114
Изобретение относится к системам автоматического управления и может быть использовано при управлении |объектами с запаздыванием с перемен- |ными параметрами и неконтролируемыми |возму1цениями в химической, .нефтехими- |ческоЙ5 металлургической и других |отра.слях промьнапенности.
Цель изобретения - повышение точности системы в условиях запаздывания в объекте.
На фиГе 1 представлена структурная схема системы; на фиг. 2 - структур
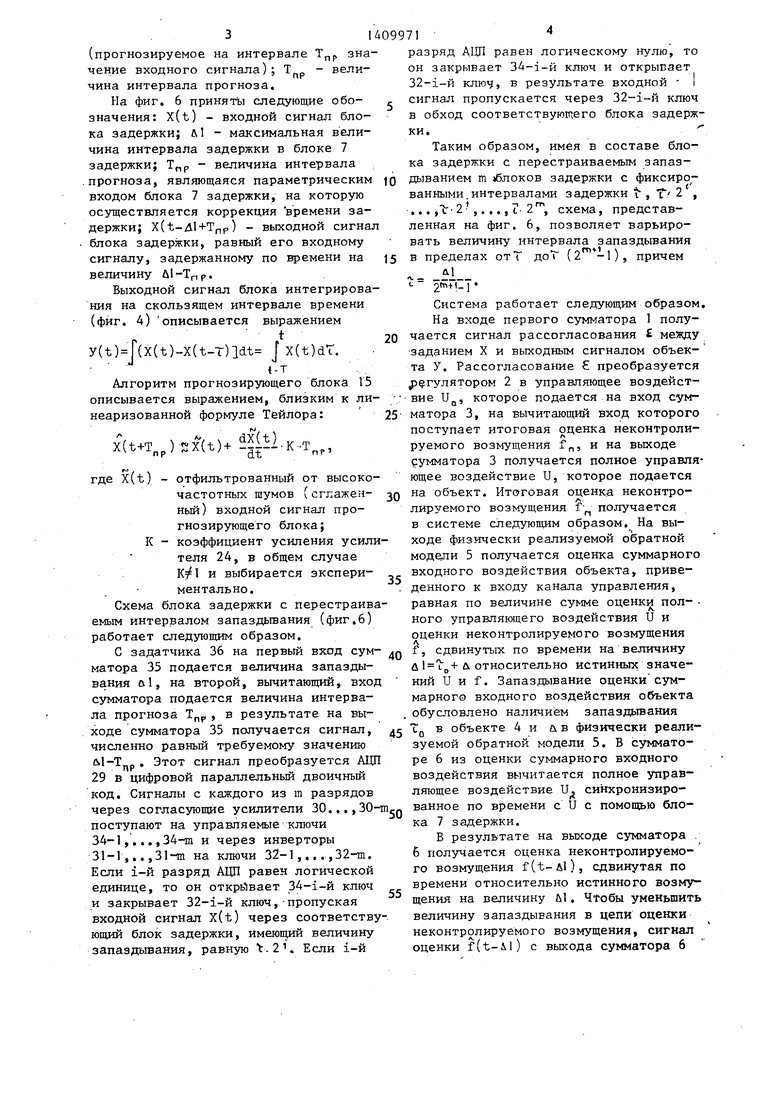
тролируемое возмущение; UA - выходной сигнал регулятора; U - полное уп- равляющее воздействие; f(t-&l) - оценка неконтролируемого возмущения, лучаемая на выходе сумматора 6; f - итоговая оценка неконтролируемого возмущения, участвующая в формировании управляющего воздействия; - сигнал рассогласования между сигналом задания и выходным сигналом объекта. На фиг. 2 приняты следующие обозначения: f - неконтролируемое возму- 1 ение; У - выходной сигнал объекта;
ная схема компенсации неконтрол11руемых .f - оценка неконтролируемого возмуще25
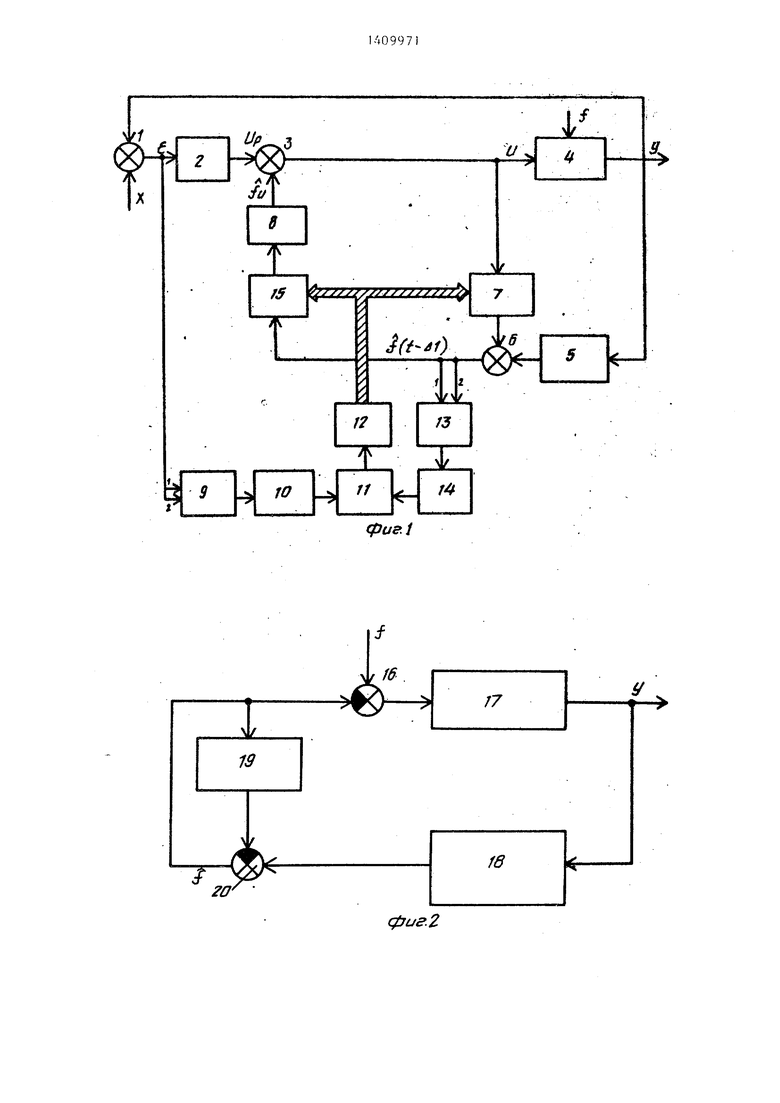
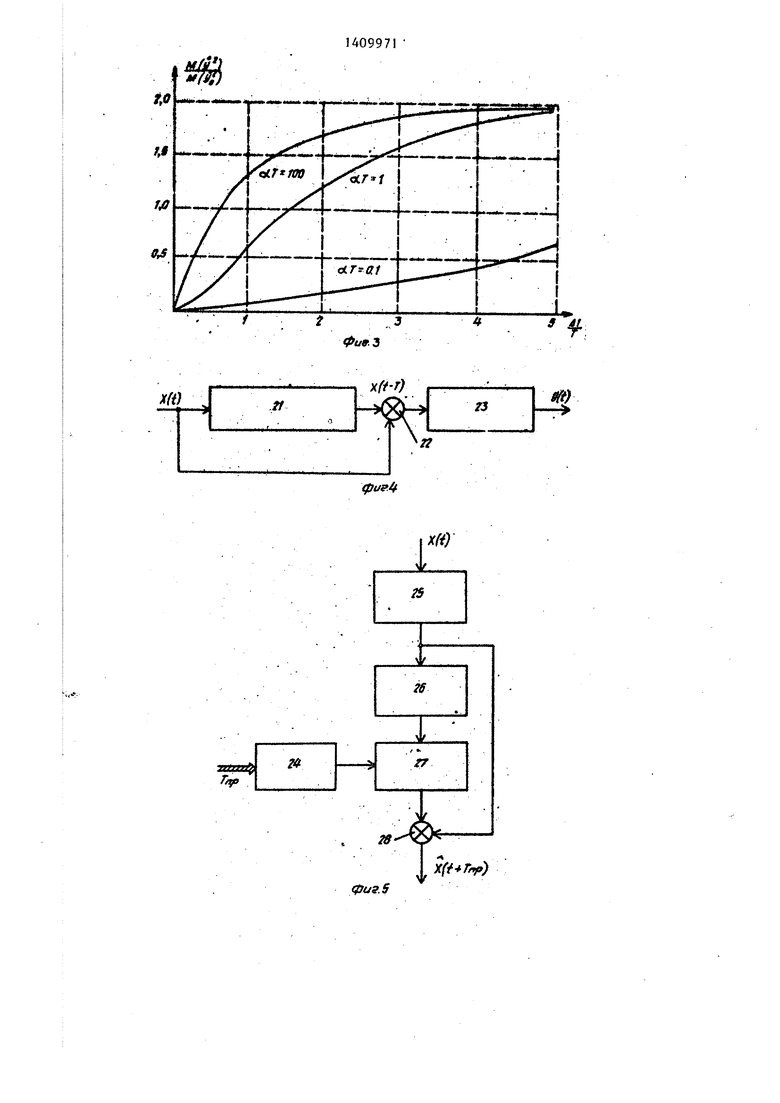
возмущений; на фиг. 3 - зависимость эффективности компенсации неконтролируемых возмущений- от величины отношения -запаздывания в системе и постоянной времени объекта; на фиг, 4 - . структурная схема блоков интегрирования на скользящем интервале време- ни| -на фиг. 5 - структурная схема 1прогнозир: пощего блока; на фиг, 6 - iструктурная схема блока задержки. I Система (фиг, I) содержит первый сум1чатор 1, регулятор 2, второй сумматор 3, объект 4 управления} обратную модель 5 объекта управления, третий сумматор б, блок 7 задержки с пе- 30 pecTpanBaeivH iM запаздыванием, коррек- тируюЕщй блок 8, первый блок 9 умножения., первый интегратор 10, блок 11 деления, блок 12 самонастройки, второй блок 13 умноженияJ второй интегра- fop 14 и прогнозирующий .блок 15.
На фиг. 2 обозначены сумматор 16, объект 17 управления, обратная модель 18 объекта, блок 19 задержки и сумматор 20.
Блок интегрирования на скользящем интервале времени (фиг, 4) включает блок 21 задержки, сумматор 22 и интегратор 23,
Прогнозирующий блок (фиг, 5) образуют усилитель 24J блок 25 фильтрации, .дифференцирующий блок 26, блок 27 умножения и сумматор 28,
Блок задержки (фиг, 6) содержит аналого-цифровой преобразователь (АЦП) 29, усилители 30-;-1,,.,.,ЗО-га, инверторы 3 -15,, . ., 31 -ю э управляемые ключи 32 1,,. . J 32-m, блоки 33- „,, , 33-та+ задержки, управляемые ключи
35
ния.
На фиг. 3 представлена зависимость эффективности компенсации неконтролируемых возмущений, оцениваемая как от- 20 ношение , от величины отношения запаздывания в системе к постоянной времени объекта для различного характера частотного спектра возмущения f:
,1/Т - низкочастотное возмущение;
С11 100/Т - высокочастотное возмущение;
сл /т спектр возмущения находится в полосе пропускания объекта. .
На фиг. 3 приняты следующие обозначения: Т - постоянная времени объекта; сЯ - величина, обратная времени спадания автокорреляционной функции неконтролируемого возмущения, ,
) ,
-ri-gj - отнощение дисперсии выходного сигнала объекта в схеме с компен- 40 сацией неконтролируемого возмущения и свободного объекта; л1 - общая величина запаздьшания в схеме компенсации неконтролируемого возмущения, определяемая выражением &l(i+ rgj где й- достаточно ;малое запаздьшание, определяемое условиями .физической реализуемости обратной модели объекта; , LP - запаздьшание в объекте.
На фиг. 4 приняты следующие обозначения: X(t) - входной сигнал блока задержки; X(t-T) - выходной сигнал блока задержки; y(t) - выходной сигнал блока интегрирования на скользящем интервале времени.
45
50
34, 34-т5 cyMviaTop 35 и задатчик 36,
На фиг„ 1 приняты следующие обозначения; X сигнал заданияI У - выходной сигнал объекта; f некон™
0
тролируемое возмущение; UA - выходной сигнал регулятора; U - полное уп- равляющее воздействие; f(t-&l) - оценка неконтролируемого возмущения, лучаемая на выходе сумматора 6; f - итоговая оценка неконтролируемого возмущения, участвующая в формировании управляющего воздействия; - сигнал рассогласования между сигналом задания и выходным сигналом объекта. На фиг. 2 приняты следующие обозначения: f - неконтролируемое возму- 1 ение; У - выходной сигнал объекта;
.f - оценка неконтролируемого возмуще25
30
5
ния.
На фиг. 3 представлена зависимость эффективности компенсации неконтролируемых возмущений, оцениваемая как от- 20 ношение , от величины отношения запаздывания в системе к постоянной времени объекта для различного характера частотного спектра возмущения f:
,1/Т - низкочастотное возмущение;
С11 100/Т - высокочастотное возмущение;
сл /т спектр возмущения находится в полосе пропускания объекта. .
На фиг. 3 приняты следующие обозначения: Т - постоянная времени объекта; сЯ - величина, обратная времени спадания автокорреляционной функции неконтролируемого возмущения, ,
) ,
-ri-gj - отнощение дисперсии выходного сигнала объекта в схеме с компен- 0 сацией неконтролируемого возмущения и свободного объекта; л1 - общая величина запаздьшания в схеме компенсации неконтролируемого возмущения, определяемая выражением &l(i+ rgj где й- достаточно ;малое запаздьшание, определяемое условиями .физической реализуемости обратной модели объекта; , LP - запаздьшание в объекте.
На фиг. 4 приняты следующие обозначения: X(t) - входной сигнал блока задержки; X(t-T) - выходной сигнал блока задержки; y(t) - выходной сигнал блока интегрирования на скользящем интервале времени.
На фиг, 5 приняты следующие обозначения: X(t) - входной сигнал прогнозирующего блока; X() - выходной сигнал прогнозирующего блока
5
0
5
(прогнозируемое на интервале значение входного сигнала); Т „ - величина интервала прогноза.
На фиг. 6 принять) следующие обозначения: X(t) - входной сигнал блока задержки; л1 - максимальная величина интервала задержки в блоке 7 задержки; Tf,p - величина интервала прогноза, являющаяся параметрическим входом блока 7 задержки, на которую осуществляется коррекция времени задержки; X(t-Al+Tp,p) - выходной сигнал блока задержки, равный его входному сигналу, задержанному по времени на величину Д1 -Тр р.
Выходной сигнал блока интегрирования на скользящем интервале времени (фиг. 4) описывается выражением
ГР
y(t)j(X(t)-X(t-T)ldt J X(t)dT.
i-r
Алгоритм прогнозирующего блока 15 описывается выражением, близким к ли- неаризованной формуле Тейлора:
X(t+T
пр
)«X(t)+ .Т ; AVt,;- л
/
где X(t) - отфильтрованный от высокочастотных шумов (сглажен- ный) входной сигнал прогнозирующего блока; К - коэффициент усиления усилителя 24, в общем случае Кт 1 и выбирается экспериментально.
Схема блока задержки с перестраиваемым интервалом запаздьгаания (фиг.6) работает следующим образом.
С задатчика 36 на первый вх0д сумматора 35 подается величина запаздывания al, на второй, вычитающий, вход сумматора подается величина интерва
ла прогноза , в результате на выходе сумматора 35 получается сигнал, численно равный требуемому значению . Этот сигнал преобразуется АЦ 29 в цифровой параллельный двоичный код. Сигналы с каждого из m разрядов через согласующие усилители 30...,30 поступают на управляемые :ключи 34-1,..., и через инверторы 31-1 ,.. ,31-1й на ключи 32-1,...,32-т. Если i-й разряд АЦП равен логической единице, то он открывает 34-1-й ключ и закрывает 32-1-й ключ,пропуская входной сигнал X(t) через соответствющий блок задержки, имеющий величину запаздывания, равную V. 2. Если i-й
0
5
-; 5
0
0
5
0
LQ Q
5
разряд АЦП равен логическому нулю, то он закрывает 34-1-й ключ и открывает 32-1-й ключ в результате входной I сигнал пропускается через 32-1-й ключ в обход соответствующего блока задержки.. Таким образом, имея в составе блока задержки с перестраиваемым запаздыванием m блоков задержки с фиксированными, интервалами задержки t , Т 2 , ... ,: 2 ,. .., Г-2, схема, представленная на фиг, 6, позволяет варьировать величину интервала запаздывания в пределах от Т доТ (), причем
.- fl.
-
Система работает следующим образом.
На входе первого сумматора 1 получается сигнал рассогласования между заданием X и выходным сигналом объекта У. Рассогласование преобразуется )$гулятором 2 в управляющее воздейст- вие Ujj, которое подается на вход сумматора 3, на вычитающий вход которого поступает итоговая оценка неконтролируемого возмущения Г„, и на выходе сумматора 3 получается полное управляющее воздействие U, которое подается на объект. Итоговая оценка неконтролируемого возмущения f- получается в системе следующим образом. На выходе физически реализуемой обратной 5 получается оценка суммарного входного воздействия объекта, приведенного к входу канала управления, равная по величине сумме оценки пол-
Ач
ного управляю цего воздействия U и оценки неконтролируемого возмущения f, сдвинутьтх по времени на величину Л I L O+ f относительно истинных значений и и f. Запаздывание оценки суммарного входного воздействия объекта обусловлено наличием запаздьшания TQ в объекте 4 и а в физически реализуемой обратной модели 5. В сумматоре 6 из оценки суммарного входного воздействия вычитается полное управляющее воздействие U. синхронизированное по времени с U с помощью блока 7 задержки.
В результате на выходе сумматора . 6 получается оценка неконтролируемого возмущения f(t-Al), сдвинутая по времени относительно истинного возмущения на величину ul. Чтобы уменьшить величину запаздывания в цепи оценки неконтролируемого возмущения, сигнал
оценки ir(t-A.l) с выхода сумматора 6
подается на вход прог юзиругоп ;его блока 15. Величина интервала прогноза, обеспечивающая минимум отношения сренеквадратичного на скользящем интервале времени значения сигнала рассогласования и оценки неконтролируемого возмущения ), получается на выходе блока 12 самонастройки и передается на параметрический вход прогнозирующего блока 15, а также на параметрический вход блока 7 задержки, в котором осуществляется коррекция величины интервала задержки по формуле 7: +д-Т„р, где „ - время запаздывания в объекте; А- интервал задержки в блоке физически реализуемой обратной модели 5; Т оптимальное значение интервала прогго значения интервала прогноза в системе достигается более высокая эффективность компенсации неконтролируемых возмущений.
Формула изобретения
Система автоматического управления, содержащая первый сумматор, первый вход которого подключен к входу задания системы, а выход - к входу регулятора, подключенного выходом к первому входу второго сумматора, выход которого соединен с информационным входом блока задержки с перестраиваемым запаздьшанием и с входом объекта управления, подключенного выхо-. дом к второму входу первого сумматора и к входу обратной модели объекта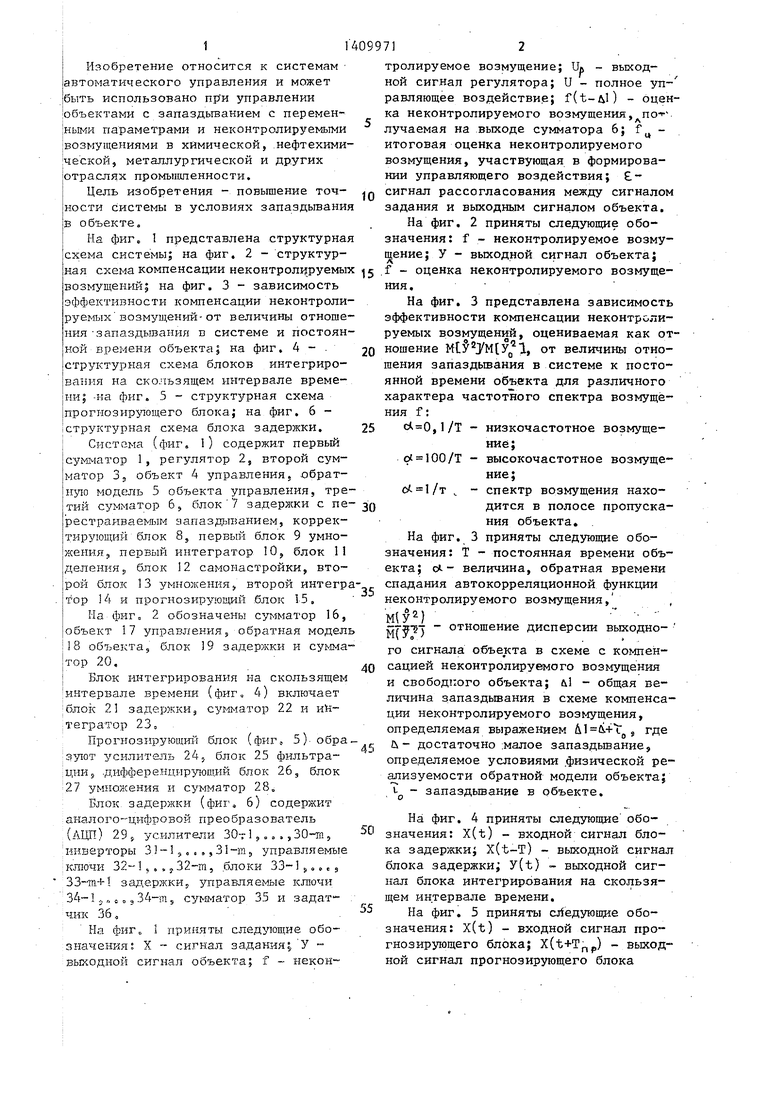
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Система автоматического управления | 1982 |
|
SU1113781A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |

Изобретение относится к системам автоматического управления и может найти применение при управлении объектами с запаздыванием, с переменными параметрами и неконтролируемыми возмущениями в химической, нефтехими ческой, металлургической и других отраслях промьшшенности. Цель изобретения - повышение точности систеьал в условиях запаздьгеания в объекте упг равления, которая достигается введением в цепь компенсации неконтролируемого возмуш;ения прогнозирующего блока и контура самонастройки параметров прогнозирующего блока, С целью синхронизации сигналов в цепи компенсации неконтролируемых, возмущений в системе реализована коррекция интер вала задержки блока задержки ; В систе- ме повышается эффективность компенсации неконтролируемых возмущений при- Q менительно к объектам с запаздыванн ем. 6 ил. . S (Л
ноза. Полученная на выходе прогнози- 20 управления, выход которой соединен с
рующего блока 15 оценки неконтролируемого возмущения f(t-u-), сдвинутая по времени относительно f на величину д,, через корректирующий блок 8 подается на вычитающий вход сумматора 3 в виде итоговой оценки
контролируемого возмущений f, , На вход блока 12. самонастройки поступает сигнал с блока 11 деления, численно равный отношению среднеквадратичных значений сигнала рассогласования и оценки неконтролируемого возмущения f(t-uj). Причем на вход блока 11 деления поступает сигнал с интегратора 10, вход которого подключен к выходу блока 9 умножения, а на другой вход блока деления подается сигнал с выхода интегратора 14j на вход которого поступает сигнал с выхода блока 13 умножения. На входы блока 9 умножения поступает с выхода сумматора 1 сигнал рассогласования ., а на входы блока 13 умножения - сигнал r(t-&l) с выхода сумматора 6.
Таким образом, путем организации прогноза оценки неконтролируемого воз мущения в системе, оптимизации параметров прогнозирующего блока 15,
коррекции величины запаздывания в блоке 7 задержки на величину оптимально
первым входом третьего сумматора, второй вход которого подключен к выходу блока задержки с перестраиваемым запаздьшанием, второй вход второго
сумматора соединен с выходом корректирующего блока, отличающа- я с я тем, что, с целью повышения точности системы в условиях запаздывания в объекте управления, в нее введены первый и второй блоки умножения, первьй и второй интеграторы, блок деения, прогнозирующий блок и блок самонастройки, выход которого соединен с входом управления запаздыванием блока задержки с перестраиваемым запаздыванием и с управляющим входом прогнозирующего блока, подключенного ВЫХОДОМ к входу корректирующего блока, а информационным входом - к выходу
третьего сумматора и к первому и второму входам второго блока умножения, выход которого через второй интегратор соединен с входом делителя блока деления, подключенного выходом к входу блока самонастройки, а входом делимого - к вь1ходу первого интегратора, вход которого соединен с выходом первого блока умножения, первый и вто
рой входы которого подключены к вы- t-Q ходу первого сумматора.
f f6
Т
го
77
fe
фиг.2
Х(4Г)
/77
i
(fi
LO
Фиг.б
// /-// 7/)
| Система автоматического управления | 1982 |
|
SU1113780A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система автоматического управления | 1982 |
|
SU1113781A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
