬЕЫХ ВЫХ.Н) ; дрейф АЧХ Вираво сопровождается увеличеииемрезонансной частоты (/р2 /рн) и увеличением выходного напряжения (Свых.2 Ьвых;.11) Сигнал с выхода схемы 2 в отсутствии амплитудно-корректирующего сигиала бак управляет работой генератора 1, компенсируя незначительные отклонения по АЧХ ilT, связанные с дрейфом рабочей точки (слабые возмущения, например температурные или нагрузочные). Аналогично слабые возмущения компенсируются регулятором амплитуды 6 посредством отработки сигнала рассогласования с элемента сравнения 8 (при отсутствии частотно-корректирующего сигнала f/чк. При Действии сильных возмущений (значительные колебания тока нагрузки в широком диапазоне) стабилизацию выходного напряжения обеспечить не удается посредством автономного регулирования частоты и напряжения возбуждения ПТ, что приводит либо к срыву режима стабилизации (из-за изменения знака обратной связи ио каналу частоты, невозможности отработки значительного сигнала рассогласования) , либо к низкой статической и динамической точности стабилизации выходного напряжения. Введение частотно-корректирующего и амплитудно-корректирующего сигналов позволяет обеспечить благодаря взаимосвязанному направлеииому воздействию каналов на компенсацию отклонения выходного напряжения от заданного высокую точность стабилизации выходиого напряжения в широком диапазоне изменения нагрузки при сильных возмущениях. Например, при резком увеличении нагрузки (АЧХ смещается влево и вниз), под действием сигнала ошибки со схемы 2 регулятор частоты - задающий генератор 1 начииает уменьшать входную частоту возбуждения ПТ /вх (предполагается, что рабочая точка выбрана на правом склоне АЧХ и обеспечивается положительная обратная связь по каналу частоты от датчика напряжения 4). Одновременно сигнал рассогласования с элемента 8 (обратная связь по напряжению нагрузки, поступающая с датчика 1U, является отрицательной) воздействует на регулятор амплитуды 6 таким образом, что транзистор 7 увеличивает
амплитуду напряжения Лих. поступающего на усилитель 5 и, следовательно, на пьезотрансформатор 17. Амплитудно-корректирующий сигнал, соответствующий увеличенному значению Лвх, обеснечивает статическую и динамическую форсировку уменьшения /вх и смещения частоты на новую резонансную частоту (). Частотно-корректирующий сигнал, соответствующий уменьшенному значению /вх1 новой резонансной частоте, обеспечивает статическую и дипамическую форсировку увеличения амплитуды напряжения возбуждения Лвх Формирователи динамических сигналов 13, 16 обеспечивают упреждающие воздействия корректирующих связей с выходов соответствующих каналов (содержат пропорционально-дифференцирующие У С-цепи). Использование корректирующих связей с нерекрестных каналов регулироваиия соответственно амплитуды и частоты, несущих в себе информацию о действующих возмущениях, позволяет существенно уменьшить реакцию пьезополупроводникового преобразователя на изменение нагрузки в широком диапазоне.
Таким образом, реализация предлагаемого способа взаимосвязанного частотно-амнлитудного управления напряжения в пьезополупроводниковых преобразователях обеспечивает высокую статическую и динамическую точ5 пость стабилизации выходного иапряжения
при изменении нагрузки в эначителЬЁых пределах, т. 8. при больших возмущениях, высокое качество отработки внешних возмущаюш,их воздействий в динамических режимах.
Формула изобретения
Сиособ частотно-амплитудного управления напрял ением в пьезополупроводниковых преобразователях, включающий возбуждение пьезотрансформатора на частоте, близкой к его электромеханическому резонансу, сдвиг частоты для амплитуды от номинального режима в сторону компенсации сигнала ошибки, отличающийся тем, что, с целью увеличения статической и динамической точности стабилизации выходного напряжения при сильных изменениях нагрузки, амплитуду напряжения изменяют с помощью частотно-корректирующего сигнала, а частоту - с помощью амплитудно-корректирующего сигнала.
Источники информации, принятые во внимание при экспертизе
1.Плужников В. М., Семенов В. С. Пьезокерамические инверсные схемы. М., «Энергия, 1971, с. 69-122.
2.Лавриненко В. В. Пьезоэлектрические трансформаторы. М., «Энергия, 1975, с. 80- 93.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления выходным напряжением в пьезополупроводниковом преобразователе | 1977 |
|
SU720575A1 |
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |
| Способ управления выходным напряжением пьезополупроводникового источника питания | 1985 |
|
SU1249671A1 |
| Способ управления выходным напряжением в пьезополупроводниковом преобразователе | 1977 |
|
SU646392A1 |
| Способ управления преобразователемНА бАзЕ пьЕзОэлЕКТРичЕСКОгО ТРАНСфОРМА-TOPA | 1979 |
|
SU799052A1 |
| Управляющее устройство стабилизированного пъезополупроводникового источника питания | 1984 |
|
SU1241373A1 |
| Стабилизатор постоянного напряжения | 1979 |
|
SU800974A1 |
| Пьезополупроводниковый стабилизатор постоянного напряжения | 1980 |
|
SU926636A1 |
| Пьезополупроводниковый стабилизатор напряжения | 1984 |
|
SU1241369A1 |
| Стабилизированная система электропитанияНА бАзЕ пьЕзОТРАНСфОРМАТОРА | 1979 |
|
SU851687A1 |
PLг..
4М
кж,.
