1
4Эписываемый электродвигатель предназначен для использования в регулируемых электроприводах вертикального перемещения исполнительных органов рабочих механизмов, в частности дозирующих устройств химического производства.
Известны линейные электромагнитные двигатели, содержащие одну или две обмотки, цилиндрический магнитопровод, полюса и ферромагнитный якорь, движущийся в направляющем немагнитном цилиндре 1.
Наиболее близким по техническому решению к описываемому изобретению является двигатель, содержащий обмотку, магнитопровод, образованный цилиндрическим ярмом, верхним и нижним кольцевыми полюсами, и ферромагнитный якорь, размещенный в направляющейнемагнитной втулке 2.
Однако якорь как первого, так и второго двигателя не имеет устойчивого положения в промежуточных точках хода, кроме двух крайних положений . Это свойство известных электромагнитных двигателей обусловлено типичной структурой их магнитной цепи, для которой характерна силь2
ая зависимость магнитной проводимости от положения якоря. Вследствие этого устойчивое равновесие между силой тяги двигателя и силой сопротивления рабочего органа не может быть достигнуто в промежуточных точках хода. Получить устойчивые положения якоря в пролюжуточных точках хода путем регулирования тока в об10мотке двигателя (или напряжения) не удается.
Цель изобретения состоит в том, что№1 получить устойчивое положение якоря в любой точке рабочего хода
15 1 обеспечить регулирование скорости его движения.
Эта цель достигается тем, что между верхним полюсом магнитопровода и немагнитной направляющей втул20кой установлена немагнитная цилиндрическая вставка, а нижний полюс снабжен ферромагнитным цилиндром, охватывгиощим направляющую втулку.
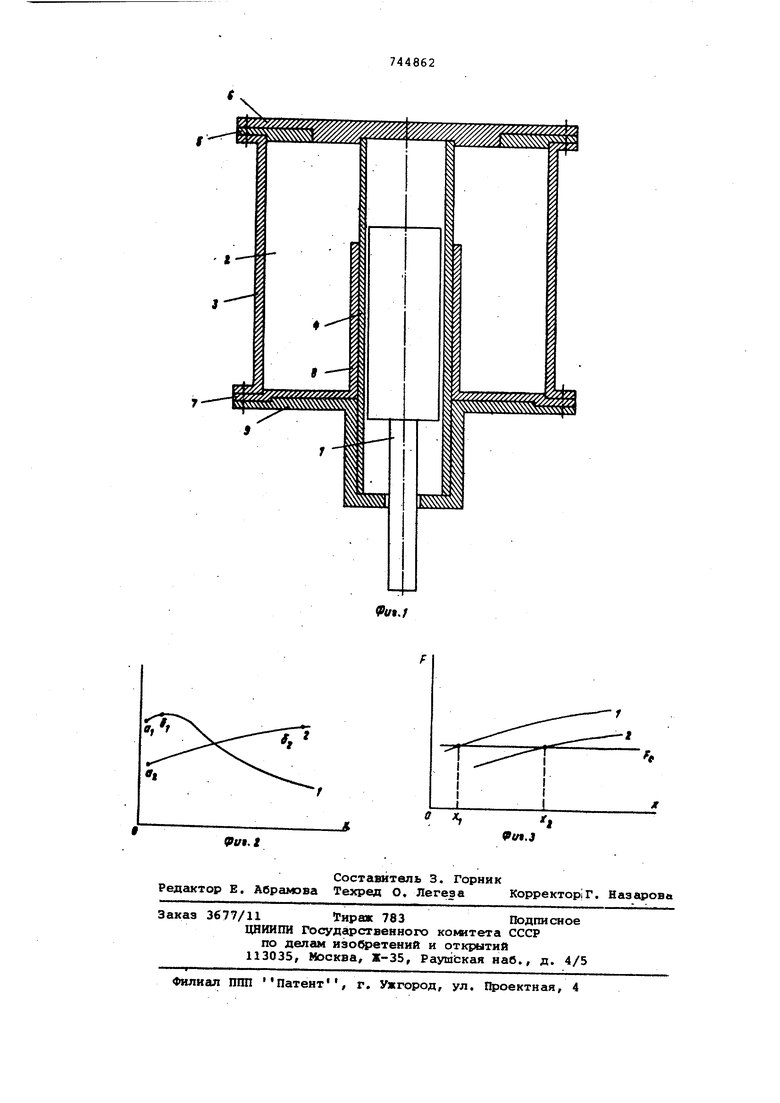
На фиг. Г изображен продольный
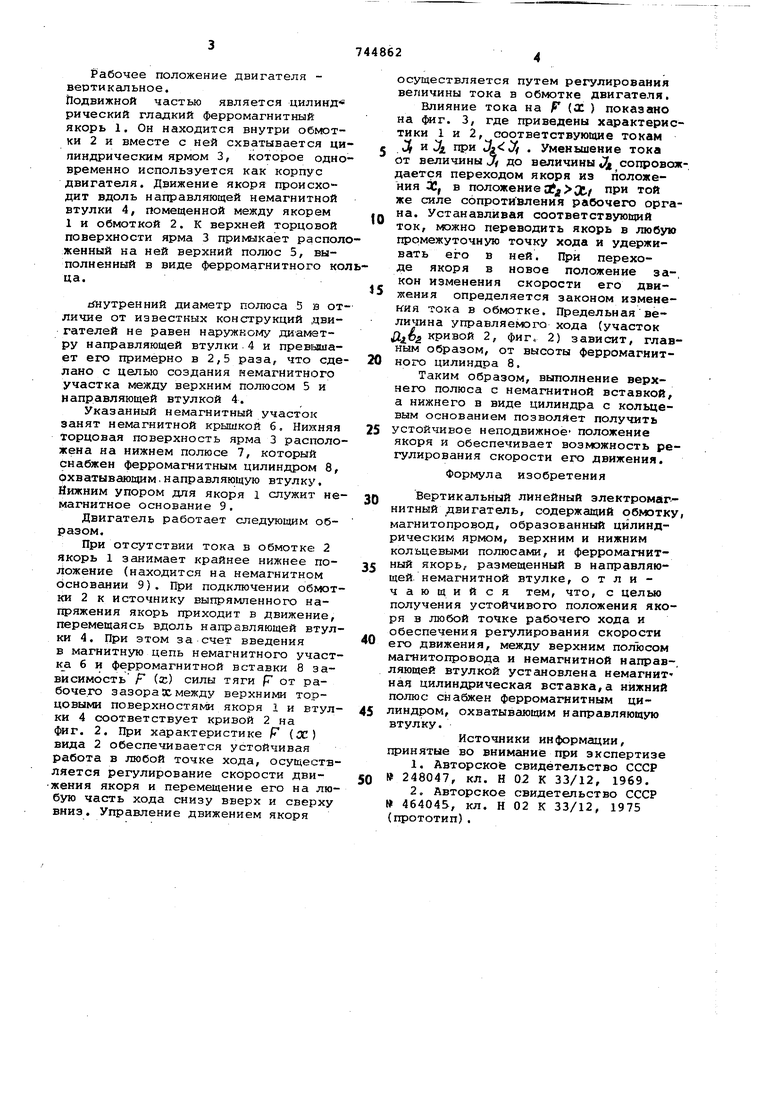
25 разрез двигателя на фиг. 2 - зависимость силы тяги Р от рабочего зазора X t на фиг. 3 - зависимость силы тяги от рабочего зазора при различных величинах тока J.
30 Рабочее положение двигателя вертикальное. Подвижной частью является цилинд рический гладкий ферромагнитный якорь 1. Он находится внутри обмотки 2 и вместе с ней схватывается ци пиндрическим ярмом 3, которое одно временно используется как корпус двигателя. Движение якоря происходит вдоль направляющей немагнитной втулки 4, помещенной между якорем 1 и обмоткой 2. К верхней торцовой поверхности ярма 3 примыкает распол женный ка ней верхний полюс 5, выполненный в виде ферромагнитного ко ца. внутренний диаметр полюса 5 в от личие от известных конструкций двигателей не равен наружког гу ди-аМ1ЭТру направляющей втулки 4 и npeBiauiaет его примерно в 2,5 раза, что сде лано с целью создания немагнитного участка между верхним полюсом 5 и Направляющей втулкой 4. Указанный немагнитный участок занят немагнитной крышкой б. Нижняя торцовая поверхность ярма 3 располо жена на нижнем полюсе 7, который снабжен ферромагнитным цилиндром 8, рхватываю1цим. направляющую втулку, Нижним упором для якоря 1 служит не магнитное основание 9. Двигатель работает следующим образом. При отсутствии тока в обмотке 2 якорь 1 занимает крайнее нижнее положение (находится на немагнитном основании 9). При подключении обмот ки 2 к источнику выпрямленного напряжения якорь приходит в движение, перемещаясь вдоль направляющей втул ки 4. При этом за счет введения в магнитную цепь немагнитного участ ка 6 и ферромагнитной вставки 8 зависимость Р (ж) силы тяги Р от рабочего зазора ж между верхними торцовыми поверхностянда якоря 1 и втул ки 4 соответствует кривой 2 на фиг. 2. При характеристике Р (ОС) вида 2 обеспечивается устойчивая работа в любой точке хода, осуществ ляется регулирование скорости движения якоря и перемещение его на любую часть хода снизу вверх и сверху вниз. Управление движением якоря осуществляется путем регулирования величины тока в обмотке двигателя. Влияние тока на f (X. } показано на фкт. 3, где приведены характеристики 1 и 2, соответствующие токам oj и Ci при . Уменьшение тока от величины J до величины с) сопровождается переходом якоря из положения 31, в положение Р о же силе сопротивления рабочего органа. Устанавливая соответствующий ток, можно переводить якорь в любую промежуточную точку хода и удерживать его в ней. При переходе якоря в новое положение за-, кон изменения скорости его движения определяется законом изменекия тока в обкютке. Предельная величина управляемого хода (участок кривой 2, фиг. 2) зависит, главным образом, от высоты ферромагнитного цилиндра 8. Таким образом, выполнение верхнего полюса с немагнитной вставкой, а нижнего в виде цилиндра с кольцевым основанием позволяет получить устойчивое неподвижное- положение якоря и обеспечивает возможность регулирования скорости его движения. Формула изобретения Вертикальный линейный электромагнитный двигатель, содержащий обмотку, магнитопровод, образованный цилиндрическим ярмом, верхним и нижним кольцевыми полюсами, и ферромагнитный якорь, размещенный в направляющей, немагнитной втулке, отличающийся тем, что, с целью получения устойчивого положения якоря в любой точке рабочего хода и обеспечения регулирования скорости его движения, между верхним полюсом магнитопровода и немагнитной направ-, ляющей втулкой установлена немагнит ная цилиндрическая вставка,а нижний полюс снабжен ферромагнитным цилиндром, охватывающим направляющую втулку. Источники информации, принятые во внимание при зкспертизе 1.Авторское свидетельство СССР 248047, кл. Н 02 К 33/12, 1969. 2.Авторское свидетельство СССР № 46404S, кл. Н 02 К 33/12, 1975 (прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2705205C1 |
| Вертикальный линейный электродвигатель | 1978 |
|
SU743132A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2694811C1 |
| Вертикальный линейный электромагнитный двигатель | 1978 |
|
SU888291A2 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2159984C1 |
| Ударный узел электромагнитного перфоратора | 1990 |
|
SU1700226A1 |
| МАГНИТНЫЙ ПРИВОД С ХОДОВЫМ ЯКОРЕМ В ВИДЕ ПОСТОЯННОГО МАГНИТА | 1990 |
|
RU2083013C1 |
| ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2370874C1 |
| ДВИГАТЕЛЬ С ШАГОВЫМ ВРАЩЕНИЕМ ЯКОРЯ | 1990 |
|
RU2046522C1 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2185018C2 |