Изобретение относится к области авто матики и вычислительной техники и може быть использовано при построении автоматических систем анализа и распознавания изображений, например, цитологических и гистологических срезов. Известен способ распознавания просты конфигураций изображений, оснобанный на фотоэлектрическом преобразовании при построчном разложении изображения, ква товании полученного видеосигнала по амплитуде на два уровня, задержке квантованного сигнала на время длительности гь строк и ru элементов разложения, одновременного анализа исходного и задержанных сигналов и принятии решения на основе сравнедия с эталоном,.представляющим собой отрезок контура определенной длины ll . Недостатком указанного способа явля ется низкая помехоустойчивость, обусловленная ослаблением кГоррелядионных связей между элементами, в результате которой предъявляемый объект не иденти фицируется с эталоном, что приводит к ошибкам распознавания объектов простой конфигурации. Наиболее близким по технической сущности к изобретению является способ расhoзнaвaния объектов, основанный на формировании видеосигнала при построчном разложении изображения, квантовании VK дёосигнала по уровню, задержке квантованного сигнала на время длительности строки разложения, вычитании задержанного сигнала из тжущего квантованного и принятии решения 2 . Недостатком способа является низкая достоверность распознаващя объектов, вследствие того, что не используется информация об ориенташга отрезков контуров объектов. Целью изобретения является повышение достоверности распознавания объектов. Эта цель достигается тем, что формируют видеосигнал при построчном раэпожении изображения, квантуют вицеоснгнал par уровню, задерживают квантовант ныи сигнал на время длите/тьности элё йёнта разложения, вычитают его из ква тованного сигнала, задерживают получекн ные разностные сигналы смежных элемен-. тов разложения на время длительности строки разложения, задерживают квантованный сигнал на время длительности строки разложения, вычитают задержанный сигнал из текущего кванто нного, фиксируют совпадение во времени разностные сигналы смежных строк с разностными сигналами смежных элементов, определяют полярность последних и принимают решение.
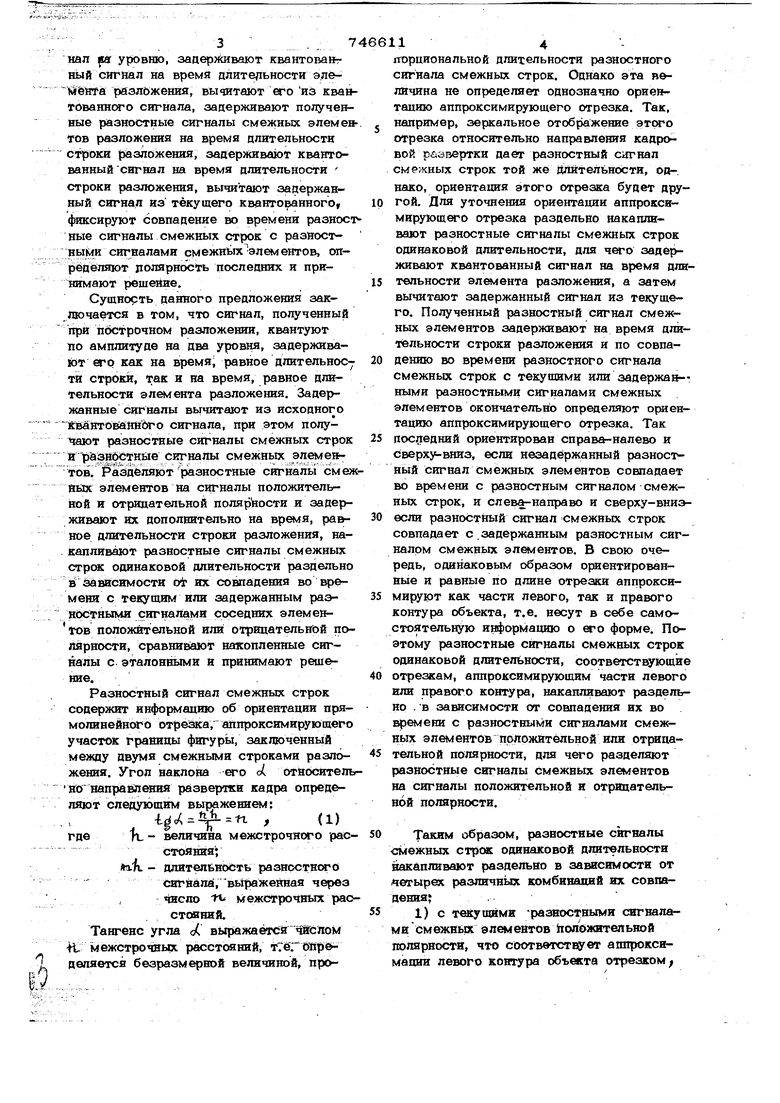
Сущность данного предложения заключается в том, что сигнал, полученный при построчном разложении, квантуют по амплитуде на два уровня, задерживаjDT его как на время равное длительное- 20 ти строки, так и на время, равное длительности элемента разложения. Заде жанные сигналы вьгчитают из исходного KMHTOBaHHibro сигнала, при этом полуЧают разностные сигналы смежных строк И разностнйе сигналы смежных элементов. 1Раёдёляют разностные сигналы смеж ных элементов на сигналы положительной и отрицательной полярности и Задерживают их дополнительно на время, равное длительности строки разложения, накапливают разностные сигналы смежных строк одинаковой длительности раздельно в Зависимости от их совпадения во времени с текущим или задержанным раэНбСТными сигналами соседних элементов положительной или отрицательной полярности, сравнивают накопленные сигналы с эталонными и принимают . Разностный сигнал смежных строк содержит информацию об ориентации прямолинейного отрезка, аппроксимирующего участок границы фигуры, заключенный между двумя смежными строками разложения. Угол наклона его о( относитель но направления развертки кадра определяют следующим выражением: . ,(1) величина межстрочного рас стояния; (и.А. - длит елбноеть разностного сигНала,вЫражеНная через число 1 межстрочных рас стовний. Тангенс угла с вырйжаётсй 8Гспом ft межстроадых расстояний, т .вГ бжр деляется безразмерной величиной, пролорциональной длительности разностного сигнала смежных строк. Однако эта величина не определяет однозначно ориентацию аппроксимирующего отрезка. Так, например, зеркальное отображение этого отрезка относительно направления кадровой развертки дает разностный сагнал смежных строк той же длительности, однако, ориентация этого отрезка будет другой. Для уточнения ориентации аппроксимирующего отрезка раздельно накапливают разностные сигналы смежных строк одинаковой длительности, для чего задерживают квантованный сигнал на время длительности эпемвпта разложения, а затем вычитают задержанный сигнал из текущего. Полученный разностный сигнал смежных элементов задерживают на время длительности строки разложения и по совпадению во времени разностного сигнала смежных строк с текущими или задержанными разностными сигналами смежных элементов окончательно определяют ориентацию аппроксимирующего отрезка. Так росгтедний ориентирован справа-налево и сверху-вниз, если незадержанный разноса нь1й сигнал смежных элементов совпадает во времени с разностным сигналом смежных строк, и слева-направо и сверху-внизесли разностный сигнал смежных строк совпадает с .задержанным разностным сигналом смежных элементов. В свою очередь, одинаковым образом ориентированные я равные по длине отрезки аппроксимируют как части левого, так и правого контура объекта, т.е. несут в себе самостоятельную информацию о его форме. Поэтому разностные сигналы смежных строк одинаковой длительности, соответствующие отрезкам, аппроксимирующим части левого или правого контура, накапливают раздельно . в зависимости от совпадения их во времени с разностными сигналами смежных элементс в положительной или отрицательной полярности, для чего разделяют разностные сигналы смежных элементов на сигналы положительной и отрицательной полярности. Таким образом, разностные сигналы смежных CTptMc одинаковой длительности накапливают раздельно в зависимости от .четырех различных комбинаций их совпадения;. 1) с текущими -разностными сигналами смежньпс элементов hoлeжитeльнoй полярности, что соответствует аппроксимации левого контура объекта отрезком; 2)с текущими разностными сигналами смежных элементов отрицательной полярноста, что соответствует аппроксимации правого контура объекта отрезком, ориевР тированным справд-налево и сверху-вниз; 3)с задержанными разностными сигналами смежных элементов положительной полярности, что соответствует аппрйксимации левого контура объекта отрезком, ориеоткрованным слева-направо и сверху -вниз4) с задержанными разностными сигналами смежных элементов отрицательной полярности, что соответствует аппроксимации правого контура объекта отреэком, ориентиро|9анным слева-направо и сверху-вниз. Накопленные разностные сигналы смежных стрсйс сравнивают с эталонными, например, по правилу Si,JXiK-XL./,(2) i - отсчет гистограммы разностных сигналов смежных строк i -ой длительности, k -ой комбинации (,2,3,4 j -го класса, и принимают решение о принадлехшос- , ти опознаваемого объекта J-му классу, для которого величина j минимальна. На фиг, 1 изображены четыре комбинации прямого края контура объекта (тело объекта заштриховано) и соответствующие каждой комбинации разностные сигнапы i -ой и ( +1)-ой смежных строк раз.
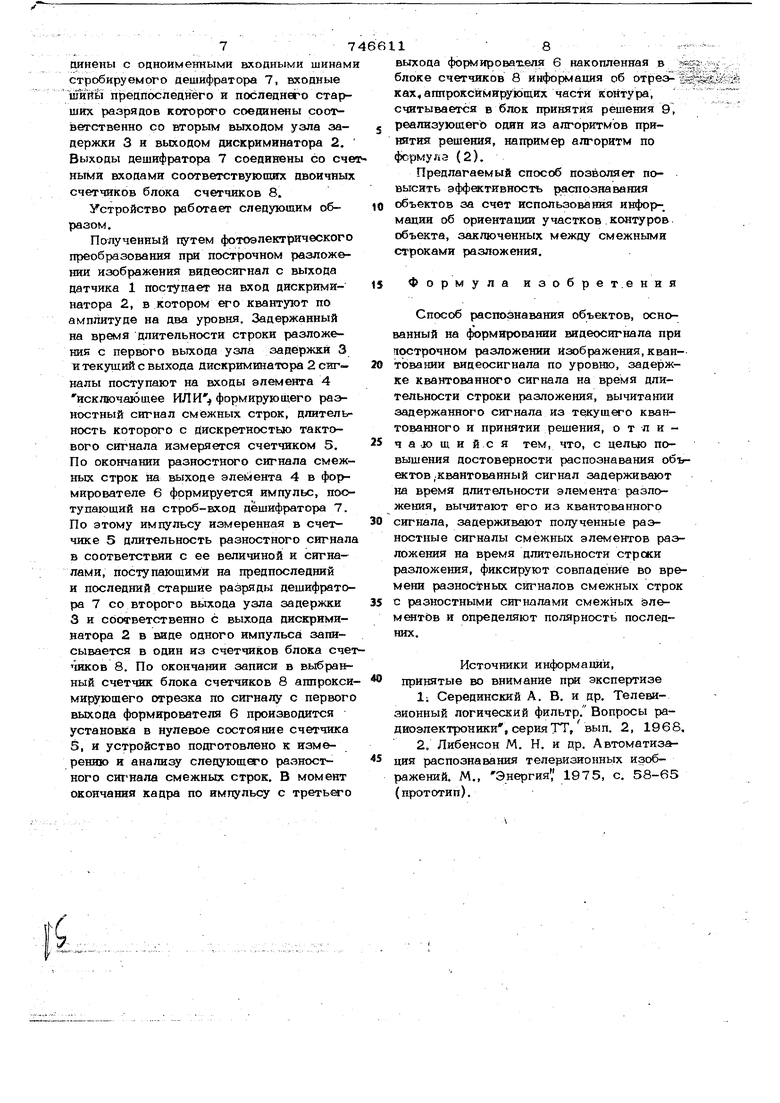
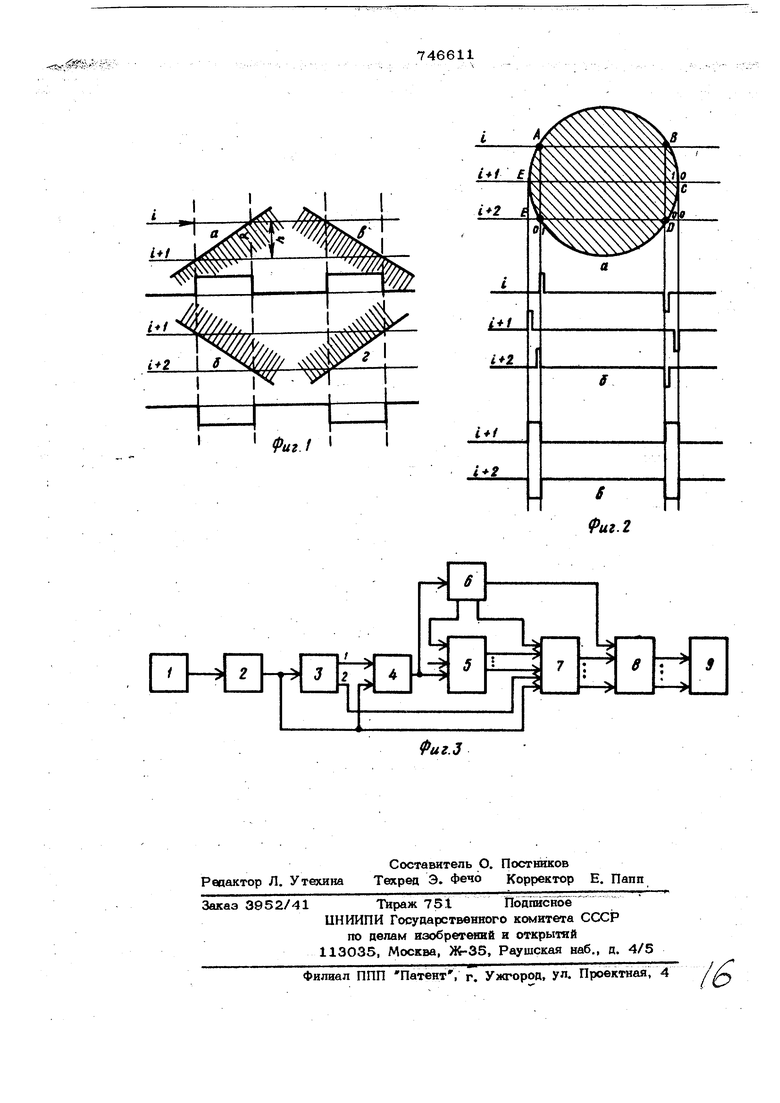
ложения одинаковой длительности; на фиг, 2, а изображен объист и i, H-l, t+2 строки его разложения, на ; фиг, 2,6 разностные сигналы смежных элементов соответствующих строк разложения г на фиг, 2, в - разностные сигналы соответствующих смежных строк разложения; яа фиг, 3 приведена функциональная схе- ма устройства, реализующего предлагавмый способ,Как 1ШДНО из фиг. 1, части контура объекта, заключенные между смежными L и t+l стрсжами разложения, несут различную информацию о форме объеста, поскольку пр-разнрму ориентированы (случай а и б) 1И, кроме того, принадлежат в случае а левому контуру (вхождение в объект по направлению ска нирования, указанному стрелкой) ив случае в - правому контуру (выход из объекта).
диненные, телевизионный датчик 1, амплитудный дискриминатор 2 и узел задержки, обеспечивающий задержку текущего сигнала на выходе на емя длительности строки разложения, на втором выходе - на время длительности элемента разложения. Выход дискримивитора 2 соединен также с первым входом дения разностного сигнала смежных строк с текущим или задержанным разностными сигналами смежных элементов положительной или отрицательной полярности, изображенные на временной диаграмме (фиг. 2,6 2,в), показаны на фиг, 2,а, когда момент гжончания разностного сигнала смежных строк характеризуют комбинацией сигналов логической и логического 0% следующих друг за другом. Так часть контура АР (фиг. 2,а) аппроксимируют отрезком а (фиг, 1), что соответствует первой комбинации, характеризующейся последовательным появлением двух сигналов логической (фиг, 2, а), часть контура .СД (фиг. 2,а) аппроксимируют отрезком Т (фиг, 1), что соответствует второй комбинации, характеризующейся последовательным появлением двух сигналов логического О (фиг, 2,а). Часть контура FE (фиг. 2,а) аппроксимируют отрезком б (фиг. 1), что соответствует третьей 1юмбинасни, характеризующейся последовательным появлением сигналов логического О и логической (фиг, 2,а), а часть контура ВС (фаг.2,а) аппроксимируют отрезком в (фиг, 1), IJTO соответствует четвертой комбинации характеризующейся последовательным появлением сигналов логической и логического О (фиг, 2,а). Устройство реализует предложенный способ путем раздельного накопления аппроксимирующих эта час-га контура отрезкое и содержит последовательно соелогического элемента 4 исключающее ИЛИ, второй вход которого соединен с первым выходом узла 3, Выход элемента 4 соединен со счетным входом двоичн ного счетчика 5 и входом фо{ лироватвля 6 управляющих сигналов, первый выход которого соединен с шиной установки нуля счетчика 5, второй выход - со строб-входом дйнифратора 7, а третий выход - с управляющим входом блока счетчиков 8 вькоды которого соединены со входами блока принятия решения 9, Шина тактового сигнала соединена с тактовым входом счетчика 5, выходные шины koTOpwo совоинены с одноименными входными шинам стробируемого дешифратора 7, входные шййй предпоследнего и последнего старших разрядов которсяго соединены соответственно со вторым выходом узла задержки 3 и выходом дискриминатора 2. Выходы дешифратора 7 соединены со сче ными входами соответствующих двоичных счетчиков блока счетчиков 8. Устройство работает следующим образом. Полученный путем фотоэлектрического преобразования при построчном разложении изображения видеосигнал с выхода датчика 1 поступает на вход днскриминатора 2, в котором его квантуют по амплитуде на два уровня. Задержанный на время длительности строки разложения с первого выхода узла задержки 3 и текущий с выхода дискриминатора 2 сиг налы поступают на входы элемента 4 исключающее ИЛИ формирующего разностный сигнал смежных строк, длительность которого с дискретностью тактового сигнала измеряется счетчиком 5. По окончании разностного сигнала смежных строк на выходе элемента 4 в формирователе 6 формируется импульс, поступающий на строб-вход дешифратора 7. По этому импульсу измеренная в счетчике 5 длительность разностного сигнал в соответствии с ее величиной и сигналами, поступающими на предпоследний и последний старшие разряды дешифратора 7 со второго выхода узла задержки 3 и соответственно с выхода дискриминатора 2 в иаде одного импульса записывается в один из счетчиков блока сче ицсов 8. По окончании записи в выбранный счетчик блока счетчиков 8 аппрокси мирующего отрезка по сигналу с первого выхода формирователя 6 производится установка в нулевое состояние счетчика 5, и устройство подготовлено к измерению и анализу следующего разностного сигнала смежных строк. В момент окончания кадра по импульсу с третьето выхода формирюва-Е.еля 6 накопленная в « блоке счетчиков 8 информация об отрегь Щ ках/аппроксймиру1бщйх части контура, считывается в блок принятия решения 9, реализующего один из алгоритмов принятия решения, например алгоритм по формула (2). Предлагаемый способ позволяет повысить эффективность распознавания объектов за счет использования информации об ориентации участков контуров объекта, заключенных между смежными строками разложения. Формула изобрет.ения Способ распознавания объектов, основанный на формировании видеосигнала при построчном разложении изображения, квантовании видеосигнала по уровню, задержке квантованного сигнала на время длительности строки разложения, вычитании задержанного сигнала из текущего квантованного и принятии решения, отличающийся тем, что, с целью повышения достоверности распознавания объастов квантованный сигнал задерживают на время длительности элемента разложения, вычитают его из квантованного сиг1юла, задерживают полученные раэностные сигналы смежных элементов разложения на время длительности стрски разложения, фиксируют совпадение во времени разностных сигналов смежных строк с разностными сигналами смежных элемеятов и определяют полярность последних. Источники информации, принятые во внимание пря экспертизе 1; Серединский А. В. и др. Телевизионный логический фильтр. Вопросы радиоэлектроники, серия ТТ, вып. 2, 1968, 2, Либенсон М. Н. и др. Автоматизация распознавания телеризионных изображений. М., Энергия, 1975, с. 58-65 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ выделения признаков при распознавании изображения | 1981 |
|
SU1048492A1 |
| Устройство для распознаванияОбРАзОВ | 1977 |
|
SU798906A1 |
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТА | 1990 |
|
RU2090929C1 |
| Способ формирования видеосигнала изображения | 1990 |
|
SU1771080A1 |
| Телевизионный селектор движущихся объектов | 1980 |
|
SU890950A1 |
| Устройство для измерения длины участков контура изображения | 1980 |
|
SU983729A1 |
| Способ измерения периметра изображения фигуры | 1971 |
|
SU512643A1 |
| Способ поиска изображений линейных объектов | 1981 |
|
SU968833A1 |
| Устройство для распознавания дефектов изображений объектов | 1982 |
|
SU1023356A1 |
| Устройство для распознавания формы геометрических фигур | 1976 |
|
SU669362A1 |
LLL
г
Фиг. I
/
П
«г.2
гЪг-ъН
, -
в
:
Ll
tf.J
