В существующих счетно-решающих приборах для интегрирующих цепей прибора применяют фракционные устройства, являющиеся основным источниКом погрещностей приборов.
Согласно изобретению, предлагается фрикционные устройства заменить -механическим интегратором, предста1вляющим собой многоосную коробку скоростей в сочетании с системой диференциаловУстройство механического интегратора поясняется чертежом.
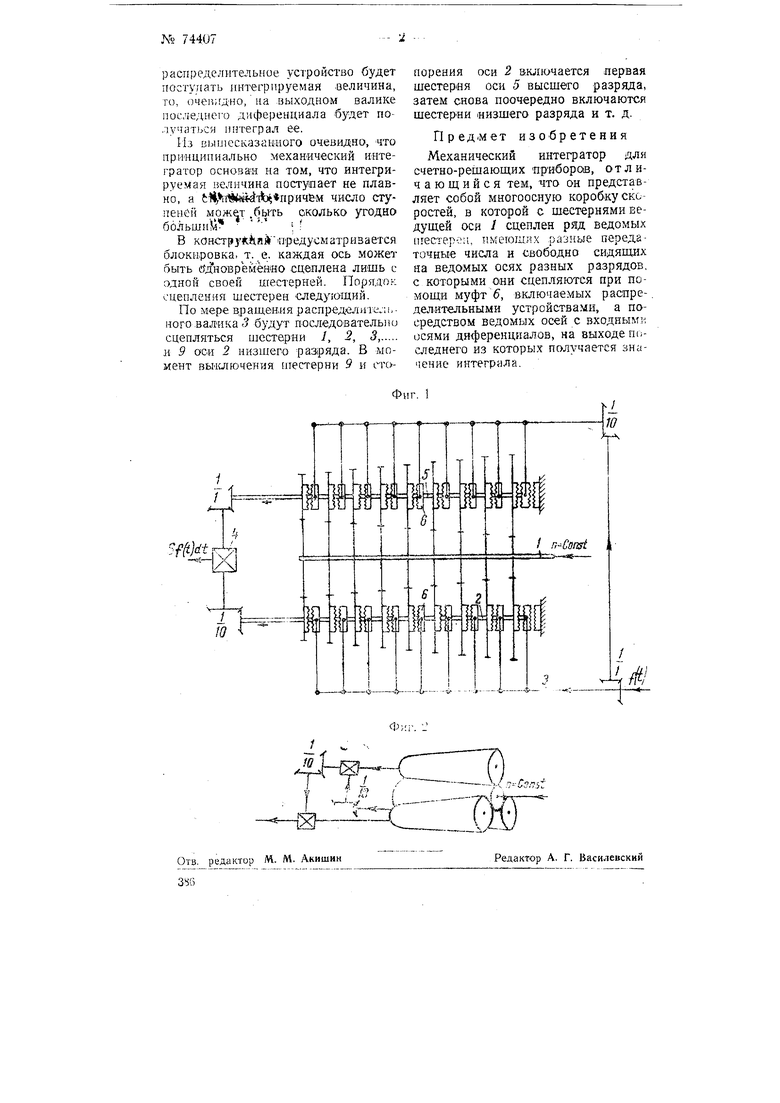
На фиг. 1 изображена кинематическая схема механического интегратора на 100 скоростей; на фиг. 2- принципиальная схема интегратора на 1000 скоростей.
На ведущей оси 1 1юсаж,ены 9 шестерен, находящихся в постоянном зацеплении с одной из девяти шестерен каждой из осей 2 и 5.
Передаточные отнощения каждой пары приняты последовательно: 3 6 У 12 5 118 21 24 27 10 10 Ш То Гб 10 Ю 16 ill
Ось 1 вращается с постоянной угловой скоростью. Шестерни осей и 5 сидят свободно, но .могут сцепляться со своими осями при помощи муфт 6. Включение муфт 6 производится посредством специального Саол. Выпуск .. IS-ij ;,
ГО устройства, снабжен-ного распределительными валика-ми 3.
При последовательном включеяии муфт 6 какой-либо оси угловые скорости ее будут относиться как I 2 i
Ш 10 Ю 10
Вращение осей 2 и 5 складывается на диференциале 4. сосдиненно-м
с осью 2 через передачу РР , а с
К)
д через передачу
При двухосной сх,еме, изображенной на фиг. 1, обеспечивается 100 скоростей.
Если в схеме механического интегратора есть еще одна ось, то добавляется еще один диференциал, связанный с диференциалом 4 через
1
передачу с отнощснием --,:; с третьей осью через передачу с огнош(-ннем V . Прнбавл-ение каждой новой оси с шестернялл увеличивает число скоростей в десять раз.
Так, например, схема, изображенная ira фиг. 2, обеспечивает 1000 скоростей.
1исло разрядов определяется максимально допустимой ошибкой механического Пнтегратора. Если в