(54) УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи информации | 1981 |
|
SU1073786A2 |
| Адаптивный коммутатор | 1976 |
|
SU643944A1 |
| Устройство обработки информации | 1979 |
|
SU822350A1 |
| Многоканальный коммутатор для системы передачи информации | 1975 |
|
SU543972A1 |
| Адаптивный коммутатор | 1976 |
|
SU618861A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИНФОРМАЦИИ | 1996 |
|
RU2097703C1 |
| Телеметрическое устройство | 1979 |
|
SU858061A1 |
| УСТРОЙСТВО ДЛЯ СБОРА, ОБРАБОТКИ И ПАКЕТНОЙ ПЕРЕДАЧИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФИЗИЧЕСКОЙ СРЕДЫ | 1994 |
|
RU2079881C1 |
| Адаптивный коммутатор | 1982 |
|
SU1061170A1 |
| Адаптивный коммутатор | 1979 |
|
SU782173A2 |
Изобретение относится к области телемеханики и может быть использовано в системах сбора данных/ в многоканальных системах измерения, конт ролй и управления, в том числе в телеизмерительных системах для сокращения избыточности коммутируемых . данных. Известны устройства для передачи информации, содержащие ключи, анализатор информации, блок суммирования, деления, сравнения, предназначенные для сокращения избыточности измерительных данных М,И В таких устрой ствах блоки работают последовательно 1И. по жесткой программе, причем часть /блоков: анализатора информации аналогична внешним блокам (суммирования деления, сравнения наиболее сложных .по построению), поэтому из-за жесткости программы Иневозможности многоцелевого применения блоков (как для анализа сигналов, так и для перестройки частот опроса сигналов) они имеют низкое быстродействие, определяемое суммарным временем последовательной работы всех блоков. Известны также анализаторы информации, например коррелометры, состоя щие из соединенных последовательно аналого-цифровых преобразователей (АЦП), оперативного ЗУ, арифметического устройства ЗУ вёроятностн йх :характеристик, входы которых соединены с блоком управления жесткой (программой 3. Недостатком коррелометров является жесткость управления связями и параметрами их основных узлов, а отсюда низкое быстродейст- вие анализа информации в многоканальных системах и слоясность использования их в качестве анализаторов информации . Наиболее близким по технической сущности к изобретению является устройство для передачи информации, содержащее датчики, выходной блок и групповой адаптивный коммутатор, включающий многоканальный АЦП, первый выход котброгб соединён со входом оперативного запоминающего б.пока, коммутатор опроса, первый вход которого объединен с вторым входом многоканального АЦП и подключен к выходам датчиков, многоканальный генератор частот, первый выход которого соединен со вторым входом коммутатора опроса, первый вход - с первым выходом программного запоминающего блока адресов, запоминающий блок
программ частот, запоминающий блок вероятностных характеристик, арифметический блок, выходы которого соединены соответственно с первым входом блока деления и входом блока определения тактовой частоты, первый выход когФ1утатора опроса подключен к первому выходу устройства, ко второму выходу которого подключен второй выход программного запоминакадего блока адресов 4.
Недостатком устройства является низкое быстродействие определения текущей оптимальной программы частот
Целью изобретения является повышение быстродействия устройства при исследовании многомерных случайных процессов.
Эта цель достигается тем, что в устройство для передачи информации введены дополнительные групповые адаптивные коммутаторы, регистры, блик коммутации, блок программного управлений, первые выход и вход которого через первый регистр соединены с первым входом и выходом блока коммутации, вторые выход и вход чере второй регистр - с входом и выходом выходного блока. В каждый групповой адаптивный коммутатор введены блоки коммутации, управляющий, выходной и дополнительный регистры, блок программного управления, программный запоминающий блок вариационных рядов частоты. Вторые выход и вход АЦП, выход и второй вход оперативного запоминающего блока, выход и вход арифметического блока и запоминшмцегр блока вероятностных характеристик соединены соответственно через первый, второй, третий и четвертый дополнительные регистры с первыми, вторыми, третьими и четвертыми входами и выхоДс1ми первого блока коммутации, пятые выход и вход которого соединены с , первыми входом и выходом управлякяцег регистра. Выход и третий вход xoMf-iyтатора опроса, вторые выход и вход многоканального генератора частот, второй выход и вход программного запоминающего блока адресов, выход и вход программного запоминающего блока вариационных рядов частот и запоминающего блока программ частот соединены соответственно через пятый шестой-, седьмой, восьмой и девятый доп элнительные регистры с первыми, вторыми, третьими, четвертыми и пятыми входами и выходами второго блока коммутации, шестые выход и вход которого соединены со вторыми уходом и выходом управляющего регистра, третьи выход и вход которого соединены с первыми входом и выходом блока программного управления, вторые выход и зход которого через выходной регистр соединены со вторыми входами и выходами блока коммутации.
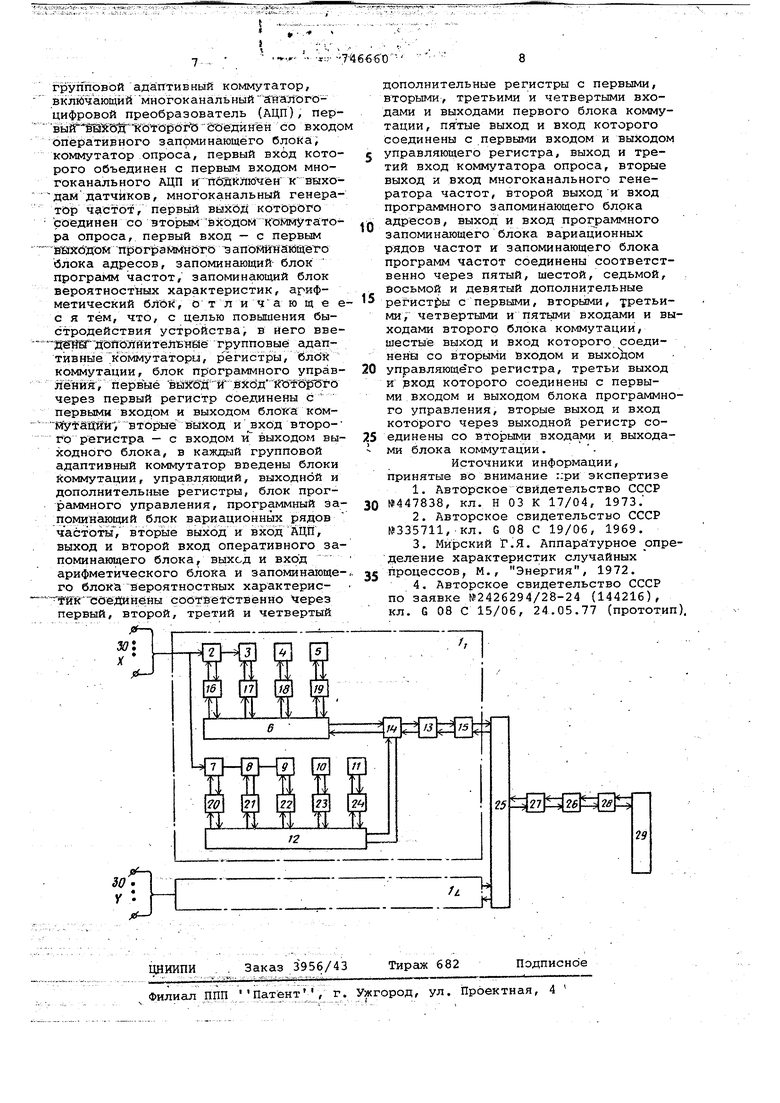
На чертеже приведена структурная схема предлагаемого устройства.
Оно содержит групповые адаптивные коммутатрры , многоканальный АЦП, оперативный запоминающий блок 3, арифметический блок 4, запоминающий блок вероятностных характеристик 5, первый блок коммутации 6, коммутатор опроса 7, многоканальный генератор частот 8, программные запоминающие блоки адресов 9, вариационных рядов частот 10 запоминающий блок программ частот 11, второй блок коммутации 12, блок программного управления 13, управляющий регистр 14, выходной регистр 15, дополнительные регистры (первый-девятый) 16-24, блок коммутации 25, блок программного управления 26, первый 27 и второй 28 регистры, выходной блок 29 и датчики 30.
Предлагаемое устройство состоит из одинаковых групповых адаптивных коммутаторов , которые работают по одинаковых программам Р PU Поэтому рассмотрим принцип работы группового адаптивного коммутато ра l по програла е Р , задаваемой в блок программного управления 13 через его выходной регистр 15, блок коммутации 25, первый регистр 27 блока программного упратвления 26.
Группа сигналов с датчиков 30 поступает в многоканальный АЦП 2 и коммутатор опроса 7. АЦП 2, оперативный запоминающий блок 3, арифметический блок 4, запоминающий блок вероятностных характеристик 5, дополнительные регистры 16-19, первый блок коммутации 6, управляющий реристр 14 и блок прогргилмного управления 13 совместно определяют набор Корреляционных функций К. сигналов X по рекуррентному алгоритму RK - «ки+ РК(ПК - RKH)
(1)
Пх Х Х,.;
где R, RK-I текущая и предыдущая
оценки R;
Пц - текущее произведение значений Х, на задержанные значения на эсщержку tj - - весовой коэффициент;
/it - шаг на задержке. Отсчеты Хц формируются из сигналов X X в АЦП 2. Задер канные отсчеты XK-VCJ получаются в оперативном запоминающем блоке 3, Все арифметические операции в алгоритмах (1) вьшолняются в арифметическом блоке 4 Запоминающие оценок Кц-д осуществляется в запоминакяцем блоке 5.
Обмен данными между блоками 2, 3, 4 и 5 осуществляется через однотипные дополнительные регистры (с ключамн обмена командами) 16, 17, 18 и 19, первый блок коммутации 6 по командам с блока программного управления 13 через его управляющий регистр 14. После N циклов будут получены корреляционные функции К, Затем производится нормирование корреляционных функций р}/р R(t)/R(0), R(0) - нулевая ордината функций R и определение интервалов корреляции а ° алгоритмам Pr- b PjdpfVi-Qi-iX (2) T(Qa-Q.,), , j a где Q , Qj.i текущая и предыдущая оценки средней суммы ординат pfC.j); |p(t)l - модуль j-й ординаты функции р(-с1; QJ,, - оценка средней суммы при , когда (Qq- Qv ) впервые больше или равна нулю; й-Т - шаг по аадержке. По полученным оценкс1М Т(, опреде ляются частоты опроса каналов ia, fo-ty по каждому каналу. При этом оп зеделение р,0,:0,производится совместно оперативным запомингиощим блоком 3 (хранит текущие оценки), арифметическим блоком 4 (выполняет все арифметические операции алгорит мов (2)), запомина1 щим блоком вероя ностных характеристик 5, дополнител ными регистрами 18, 19, управляющим регистром 14 и первым блоком коммутации 6 по командгил с блока програм много управления 13. Совместно оперативным запоминающим блоком 3, арифметическим блоком 4, запоминающим блоком вероятностных характеристик 5, дополнительными регистрами 17, 18, 19, управляющим регистром 14, первым и вторым блоками коммутации 6 и 12, програм|мным запоминающим блоком вариационных рядов частот 10, дополнительным |регистром 23 по командам с блока jnporpciMMHoro управления 13 произво дится упорядочивание частот |вариационный ряд частот f с адресами и разбиение на m равных трупп по п канапам. При этом все оп рации по перебору и сравнению часто fa выполняются совместно блоками з, 4, 17, 17, 6 и 14, а оценки f, запоминаются в блоке 10- Адреса А частот f эапоминёцотся в программн запоминающем блоке адресов 9. Совме стно блокалш 3,10 дополнительными р гистрами 23, 17, первым блоком 6, регистром 14 и вторым блоком коммутации 12 по командам с блока програ много управления 13 производится вы ление N-ых частот из вариационного ряда t) которые запоминаютс в блоке 3. С помощь блока 4, регис ров 18, блока коммутации 6, регистров 17 и блока 3 определяется cyvn apная тактовая частота f,j « . , 6 f, а также откосительные частоты § to,-/fo. §1,ИьЬ, ные относительные частоты |а, за- . поминаются вместо оценок f в блоке 3. Затем с блока 11 через регистр 24, блок коммутации 12, регистр 14, блок коммутации 6, регистр 18 в арифметический блок 4 вызываются наборы допустимых частот } , которые почленно сравнивсшзтся с набором частот §ъ например, по mtn (|,ia,.- bc,,-l). (3) где .д.- члены допустимых частот. эазностей при которых сумма членов измеренных пустимых Ьц частот минимальна. . . Выбранный набор допустимых-частот с блока 11 через регистр 24, блок коммутации 12 и регистр 21 записывается в генератор частот В, куда также с блока 3 через блоки 17, б, 14 и 21 вызывается тактовая частота f(j, а адрес А выбранного допустимого набора частот Ьр с блока 11 через блоки 24, 12, 22 записываются в блок адресов 9, который управляет распределением адресов частот fai формируемых в генераторе частот 8 из относительных частот Ьо и тактовой частоты fr В соответствии с частотами { f д и адресами А производится управление частотами и адресами опроса коммутатора 1. Из описания работы группового адаптивного коммутатора 1 видно, что в отличие от прототипа в предложенном устройстве максимально используются возможности меньшего числа функциональных узлов при максимально возможной скорости асинхронного обмена между ними через однотипные регистры 16-24, блоки коммутации 6, 112 и управляющий регистр 14. При этом управление групповыми адаптивными коммутаторами . производится с помощью однотипных выходных регистров 15 блока ком1лутации 25, регистра 27, 28, блока программного управления 26 по общей программе PQ , хранимой в блоке программного управления 26, программа PQ в которой может задаваться ,с помощью вторых регистров 28 и выходного блока 29. Такое построение устройства передачи информации позволяет максимально использовать скорость обмена ме)хду любыми блоками групповых адаптивных коммутаторов X, а значит при данной совокупности функциональных блоков 2, 11 и 13 можно достигнуть макси1иального быстродействия адаптивной программной коммутации. . Формула изобретения . . . Устройство для передачи информации, содержащее датчик, выходной блок и
