(54) ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивное дифференцирующее устройство | 1983 |
|
SU1126974A1 |
| Дифференцирующее устройство | 1983 |
|
SU1101845A1 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2571371C2 |
| Устройство для приема дискретных сигналов | 1983 |
|
SU1107323A1 |
| Дифференцирующее устройство | 1985 |
|
SU1267440A1 |
| Система автоматического управления | 1986 |
|
SU1409971A1 |
| Устройство для определения постоянной времени термодатчиков | 1990 |
|
SU1747952A2 |
| Сглаживающий фильтр | 1981 |
|
SU980065A1 |
| Аналого-цифровой интегратор | 1980 |
|
SU866563A1 |
| Устройство для измерения температуры | 1984 |
|
SU1216670A1 |
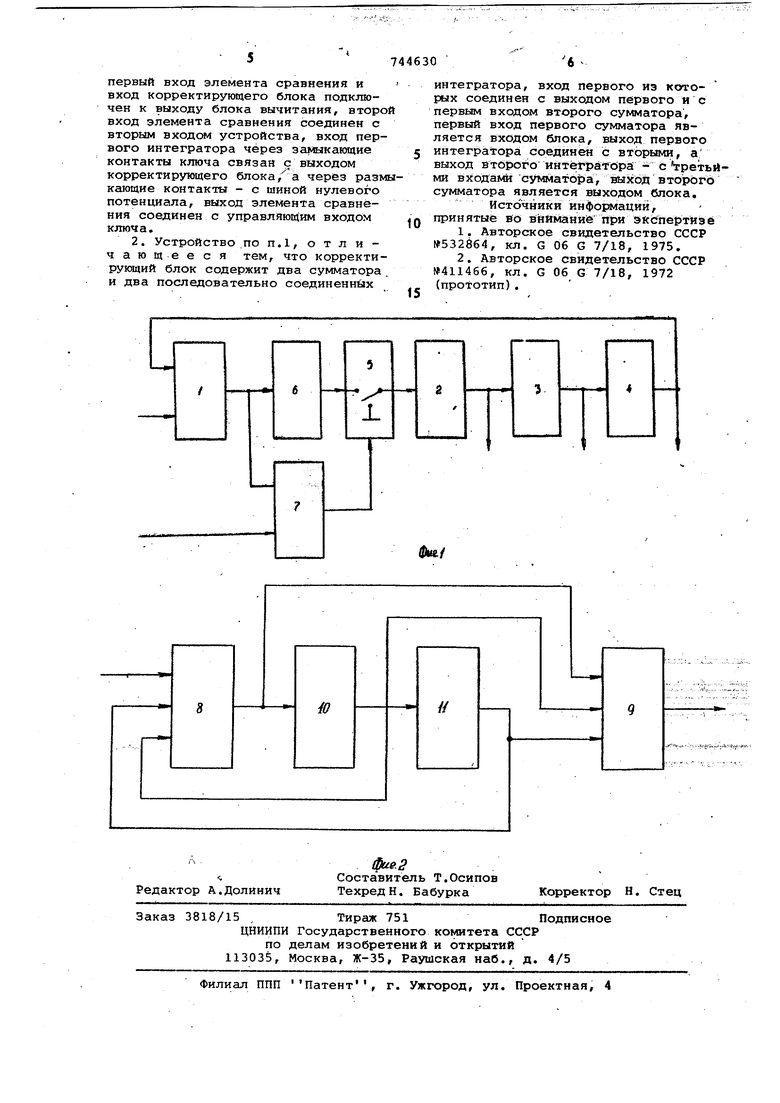
Изобретение относится к оЬласти автоматического управления и айалоговой вычислительной техники и предназначено для нахождения первой и второй производных сигн-ала, поступающего в смеси с шумом, уровень которого известен и, может быть переменцым, Известно устройство, содержащее элемент сравнения, соединенный первым входом со входомустройства, при чем выход элемента сравнения под- ключей ко входу первого нелинейного блока, выход которого связан со входом первого фильтра и со входом первого сумматора, второй вход которого связан с выходом первого интегр атОра, а выход первого сумматора черШз второй интегратор связан со вторым входом элемента сравнеййя, sfорШ нё .линейный блок, выход которого ПОДК.ПК чен к входу второго фильтра,а также второй и третий сумматоры и два майштабирукицих блока С1 . Однако это устройство, включающее в себя управляемые нелинейные блоки,, весьма трудоемко длятехнической реализации. Кроме того, устройство достаточно сложно в наладке,настройке и эксгшуатаций. Наиболее близким по технической сущности к предлагаеМЬму является дифференцирующее устройство, содержащее блок вычитания и цепочку интеграторов , вход первого из которых соединен с выходом блока вычитания, а выход последнего интегратора соединен с одним входом блока вычитания, другой вход которого является входом устройства С5.1. Недостатками устройства являются его низкая помехозащищенность и невысокая точность дифференцирования, если на вход устройства полезный поступает в смеси с шумом, то его производные на выходе могут значительно отличаться от истинных производных полезного сигнала.. Цель изобретения - повышение точности и помехоустойчивости. - Указанная цель достигается тем, что устройство, содержащее блок вычитания, первый вход которого соединен с первым входом устройства, и три последовйтельно соединенных интегратора, выход, последнего из котОftix соединен с вторым входом блока ,вычитания, дополнительно содержит элемент сравнения, корректирующий блок и ключ, при этом первый вход элемента сравнения и вход корректирующего блока подключены к выходу блока вычитания, второй вход элемента сравнения соединен с вторым входом устройства, вход первого интегратора через замыкающие контакты ключа связан с выходом корректирующего блока, а через размыкающие контакты - с шиной нулевого потенциала, выход элемента сраёнения сое динен с управляющим входом ключа , а также тем, что корректирующий блок содержит два сумматора и два последовательно соединенных интегра тора, вход первого из которых сое-. динен с выходом-первого и с первым входом второго сумматоров, первый вход первого сумматора является входом блока, выход первого интегра тора соединен со вторыми, - а выход второго интегратора - с третьими входами сумматоров, выход второго сумматора является выходом блока. На фиг.1 представлена блок-схема дифференцирующего устройства; на фиг.2 - блок-схема корректирукицего блока. Устройство содержит блок 1 вычитания, интеграторы 2-4, ключ 5, кор ректирующий блок б, элемент 7 сравнения. Корректирующий блок б-включает сумматоры 8, 9 и интеграторы ,10, 11 Устройство работает следующим образом. На вход блока 1 вычитания поступ ет смесь полезного сигнала с шумом. На вход элемента 7 сравнения, т.е. на второй вход устройства, подается напряжение ue, пропорциональное величине среднеквадратического значения шума. Если абсолютная величина .рассогласования (невязки)на выходе блока 1 оказывается больше Off, элемент 7 замыкает ключ 5, и сигнал ра согласования через корректирующий блок б поступает на вход интегратор 2. Поскольку корректирующий блок 6 обеспечивает устойчивость замкнутой системы, рассогласование уменьшаетс Как только абсолютная величина р согласования становится меньше ив , вход интегратора 2 подключается к шине нулевого потенциала. При наличии шума во входном сигн ле не имеет смысла отслеживать этот сигнал с точностью, превышающей дис персию шума/ так как в противном.слу чае этот шум будет дифференцировать и может полностью подавить знач ния производных полезного сигнала. Поэтому отслеживание ведется так, чтобы небаланс на выходе сумматора не превышал величины шуМа 30 входнбм сигнале, т.е. слгнал на выходе сле|дящей системы (выход интегратора 4) отличается от входного сигнала не более, чем на величину дисперсии шума. При этом производные входного сигнала на выходах интеграторов 2 и 3 устойчивы и не содержат значительной шумовой составляющей. Это объясняется тем, что схема начинает отрабатывать рассогласование только тогда, когда оно превышает величину шума во входном сигнале, а, следовательно, эти рассогласование действительноимеет место относительно полезного сигнала, оно не является следствием шума. Чем больше величина шума во .входном сигнале, тем более приближенно получаются первая и вторая производные полезного сигнала. Однако при. любом значении шума во входном сигнале получаемое решение устойчиво, более того, при стремлении к нулю дисперсии шума во входном сигнале получаемые значения производных стремятся к точным значениям производных полезного сигнала. При отсутствии шумов ключ 5 находится все время в замкнутом состоянии, и передаточная функция устройства от входа к выходу интеграторов 2-4 имеет следующий вид (с точностью до высокочастотного сглаживающего оператора, расположенного в знаменателе) . ) Tj. рГ Wj(p) т . р, W, (р) S г, где р - оператор Лапласа; Tj,T -постоянные времени интеграторов . Таким образом, дифференцирующее устройство, принцип действия которого основан на динамическом методе моделирования некорректных задач, позволяет получить приближенные устойчивые значения первой и второй производных полезного сигнала, согласованные с погрешностью входных данных. Положительный эффект от использования устройства заключается в возможности построения простыми техническими средствами дифференциаторов с оптимальными точностными характеристиками. Формула изобретения 1. Дифференцирующее устройство, содержащее блок вычитания, первый вход которого соединен с первым входом устройства , и три последовательно соединенных интегратора, выход последнего из которых соединен с вторым входом блока вычитания, отличающёес я тем, что, с целью повышения точности и помехоустойчивости, устрой гво дополнительо содержит элемент сравнения, коректирующий блок и ключ, при этом
первый вход элемента сравнения и вход корректирующего блока подключен к выходу блока вычитания, второ вход элемента сравнения соединен с вторым входом устройства, вход первого интегратора через замыкающие контакты ключа связан с выходом корректирующего блока, через размкающие контакты - с шиной нулевого потенциала, выход элемента сравнения соединен с управляющим входом ключа.
40
интегратора, вход первого из которых соединен с выходом первого и с первым входом второго сумматора, первый вход первого сумматора является входом блока, выход первого интегратора соединен с вторыми, а выход втброго интегратора - с третьими входами сумматора, наход второгб сумматора является выходом блока.
Источники информации, принятые во внимание при экспертизе
0
5
//
