(54) СПОСОБ УПРАВЛЕПИЯ ПРОДВИЖЕНИЕМ ЦИЛИНДРИЧЕСКИХ МАГНИТНЫХ ДОМЕНОВ
1
Изобретение относится к области вычислительной техники и может быть использо-ваио при построении ЗУ на цилиндрических магнитных прменах (ЦМД).
Известен способ управления продвижением ЦМД в магнитоодноосных ферромаг- 5 нетиках с нанесенными на их поверхность магнитопленочными аппликациями 1. Известный способ заключается в создании магнитного поля, вращающегося в плоскости, перпендикулярной к направлению намагниченности ЦМД. Вращающееся магнитное ° поле создается переменным электрическим током, протекающим через взаимно перпендикулярные катущки, причем токи в катущках имеют сдвиг по фазе на 90°, а область, в которой создается вращающееся ,5 магнитное поле, ограничена пересечением образующих катущеК;
Такой способ управления ие позволяет изменить скорость перемещения ЦМД без изменения частоты вращающегося поля и не позволяет изменять направление пере- 20 мещения ЦМД без изменения направления вращения магнитного поля.
Наиболее близким техническим решением к изобретению является способ управления
продвижением ЦМД, основанный на создании переменного вращающегося или перемещающегося скачком магнитного.поля в плоскости пластины, модулируемого по амплитуде 2).
Такой способ не позволяет изменять скорость и направление продвижения ЦМД без изменения частоты и направления вращения поля, кроме того, он применим только для некоторых видов конфигурации магнитопленочных аппликаций.
Целью изобретения является расширение области применения способа путем регулируемого изменения скорости и направления движения ЦМД.
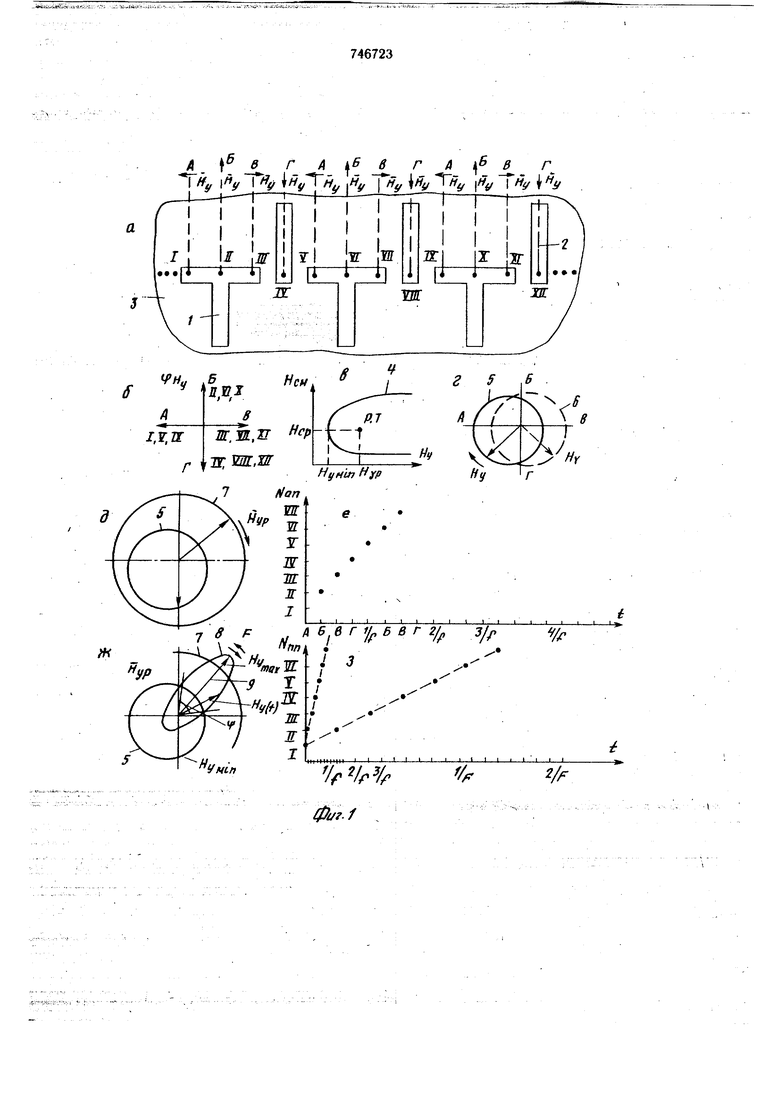
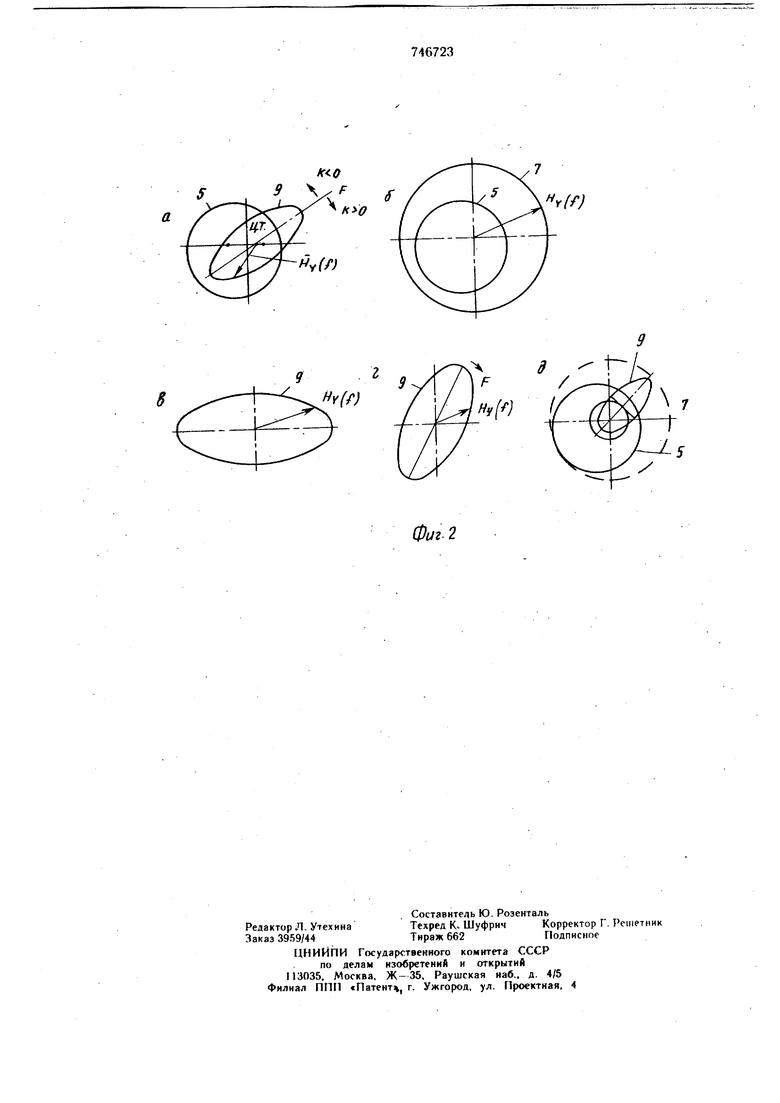
Поставленная цель достигается путем того, что в способе управления продвижением ЦМД, основанном на создании в плоскости доменкосодержащего MaTeptfajia результирующего переменного, например, вращающегося магнитиого поля, образованного суперпозицией составляющих магнитных полей, направленных под углом Друг к другу с задержкой по фазе между собой, амплитуду одного из составляющих магнитных полей модулируют с частотой, равной частоте модуляции фазы или частоты данного поля. В предложеином способе модуляция амплитуды одного из составляющих магнитных полей обеспечивает получение несимметричного годографа вытянутой формы, причем ось, вдоль которой вытянут годограф результирующего переменного магнитного поля, вращается относительно начала координат. Другим отличием предложенного способа от известного является то, что амплитуда вектора MarHHtHoro поля модулируется с частотой вращения оси годографа. Кроме того, амплитуда вектора магнитного поля по больщой реи годографа больще минимального значения поля страгивания магнитного домена и соответствует рабочей точке, а угол раствора годографа, соответствующий наибольшему из минимальных значений поля страгивания, меньще 90°. Направление и частота вращения годографа не зависят от направления и частоты вращения вектора магнитного поля. Поэтому когда амплитуда вектора магнитного поля по всем направлениям, кроме направления оси годографа, меньще значения страгивания магнитного домена, движение магнитного домена происходит соответственно движению большей оси годографа независимо от частоты и направления вращения вектора магнитного поля. На фиг. показана конфигурация канала продвижения ЦМД из магнитопленочных аппликаций Т-1-образной конфигурации; на фиг. 1,6 - фазовая диаграмма работы Т-1-канала; на фиг. 1,в - область работоспособности Т-1-канала; на фиг. 1,г фазовая область работоспособности по магнитному полю управления; на фиг. 1,д - годограф вращающегося магнитного поля управления; на фиг. 1,е - временная диаграмма прохождения позиций Т-1-канала; на фиг. 1,ж - смещенный вытянутый годограф магнитного поля управления; на фиг. 1,3 - временная диаграмма работы Т-1-канала в магнитном поле управления со смещенным вытянутым годографом. На фиг. 2,а показан пример вращающе гося годографа эллиптической формы; на фиг. 2,6 - годограф круговой формы; на фиг. 2,в - эллиптический годограф; на фиг. 2,г - годограф вытянутой формы, вращающийся почасовой стрелке; на фиг. 2,д - вращающийся вытянутый годограф, центр вращения которого движется по круговому годографу. Магнитопленочные аппликации Т-образной 1 и 1-образной 2 конфигурации, нанесенные не пластину 3 одноосного ферромагнетика, например эпитаксиальную феррит-гранаговую пленку, находятся в переменном вращающемся магнитном поле управления Ну (фиг. 1,а). В зависимости от мгновенного положения вектора Яу магнитопленочные аппликации соответственно намагничиваются, и на них создаются притягивающие магнитные домены полюса. Конфигурация аппликаций обуславливает нахождение этих полюсов в определенных местах магнитопленочных аппликаций. Эти притягивающие полюса соответствуют местам локализации магнитных доменов в канале продвижения из Т-1-обраЗных аппликаций (в дальнейщем названы позициями устойчивого положения и обозначены римскими цифрами). Каждая позиция устойчивого положения может локализовать в себе магнитный домен только при определенной фазе ф магнитного поля управления //у. На подобных аппликациях при фиксированной фазе р создаются одинаковые по расположению на аппликации позиции устойчивого положения. На фиг. 1,а фаза f магнитного поля унравления Wy, соответствующая позиции устойчивого положения, обозначена заглавной русской буквой (А, Б, В, Г) и показана стрелкой //у, позиции условно показаны точками, фазовая диаграмма работы Т-1-канала продвижения показана на фиг. 1,6. На осях отмечены фаза и соответствующие этой фазе позиции устойчивого положения. . В каналах продвижения движение магнитных доменов из одной позиции устойчивого положения в другую происходит при некотором При величинах напряженHocTjH магнитного поля в плоскости пластины существует область в осях координат - ось абсцисс Ну и ось ординат Н, где //е - магнитное поле смещения, направленное антипараллельно намагниченности домена - в которой наблюдается продвижение магнитных доменов в канале (фиг. 1,в). Кривая 4, определяющая границу этой области в своей внутренней области, содержит совокупность точек, определяемых координатами (Н,см, Ну), при которых наблюдается продвижение магнитных доменов. В этой области из всей совокупности по оси Ясл, выбирается одна, равная Ясмр. называемая рабочей точкой. По оси Ну рабочая точка (р.т. на фиг. 1,в) лежит на линии Яел, Нсн,р и выбирается из условия ,- Где Яур - рабочая точка по оси Ну. Если рассмотреть совокупность точек Ну., соответствующих минимальному значению поля управления Яу, при котором наблюдается движение магнитных доменов в сторону, .заданную направлением вращения вектора Яу, в фазовой плоскости при фиксированном Яс(и Ясл1р, то годо-. граф 5 минимальных значений Яу отличен ОТ кругового (фиг. t,r). Это объясняется тем, что для создания необходимого потенциального рельефа, вызывающего перемещение магнитных доменов, в различных позициях устойчивого положения канала продвижения определяется различным значением , т. е. для движения от каждой определенной части аппликации к соседней
ребуется различное значение Ну,„ . Наприер, для преодоления зазоров между позииями устойчивого положении доменов III и IV или IV и V (фиг. 1,а) требуется боль1лее значение . чем для переходов магитного домена из гГозиции 1 в позицию II или из позиции 11 в позицию 111. На фиг. 1,г годограф 5 соответствует условному вращению Ну по часовой стрелке, а годограф б, показанный пунктирной линией - вращению против часовой стрелки.
При условии, когда амплитуда вектора ,ф вращающегося поля превышает максимальный из значений Ну„ годографа 5 (или 6), например, когда Wy //y, происходит движение магнитных доменов в канале продвижения (фиг. 1,д, годограф 7). При таком годографе поля движение домена опреде- ляется частотой вращения i магнитного поля Ну, а график движения показан на фиг. 1,е, где по оси абсцисс отложены промежутки времени t дискретностью 1/4 f, а по оси ординат номера позиций устойчиво- j го положения Л/,,. Точки на этом графике соответствуют позициям устойчивого положения Т-1-канала по фиг. 1,а, занимаемым магнитным доменом, считая, что при t 0 магнитный домен занимал позицию 1, а вращение вектора Ну происходит по часовой 2S стрелке (для определенности положим, что движение магнитного домена отслеживает конец вектора Ну.
Если годографу Ну придать вытянутую форму таким образом, что по всем направлениям годографа, кроме нап 2авления главной оси 8 (наибольшей оси) f yntin- ° направлению главной оси .в некотором угле В выполняется условие/Я)гв/ ytnin движения магнитных доменов по 35 каналу продвижения не будет. Такой вытянутый годог-раф 8 показан на фиг. 1,в. В этом случае магнитные домены переходят из позиции в позицию, соответствующую фазам, заключенным в растворе угла f (фиг. 1,ж). Если главная ось 9 годографа 8 вращается с частотой F относительно фазовой плоскости, то в зависимости от направления ее вращения магнитные домены перемещаются в ту или иную сторону. При вращении главной оси 9 по часовой стрел- 41 ке с частотой F f магнитные домены по каналу продвижения из Т-образных I и 1-образных 2 аппликаций (фиг. 1,а) перемещаются же сторону, что при вращении вектора Яу с частотой f по часовой стрелке для случая, показанного на фиг. 1,д и 1,е. График движения в осях (время t с дискретностью 1/4F, номера N позиций устойчивого положения по фиг. 1,а) по746723
казан на фиг. 1,3, считая, что магнитный домен находился при t 0 в позиции I, вращение главной оси 9 по часовой стрелке с частотой F, направление вращения вектора Яу произвольное, крестики на графике соответствуют номерам позиций, занимаемым магнитным доменом в канале продвижения (фиг. 1,а). Для сравнения на этом же графике (фиг. 1,з) показаны точками позиции, занимаемые магнитным доменом, если бы годограф соответствовал условию при частоте вращения по чатовой стрелке.
Использование предложенного способа управления перемещением магнитных доменов позволит сократить энергетические затраты, так как энергия пропорциональна площади внутри годографа, а для вытянутого годографа выполнение условия Я имеет меньшую площадь по сравнению с круговым.
Кроме того, обеспечивается возможность изменения скорости и направления продвижения магнитных доменов без изменения частоты вращения магнитного поля, что весьма удобно для резонансных систем, на частотах более 100 кГц. Практически настроенная в резонанс магнитная система, например, на 1 мГц без перестройки резонанса может быть использована для продвижения с частотой от долей Гц до десятков кГц, что сократит как временные, так и энергетические затраты на перестройку резонансной системы.
Формула изобретения
Способ управления продвижением цилиндрических магнитных доменов, основанный на создании в плоскости доменосодержащего материала результирующего переменного, например вращающегося магнитного поля, образованного суперпозицией составляющих магнитных полей, направленных под углом друг к другу с задержкой по фазе между собой, отличаю цымся тем, что, с целью расщирения области применения способа путем регулируемого . изменения скорости и направления движения цилиндрических магнитных доменов, амплитуду одного из составляющих магнитных полей модулируют с частотой, равной частоте модуляции фазы или частоты данного поля.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 399010, кл. G 11 С П/16, 1974.
2.Патент США № 3916396, кл. 340-174, 1975 (прототип).
S J Г Д Г
.Ну I Ну Ну T/V 1/7 Ну I-- 11 Iа
//CV
XJ
т.ж.л Нср- -/дат
ТГ ЕЗГЖ
1
г
diiAf
Hyuin Hyp
ЮТ
Г
| название | год | авторы | номер документа |
|---|---|---|---|
| Канал распространения цилиндрических магнитных доменов | 1977 |
|
SU741318A1 |
| Запоминающее устройство на магнитных доменах | 1976 |
|
SU640367A1 |
| Канал продвижения цилиндрических магнитных доменов | 1978 |
|
SU750558A1 |
| Канал для продвижения цилиндрических магнитных доменов | 1978 |
|
SU748507A1 |
| Запоминающее устройство | 1977 |
|
SU678535A1 |
| Магнитный регистр сдвига | 1976 |
|
SU583482A1 |
| Генератор цилиндрических магнитных доменов | 1977 |
|
SU720506A1 |
| Переключатель цилиндрических магнитных доменов | 1982 |
|
SU1034071A1 |
| Канал продвижения цилиндрическихМАгНиТНыХ дОМЕНОВ | 1979 |
|
SU809373A1 |
| Способ перемещения цилиндрических магнитных доменов из одного канала продвижения в другой | 1979 |
|
SU858099A1 |
Фиг- 2
