Устройство относится к контрольно измерительной технике и может быть использовано, в частности для измерения и контроля линейных перемещений подвижных объектов. Известно устройство для измерения линейных перемещений, содержащее два идентичных (основной и дополнительный) преобразователя, помещенных в одинаковые эксплоатационные условия и питающихся от общего источника напряжения переменного тока 1. Это устройство содержит также блок коррекции, на входы которого подаются сигналы обоих преобразователей и В котором осуществляется деление указанных сигналов с целью иск.пючения погрешностей, обусловленных изменением внешних условий работы (температуры и колебаний напряжения питания) , вследствие чего выходной сигнал устройства зависит практически лишь от контролируемого перемещения Однако вследствие некоторой неидентичностк условий, в которых на ходятся измерительные системы преоб разователей из-за значительного заз ра меаду ними, различного характера свяэи основного и дополнительного преобразователей с перемещающимся объектом (дополнительный не связан с ним), а также из-за некоторой неидентичности коэффициентов передачи обоих преобразователей, возникающей в процессе их изготовления, точность измерения перемещений известного устройства недостаточна, особенно в условиях значительных перепадов температур и изменений других дестабилизирующих факторов (напряжения питания). Наиболее близким техническим решением к изобретению является устройство для измерения линейных перемещений .2 , содержащее дифференциальный преобразователь перемещения (емкостного типа), управляемый источник питания преобразователя и измерительную схему для вьоделения разностного сигнала, подключенную к выходным зажимам преобразователя, блок сравнения, эталонный генератор, подключенный к одному из входов блока сравнения, ко второму входу которого подключен выход измерительной схемы, а выход блока сравнения подключен к управляющему входу источника питания, блок индикации перемещений, подключенный ко второму выходу измерительнЪй системы.
на котором формируется разностный сигнал обеих дифференциальных секций преобразователя, несущий информацию о контролируемом перемещении.
Благодаря охвату преобразователя контуром отрицательной обратной связи обеспечивается стабилизация входного тока питания преобразователя, а благодаря этому независимость результата измерения от колебаний напряжения и частоты источника питания и изменений других дестабилизирующих факторов, например диэлектрической проницаемости среды.
. «Однако точность измерения перемещений этим устройством отграничена нестабильностью коэффициента передачи выходной характеристики дифференци;ального преобразователя при значительных изменениях внешних условий работы (главным образом температуры).
Целью изобретения является повышение точности при изменении внешних условий работы.
Для достижения поставленной цели в предлагаемом устройстве дифференциальный преобразователь перемещения выполнен трансформаторным, его измерительная обмотка состоит из двух , идентичных, включенных встречно через регулируемый резистор с заземленным подвижным контактом, дифференциальных секций с линейно изменяющимся вдоль пути перемещения конТролируемого объекта числом витков в каждой, противоположные выводы обеих секций подключены к выходным зажимс1М преобразователя, блок индикации подключен между одним из выходных зажимов и общей шиной заземление, а дифференциальные секции измерительной обмотки смещены одна относительно другой на величину
0 б L 0,5 LJ
где d - коэффициент смещения секций; Ii - длина одной дифференциальной секции измерительной обмотки выраженная в единицах перемещения.
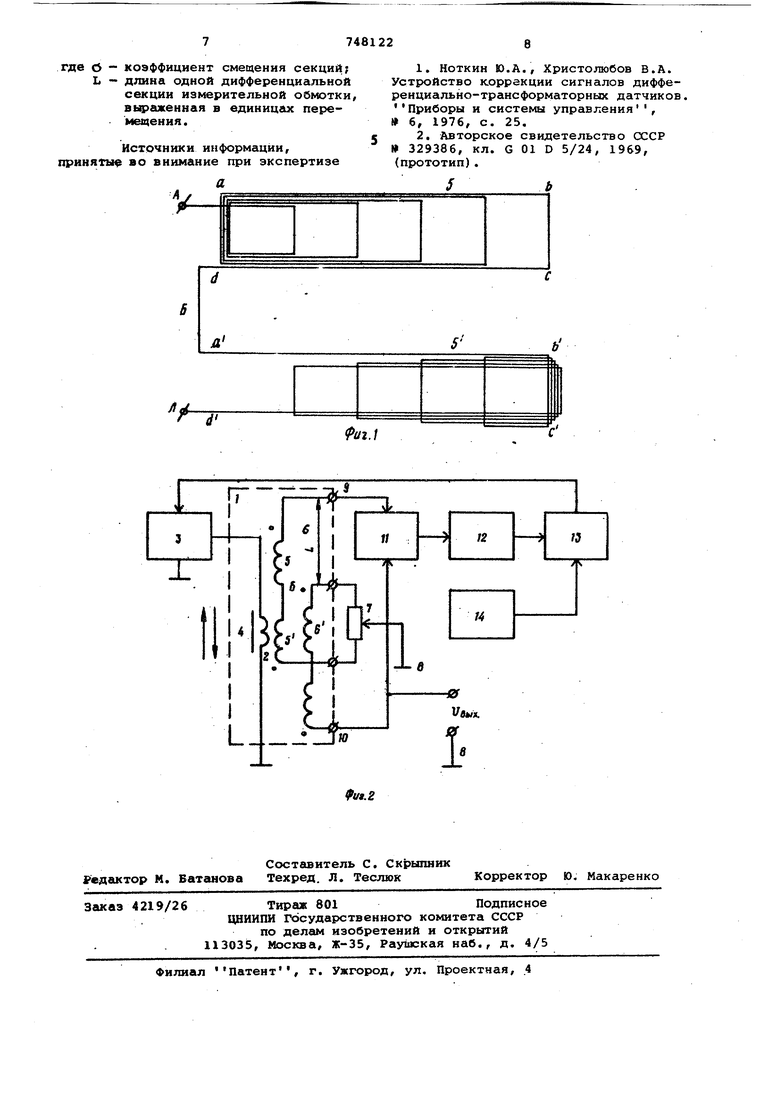
На фиг. 1 схематически изображена одна дифференциальная секция измерительной обмотки; на фиг. 2 - блоксхема устройства.
Уст зойство содержит дифференциально-трансформаторный преобразователь 1 перемещения, обмотка 2 возбуждения которого подключена к выходу управляемого источника 3 питания, а подвижн й. сердечник 4, на котором размещена эта обмотка, связывается с контролируемым объектом. Измерительная обмотка состоит из двух дифференциальных сек.ций 5-5 и 6-б , соединенных естречно через резистор 7, подвижный контакт которого подсоединен к общей шине 8 заземления. Противоположные выводы обеих секций подключены к выходным зажнмгии 9 и 10 преобразовател Блок индикации (на чертеже не показан) подключен между выходным зажимом 10 и шиной 8 заземления. Выходные зажимы 9 и 10 преобразователя присоединены к входам измерительной схемы 11, к выходу которой подключен выпрямитель 12. В блоке 13 сравнения сравниваются сигналы, снимаемые с выхода выпрямителя и эталонного генератора 14. Выход блока сравнения подключен к управляющему входу источника питания, вследствие чего преобразователь оказывается охваченным контуром стабилизирующей отрицатeльj oй обратной связи.
Устройство работает следующим образом.
При перемещении сердечника 4 с намотанной на нем обмоткой 2 возбуждения, создающей поток Ф возбуждения, в дефференциальных секОДях 5-5 и 6измерительной обмотки индуцируются напряжения 65-5 и-й,, пропорциональные разности пронизьваемых потоком возбуждения чисел витков, соответствующих половине дифференциальны секций обмотки. Эти напряжения, соответственно, равны
сЯОРп
WV X46Ll,(1)
.„О
(2),
и«-«, -2
W.,-, X - SX
-i
cSt
де Wyg
- удельные числа витков сзГ
в секциях измерительной обмотки, одинаковые для обеих секций, так как они выполнены идентично; X - измеряемое перемещение; (3 L - относительное смещение
дифференциальных секций, выраженное в единицах перемещения;
S - коэффициент передачи преобразователя, определяющий угол наклона его выходной статической характеристики.
Величина относительного смещения L секций выбирается в диапазоне от О до 0,5 L из соображений получения оптимального соотношения между погрешностью измерения и диапазоном измеряемого перемещения, которые уменьшаются с увеличениемс5 . Нижние значения коэффициента О смещения ограничены конечным значением порога чувствительности контура стабилизирующей отрицательной обратной связи. Коэффициент S смещения постоянен для данного преобразователя и представляет собой от .юшение разности числа пронизываемых потоком возбуждения витков соответствующих половин Обеих дифференциальных секций измерительной обмотни к общему числу витков, пронизываеых потоком возбуждения, обеих полоин какой-либо одной из секций, т.е.
U/ -UJ
в/1 Т /л
«л;. ,г где W-j - число пронизываемых потоком возбуждения витков од ной половины первой дифференциальной секции изме рительной обмотки; - число пронизываемых потоком возбуждения витков со ответеТВующей одной половины второй дифференциаль ной секции; - - число пронизываемых потоком возбуждения витков др гой половины первой диффе ренциальной секции; Wq ,, - ЧИСЛО пронизываемых пото ком возбуждения витков др гой половины второй диффе .ренциальной секции. Напряжения Ug.g и Ug.g. подаются на разные входы измерительной схемы 11, которая выделяет разностный сигнал, равный . „ .. ,-,. W .6L (3) 5-5 б-б d -Отскэда следует, что заданная стабильность коэффициента S передачи преобразователя может быть обеспечена путем поддержания постоянства разности напряжений -OJCPro и 5-5Ofl GL Поскольку Wyg const благодаря тому, что обе половины каждой дифференциальной секции с линейно изменяющимся числом витков на единицу длины расположены одна над другой так, что общее число витков на единицу длины обеих половин каждой секции неизменно, то в условиях значительного перепада температуры внешней окружающей среды, действия внешних магнитных полей и других дестабилизирующих воздействий нестабильным параметром ока.зьшается потокФ пвозбуждения преобразователя. Именно он определяет нестабильность коэффициента S передачи преобразователя,- а следовательно, и напряжения Ug-g, измеряемого блоком индикации перемещений, а также и раз ностью напряжений (65-5 -е-б выде ляемого измерительной схемой 11 (3). Поддержание указанного разностного напряжения неизменным обеспечивается с помощью замкнутого контура стабилизирующей отрицательной обратной связи, охватывающей преобразователь. Этот контур содержит измерительную схему для выделения разностного напряжения обеих секций, выпрямитель и блок сравнения этого разностного напряжения с опорным напряжением эталонного генератора. Резуль тат сравнения используется для управ ления источником питания преобразова теля, который может-быть выполнен, например, в виде регулируемого источ (4) ника напряжения, изменяющего (под воздействием управляю1дего сигнала) ток Oft в обмотке возбуждения прео бразователя, т.е. магнитный потокФ г, так, чтобы разностное напряжение (Ug-s- Ug-gO было постоянным при действии различных дестабилизирующих факторов. С помощью регулируемого резистора 7 компенсируется некоторая неидентичность секций измерительной обмотки преобразователя, возникающая в процессе их изготовления. Регулировкой этого резистора добиваются получения неизменного значения разностного напряжения (65-5 - Ug.gi) в крайних точках диапазона контролируемого перемещения. Таким образом, путем поддержания постоянства коэффициента передачи преобразователя перемещения (угла наклона выходной статической характеристики) достигается повышение точности измерения перемещений в уело-. ВИЯХ больших изменений внешних условий (температуры окружающей среды, напряжения возбуждения источника питания преобразователя, внешних магнитных полей и т.д.). Формула изобретения Устройство для измерения линейных перемещений, содержащее дифференциальный преобразователь перемещения, управляемый источник питания преобразователя, измерительную схему для выделения разностного сигнала, подключенную к выходным зажимам .преобразователя, блок сравнения, эталонный генератор, подключенный к одному из входов блока сравнения, ко второму входу которого подключен выход измерительной схемы, а выход блока сравнения подключен к управляющему входу источника питания, и блок индикации перемещений, отличающееся тем, что, с целью повышения точности при изменении внешних условий работы, дифференциальный преобразователь перемещения выполнен трансформаторным, его измерительная обмотка состоит из двух идентичных, включенных встречно через регулируемый резистор с заземленным подвижньм контактом, дифференциальных секций с линейно изменяющимся вдоль пути перемещения контролируемого объекта числом витков в каждой, противоположные выводы обеих секций подключены к выходным зажимам преобразователя, блок индикации подключен между одним из выходнЕлх зажимов и общей шиной заземления, а дифференциальные секции измерительной обмотки смещены одна относительно другой на величину L 0,5L/
где б - коэффициент смещения секций; L - длина одной дифференциальной секции измерительной обмотки, выргикенная в единицгис перемещения .
Источники информации, приняты во внимание при экспертизе
1.Ноткин Ю.А., Христолюбов В.А. Устройство коррекции сигналов дифференциально-трансформаторных датчиков. Приборы и системы управления ,
6, 1976, с. 25.
2,Авторское свидетельство СССР 329386, кл. G 01 D 5/24, 1969,
(прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2082076C1 |
| Трансформаторный датчик линейныхпЕРЕМЕщЕНий | 1979 |
|
SU823825A1 |
| ИЗМЕРИТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2163350C2 |
| Система стабилизации постоянных регулируемых токов для питания N независимых нагрузок | 1987 |
|
SU1524032A1 |
| Устройство для измерения удельной электропроводности | 1982 |
|
SU1070464A1 |
| Устройство для измерения перемещений | 1981 |
|
SU994906A1 |
| Способ коррекции выходного сигнала трансформаторного преобразователя | 1981 |
|
SU970084A1 |
| Функциональный преобразователь силы | 1978 |
|
SU787915A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2480710C2 |
| Устройство для измерения перемещений | 1978 |
|
SU848983A1 |
