(54) ПРИВОД ПОДВИЖНОГО ЗЕРКАЛА ИНТЕРФЕРОМЕТРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Прецезионное отклоняющее устройство | 1982 |
|
SU1048447A1 |
| Система слежения гелиоустановки | 1983 |
|
SU1135973A1 |
| Струйно-фотокомпенсационный полупропорциональный регулятор | 2022 |
|
RU2788577C1 |
| СТРУЙНО-ФОТОКОМПЕНСАЦИОННЫЙ ПОЛУПОСТОЯННО РАБОТАЮЩИЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ (ПИ) РЕГУЛЯТОР | 2022 |
|
RU2788575C1 |
| Струйно-фотокомпенсационный полупостоянно работающий пропорционально-интегрально-дифференциальный (ПИД) регулятор | 2022 |
|
RU2788576C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ШИРОКОДИАПАЗОННЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНЫХ СМЕЩЕНИЙ | 1993 |
|
RU2069309C1 |
| Устройство для считывания графической информации | 1984 |
|
SU1241178A1 |
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2142116C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МОДУЛЯТОР РАЗНОСТИ ДЛИН ПЛЕЧ ИНТЕРФЕРОМЕТРА | 2003 |
|
RU2261464C1 |
| ПРЕЦИЗИОННОЕ ОТКЛОНЯЮЩЕЕ УСТРОЙСТВО | 1972 |
|
SU324600A1 |
Изобретение относится к следящим системам с обратной связью, и может быть применено для плоско-параллельного перемещения и точного позицио- j нирования подвижного зеркала интерферометра.
Позиционирование деталей с точностью выше 0,1 мкм, которое необходимою для обеспечения работоспособности таких приборов, как лазеры, интерферометры Фабри-Перо, двухлучевые интерферометры, очень трудно обеспечить пассивными средствами за счет ста- .5 бильных геометрических размеров, особенно в условиях вибраций. Эта задача особенно усложняется, если точное позиционирование необходимо осуществлять на больше расстоянии 20 при каждом шаге перемещения подвижной детали.
Такая задача возникает в Фурьеспектрометрии, когда подвижный отражатель должен перемещаться строго 25 плоско-параллельно с минимальным , шагомМ2.к,и позиционироваться с точностью Л/2ОК.,
где Л - наименьшая длина волны в исследуемом излучении; ЗО
К- коэффициент, зависящий от конструкции прибора, обычно К - 2,4.
Полное перемещение зеркала зависит от разрешения прибора и может составлять в современных приборах 1-2 м.
Известно электромагнитное устройство с магнитным перемещением, содержащее подвижной сердечник, вокруг которого намотана,катушка управления, пересекающая магнитное поле в пря яолинейном воздушном зазоре, образованном внутренним и внешним параллель ными полюсными элементами противоположной полярности 1. Для обеспечения продольного перемещения сердечник поддерживается подшипниками и спиральной пружиной.
Устройство предназначено для небольших линейных перемещений, однако оно не обеспечивает достаточной точности перемещения и позиционирования, особенно в условиях вибрации.
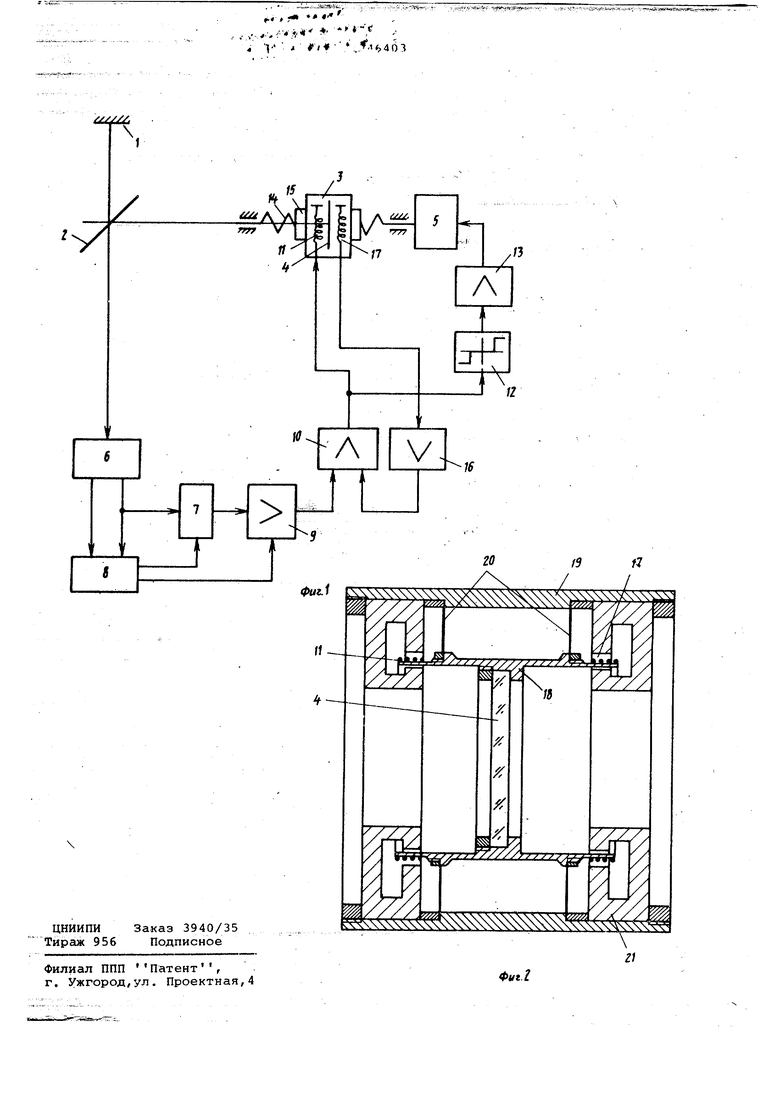
Достаточная точность позиционирования может быть обеспечена устройством, являющимся наиболее близким к изобретению 2. Привод подвижного зеркала интерферометра разделен на два канала: грубый, перемещающий каретку, на которой закреплен подвижный отражатель ( кошачий глаз ) и точный, осуществляющий перемеще. ние малого зеркала, кошачьего гла. 3 а , либо . вспомогательного зеркала, введенного в одно из плеч интерфеР метра. Точный канал выполнен пьёзоэлементах. Сигнал рассогласования (разность между фактическим поло 1сёниём зеркала и заданным) поступает параллельно на грубый и точный каната лы S Момент стабилизации оптической разности хода. Устройство имеет сложную конструк цию: грубый канал регулирования выполнен в видэ линейного двигателя, перемещение каретки которого происходит на масляной подушке, точный ка нал регулирования выполнен на пьезо элементах, для работы е.гб требуется высокое (порядка нескольких киловольт) напряжение. Это вызывает трудности в управлении, особенно в условиях вакуумирования, так как это часто требуется для Фурье-спектромет ров. Для демпфирования точного канал используется силиконовое масло, что приводит к сильной зависимости степе ни демпфирования от температуры. Кроме того, устройство имеет низкое общее быстродействие, обусловлен ное большой массой привода, а также тем, что быстродействие точного канала не используется для быстрого пе Пе)ем1е14ений, так как все ззрёмённыё парамётры опредёляютСя работой грубого привода. Целью изобретения является упроще конструкции и повышение быстродействия устройства. Это достигается тем/ что устройст во содержит пороговый элемент и закрепленный внутри корпуса полый цилиндр, внутри которого расположено подвижное зеркало интерферометра, а на периферийных у«1астках)1ИлиндриЧёской поверхноЬти установлены посто янные магниты и входящие в их зазоры 1с1Щ Жа якатушка и катушка обратной связи, соединенные между собой через усТ1лИтел ь цепи обратной связи и сум мирующий усилитель, выход которого через пороговый элемент прдкллочен к у гюд йжной к НИИ на ней корпусом полого цилиндра. С целью повышения точности позици ЬЙЙ1 Ьванйя полый цилиндр подвешен внутри корпуса на гибких элементах - диафрагмах. ;.. На фиг. 1 изображ1ена схема предУ л:агаемого привода j на фиг. 2 - конструкция магнитоэлектрической головки. Предлагаемый привод содерю т 1п8йвйжн6ё зеркало Г,1свётодёлител ь 2 точный канал регулирования, мдгнито элёкт рй чёскую головку 3, обесНёчИвающую точное регулирование положения 034 подвижного эеркала 4, и привод подвижной каретки - электродвигатель 5, обеспечивающий грубое регулирование положения, подвижного зеркала 4. Выходной сигнал интерферометра, поступающий со светоделителя 2, регистрируется блоком б фотоэлектронных умножителей, выходы которого соединены через аналоговь й ключ 7, управляемый от блока 8 управления, с корректирующим усилителем 9. Выход усилителя через суммирующий усилитель 10соединен с силовой катушкой 11 . магнитоэлектрической головки 3 и через пороговый элемент 12 и усилитель 13 - с электродвигателем 5, осуществляющим посредством пары винт 14 гайка 15 грубое перемещение подвижного зеркала 4. Блок б, ключ 7, блок 8 и усилители 9, 10 и 16 входят одновременно в точный и в грубый каналы. Суммирующий усилитель 10 вместе с усилителем 16 цепи обратной связи образует цепь обратной связи силовой катушки 11 и катушки 17 обратной связи. Магнитоэлектрическая головка содержит полый цилиндр 18, подвешенный в корпусе 19 на упругой подвеске (например, диафрагмах 20), который допускает перемещение цилиндра 18 только в продольном направлении.. На периферийных участках цилиндра 18 расположены две катушки - силовая 11и обратной связи 17 входящие в кольцевы1е зазоры постоянных магнитов 21. Работа привода осуществляется следующим образом. По сигналу блока 8 управления корректирующий усилитель 9 вырабатывает пилообразное напряжение, поступающее затем на вход суммирующего усилителя 10. После соответствующего усиления это напряжение прикладывается к силовой католике 11 магнитоэлектрической головки 3. В зависимости от сигнала катушка 11 втягивается или выталкивается из зазора магнита 21, перемещая полый цилиндр 18 и вместе с нИм подвижное зеркало 4. В зависимости от направления перемещения катушка 17 также начинает втягиваться или выталкиваться из зазора магнита 21 и в ней бут дет наводиться ЭДС самоиндукции Е, величина которой пропорциональна скорости перемещения катушки 17 относительно корпуса устройства 19 магнитоэлектрической головки 3, т. е. г а(Хп-Ха) где X . - положение зеркала 4 вдоль оптической оси прибора; Хя положение корпуса вдоль оптической оси прибора. Корпус 19 магнитоэлектрической головки 3, как правило, жестко соединен с основанием, например, парой винт 14-гайка 15, и имеет существенно большую по сравнению с зеркалом массу, поэтому колебания его вдоль оптической оси незначительны. Конструкция подвесок 20 обеспечивает только одну степень свободы подвижного зеркала - перемещение вдоль оптической оси. Обеспечить большую жес кость крепленая подвижного зеркала невозможно, так как точный привод должен быть быстродействующим, безлюфтовым и безынерционным. В силу этих причин dX2 dX производная DT перемещения зеркала относительно корпуса прибора пропорциональна производной от перемещения зеркала вдоль оптической оси прибора, и ее.можно использовать для стабилизации системы управления приводо Сигнал на выходе катушки обратной связи усиливается усилителем 16 и по ступает на суммирующий усилитель 10. Изменяя коэффициент усиления усилителя 16, можно в широких пределах из менять степень демпфирования возникающих в магнитоэлектрической головке 3 колебаний. Сигналом для включения грубого ка нала регулирования является выходное напряжение суммирующего силителя 10 точного привода, которое предварительно подается на пороговый элемент 12, Такое включение позволяет максимально использовать быстродействие точного канала для перемещения подви ного зеркала и существенно сни:зить требования к грубому каналу, задачей которого является следить, чтобы напряжен ие на выходе усилителя 10 нахо дилось внутри зоны нечувствительности порогового элемента 12. По достижении заданной оптической разности хода усилитель 9 переводитс в режим фильтра низких частот и открывается аналоговый ключ 7. Этим включается обратная связь, и схема пiepexoдит в режим стабилизации оптической разности хода. Испытания опытного образца показа ли, что подбирая коэффициент усилени усилителя 16 (т, е, степень демпфирования колебаний), можно обеспечить высокий запас устойчивости и высокое быстродействие привода. Выполнение привода подвижного зер кала интерферометра в соответствии с предлагаемой схемой позволит значительно (по сравнению с известным) улучшить параметры привода. Для его
746403 изготовления не требуется прецизионного оборудования и точной обработки, деташи не дорогие. Осуществление точного регулирования с помощью магнитоэлектрической головки позволяет улучшить характеристики привода г i рабочая скорость увеличена с 40 мкм/сек до fOO мкм/сек, коэффициент передачи точного канала & 210 мкм/В до 3 мкм/В, Упрощение грубого канала стало возможным благодаря тому, что для точного перемещения используется быстродействующий точный канал, а грубый - лишь для возвращения с невысокой точностью (около 5 мкм) магнитоэлектрической головки в центр зоны работы точного кангша. В опытном образце зона работы точного канала составляла ±20 мкм от нейтрального положения, Формула изобретения 1, Привод подвижного зеркала интерферометра, содержащий грубый ка- . нал регулирования с приводом подвижной каретки и точный канал регулирования положения подвижного зеркала ни терферометра, вход каналов регулирования соединен с выходом интерферометра, а суммирующий усилитель каналов регулирования соединен с цепью обратной связи, отличающийся тем, что, с целью упрощения и повышения быстродействия привода, он содержит пороговый элемент и закрепленный внутри корпуса полый цилиндр, внутри которого расположено подвижное зеркало интерферометра, а на периферийных участках цилиндрической поверхности установлены постоянные магниты и входящие в их зазоры силовая катушка и катушка обратной связи, соединенные между собой через усилитель цепи обратной связи и суммирующий усилитель, выход которого через пороговый элемент подключен к приводу подвижной каретки с размещенным на ней корпусом полого цилиндра, 2, Привод по п, 1, отличающ и и с я тем, что, с целью повышения точности привода, полый цилиндр закреплен внутри корпуса на гибких элементах, Источники информации, принятые во внимание при экспертизе 1,Заявка ФРГ 2147432, кл, Н 02 К 41/00, опубл, 1973, 2,Жижин Г, Н, Инфракрасная а ппаратура высокого разрешения, М,,Мир1 1972, с, 88 (прототип).
, -...,, .-, -.,.-. ,.,:-..-„ :-,...-1 .. ; ..,....-. -I
. f- r ... .4бЗ
/5
. .-;й -- ffi fif:sffff; :i
1 J /Z
f
f7
f9
