одни входы которых подк почены к выходу датчика угла, другие входы компараторов соединены с соответствующими выходами источника пороговых напряжений, выходы элементов И подключены к входам элемеитр ИЛИ, выход которого соединен с входом триггера.
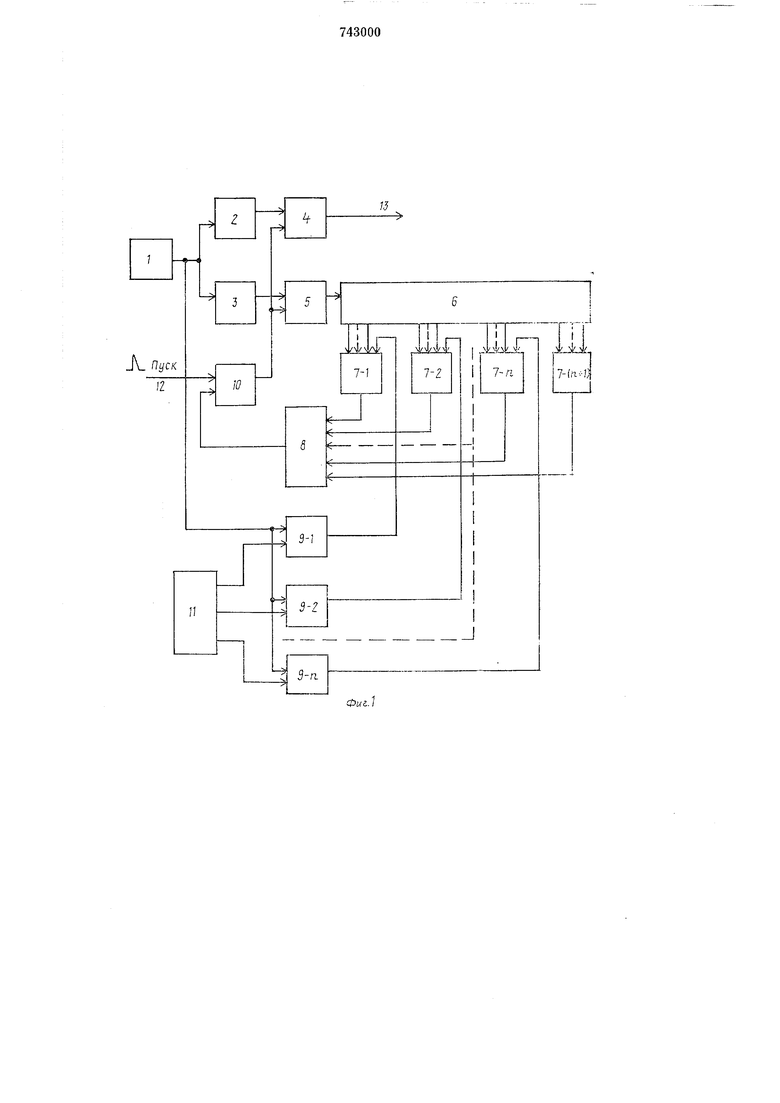
На фиг. 1 приведена структурная схема преобразователя угла поворота вала в код; на фиг. 2 показаны диаграммы, поясняющие его работу.
Преобразователь угла поворота вала в крд содержит (фнг. 1) датчик I угла, блок 2; преобразования напряжения в частоту с линейно-возрастающей зависимостью, блок 3; преобразования напряжения в частоту с линейно-убывающей зависимостью от входифго сигнала, элементы И 4 и 5, счетчик 6, (п+1) элементов И 7, элемент ИЛИ 8, п компараторов 9, триггер 10, источник И пороговых напряжений. Кроме того, на фиг. 1 показана шина «Пуск 12 и выходная щина 13.
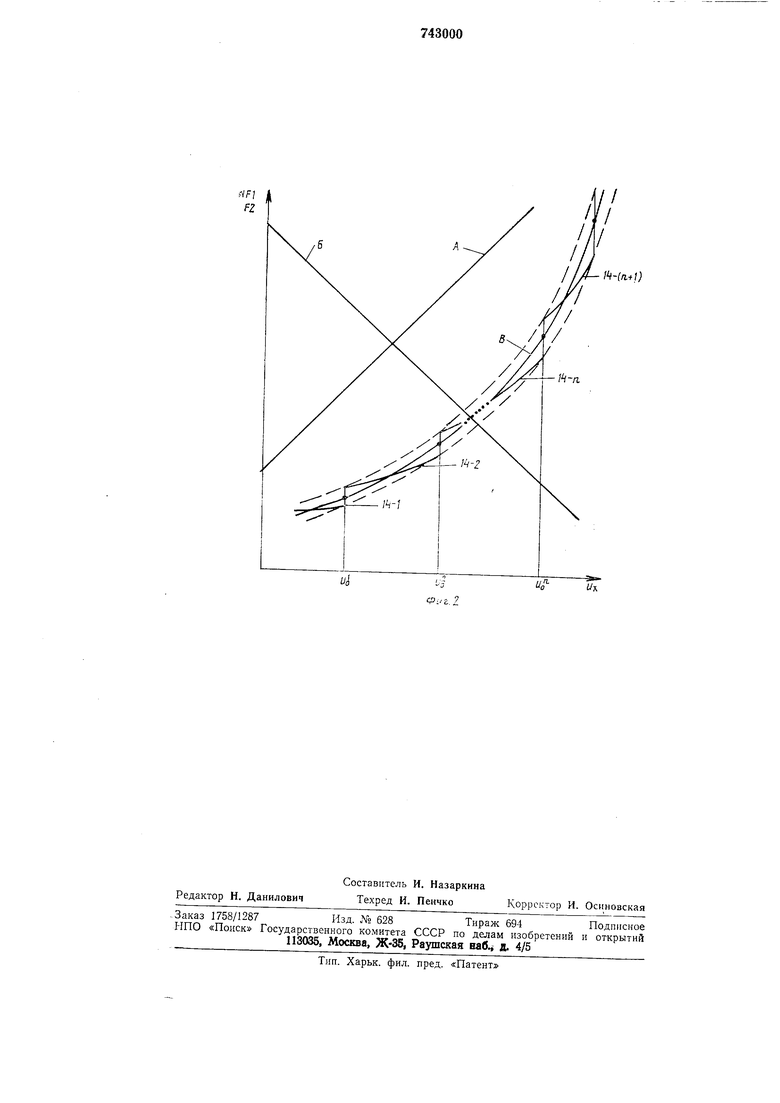
На диаграммах, поясняющих работу преобразователя (фкг, 2) показаны линейио-возрастающая зависимость А от входного сигнала блока 2 преобразования напряжения в частоту, линейно-убьшаюпдая зависимость Б от входного сигнала блока 3 преобразования напряжения в частоту, заданная нелинейная зависимость В, пунктирными кривыми обозначены границы, в которых точность устройства удовлетворяет заданной, цифрами 14-1, 14-2 ... 14-/г, 14(п+1) обозначено семейство кривых вида:
где я, - целые числа.
Семейством этих кривых аппроксимируется заданная нелинейная зависимость. Сигнал с выхода датчика 1 угла поступает на входы блоков 2 и 3 преобразования напряжения в частоту н на БХОДЬГ п компараторов 9, вторые входы которых соединены с источником И пороговых напряжений /о, UQ, . . .t/o. Выход блока 2 преобразования напряжения в частоту соединен с одним из входов элемента И 4, а выход блока 3 преобразования напряжения в частоту соединен с одним из входов элемента И 5. Вторые входы элементов И 4 и 5 еоединены с выходом триггера 10. Выход элемента И 5 соединен с входом счетчика 6. Разрешающие входы п. элементов И 7 соединены соответственно с выходами п компараторов 9. Информационные входы (n-1-l) элементов И 7 соединены с счетчиком 6. Выходы (п+1) элементов И 7 соединены с входами элемента ИЛИ 8, выход которого соединен с одним из входов триггера 10. По шине «Пуск 12 осуществляется запуск устройства. С шины 13 снимается число-импульсный код измеряемой величины.
Преобразователь угла поворота в код работает следующим образом.
В исходном состоянии напряжение Ь,,.с выхода датчика 1 угла подается на входы п компараторов 9 и анализируется последними, причем срабатывают те компараторы, порог срабатывания которых меньн.-е значения сигнала с датчика 1 угла. Если сигнал с датчика 1 угла не превышает величину первого порога, то со всех выходов п компараторов подается разрешение на разрешающие входы п элементов 7. Это i;e напряжение подается постоянно и на блоки 2 и 3 преобразования напряжения в частоту. Блок 2 преобразования напряжения в частоту вырабатывает частоту /-, согласно зависимости А (см. фиг. 2):
f, .,.,
где foi - начальная частота гтри U 0; /С| - коэффициент пропорц ;ог а;1ьности;Ux - напряжение на входе блока
преобразования.
Блок 3 преобразования напряжокмл в частоту вырабатывает частоту /ч- ссг.часио зависимости 15 (см. фиг. 2);
2 - -02-Aov,
где /о2 - начальная частота при И. 0;
/С2 - коэффициент пропорциэнальности;
/УЯ- - напряжение на входе блока
преобразования.
По команде «Запуск по шиче «Пуск 12 триггер 10 меняет свое состояние н открывает элементы И 4 и 5. Через открытый элемент И 5 мп5льсы с выхода блока 3 преобразования напрял-сения в частоту постунают в счетчик 6, в котором записывается число Пь равное:
n, , (.v)
где Т - интервал времени, в течение которого происходит заполнение счетчика 6.
Одновременно через открытый элемент И 4 выходные имиульсы N поступают на выходную шину 13 нреобразователя за интервал времени Г от блока 2 преобразования напряжения в частоту:
f, -Г, ( о;,)Г,.
Учитывая соотношение для числа /TI можно записать:
ЛГ - F.,
Voiy j.
03
Для уменьшения погрешности преобразования используется кусочно-нелинейная -.аппроксимация пелинейкой зависимости, которая осуществляется с помощью п компараторов 9 элементов И 7 и элемента ИЛИ 8. В зависимости от величины сигнала с датчика 1 угла компараторы 9 могут находиться в следующих состояниях: а) если не сработал ни один компаратор, то это значит, что сигнал с датчика 1 угла соответствует первому участку аппроксимации (кривая 14-1, см. фиг. 2) и на разрешающие входы элементов И 7 подано разрешение с выходов компараторов 9; б) если сработали все компараторы 9, то это значит, что сигнал с датчика 1 угла соответствует максимальному значению U, т. е. превышает порог срабатывания /(, (кривая 14(п+1), см. фиг. 2). В этом случае при поступлении импульсов в счетчик 6 срабатывает только (п+1)-ый элемент И 7, так как его вход не подключен к выходам п компараторов. На разрешающие входы п элементов И 7 поданы запрещающие сигналы с выходов п компараторов 9; в) если сигнал с датчика 1 угла превышает значение С/0% но меньше , то с выходов г-компараторов 9 на разрешающие входы j-элемеитов И 7 поступит запрещающий сигнал и срабатывает (г + 1)-ый элемент И 7 (участок аппроксимации). Компараторы 9 постоянно подключены к датчику 1 угла, вне зависимости от времени запуска устройства, и работают в статическом режиме, т. е. всегда готовы к работе и не снижают быстродействия устройства. Допустим, что сигнал с датчика 1 угла соответствует второму участку аппроксимации (кривая 14-2, см. фиг. 2). При этом напряжение с датчика 1 угла превышает пороговое напряжение и„ и первый компаратор 9 выдает запрещающий потенциал на резрешающий вход первого элемента И 7, в этом случае этот элемент И 7 не срабатывает при поступлении импульсов в счетчик 6, в котором будет продолжаться счет до срабатывания второго элемента И 7, так как с выхода второго компаратора 9-2 подается разрешающий потенциал на разрешающий вход второго элемента И 7. При этом будет справедливо следующее соотношение: - F.2 - Л,У. где Пг - число, записанное в счетчике 6, соответствующее второму участку аппроксимации. С выхода второго элемента И 7 через схему ИЛИ 8 триггер 10 возвращается в исходное состояние, закрывая элементы И 4 и 5. На этом преобразование заканчивается и на выходе устройства фиксируется число, пропорциональное измеряемому параметру. Таким образом, с помощью «.-компараторов 9, (п+1) элементов И 7 и элемента ИЛИ 8, изменяя значение числа п в счетчике 6 на отдельных участках заданной нелинейной кривой 16 (см. фиг. 2), можно максимально приближаться к данной нелинейной зависимости, обеспечивая тем самым минимальную погрешность преобразования. Экономический эффект предлагаемого технического решения в повышении точности преобразователя обусловлен переходом к кусочно-нелинейной аппроксимации. Кроме того, появляется возможность реализации более сложных нелинейных зависимостей путем изменения начальных частот блоков преобразования напряжения д частоту, знаков и величин этих блоков н порогов срабатывания компараторов и элементов И. Применение бесконтактных элементов и типовых узлов на дискретных компонентах позволяет дополнительно повысить точность и надел ность преобразователя. Отсутствие переходных процессов в аналоговых элементах также позволяет повысить точность и быстродействие преобразователя. Формула изобретения Преобразователь угла поворота вала в код, содержащий датчик угла, соединенный через блоки преобразования напряжения в частоту с одними входами элементов И, вторые входы которых соединены с выходом триггера, выход одного элемента И соединен с выходной шиной преобразователя, выход другого элемента И подключен к входу счетчика, отличающийся тем, что, с целью повышения точности преобразования, в него введены п комнараторов, (гг+1) элементов И, источник пороговых напряжений и элемент ИЛИ, информационные входы всех элементов И соединены с выходами счетчика, а разрешающие входы п элементов И соединены с выходами компараторов, одни входы которых подключены к выходу датчика угла, другие входы компараторов соединены с соответствуюшими выходами источника пороговых напряжений, выходы элементов И подключены к входам элемента ИЛИ, выход которого соединен с входом триггера. Источники информации, принятые во нимание при экспертизе: 1. Авторское свидетельство СССР 512475, М. КЛ.2 G 06 G 7/24, 1977 г. 2. Авторское свидетельство СССР о 492900, М. КЛ.2 Q 08 С 9/00, 1976 г. (проотип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворотаВАлА B КОд | 1979 |
|
SU830467A1 |
| Цифровая система измерения и обработки | 1986 |
|
SU1352507A2 |
| Устройство для коррекции нелинейности | 1982 |
|
SU1056228A1 |
| Кусочно-нелинейный функциональный преобразователь | 1988 |
|
SU1562940A1 |
| Источник калиброванных напряжений | 1985 |
|
SU1283726A1 |
| Функциональный аналого-цифровой преобразователь | 1985 |
|
SU1260979A1 |
| Источник калиброванных напряжений | 1986 |
|
SU1345179A1 |
| Функциональный преобразователь | 1980 |
|
SU934502A1 |
| Устройство для измерения характеристик случайных погрешностей аналого-цифровых преобразователей | 1987 |
|
SU1443174A2 |
| Устройство для дозирования жидких компонентов | 1986 |
|
SU1383310A1 |