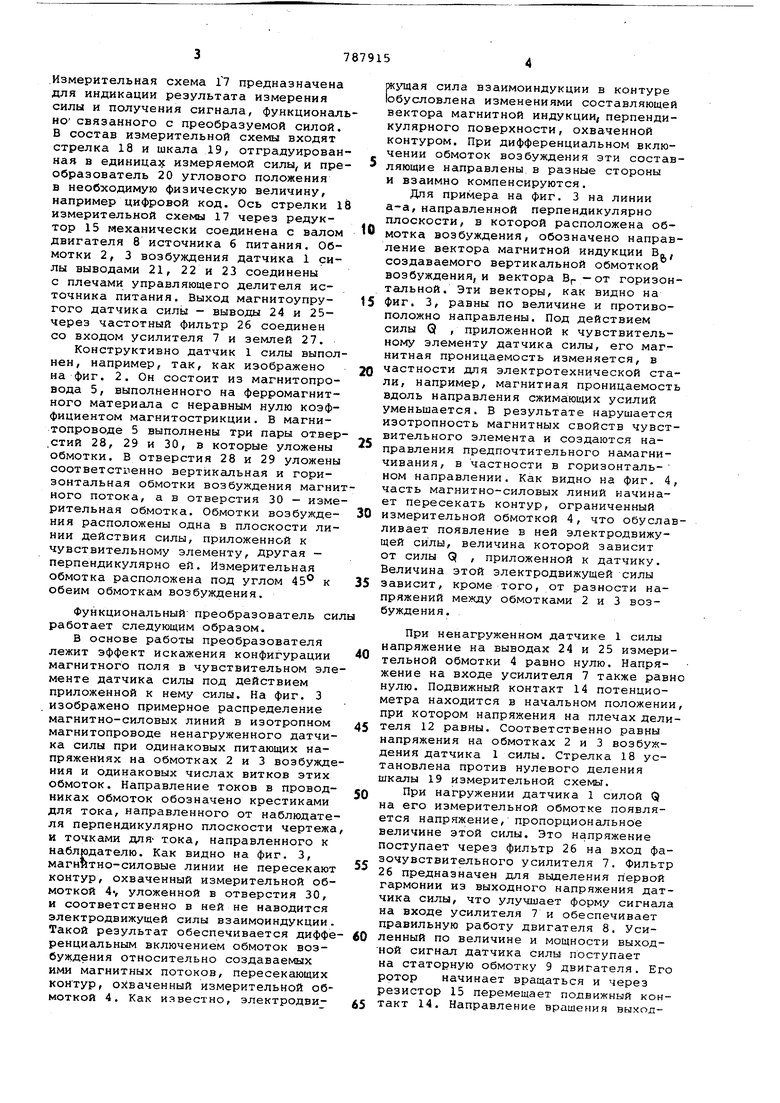
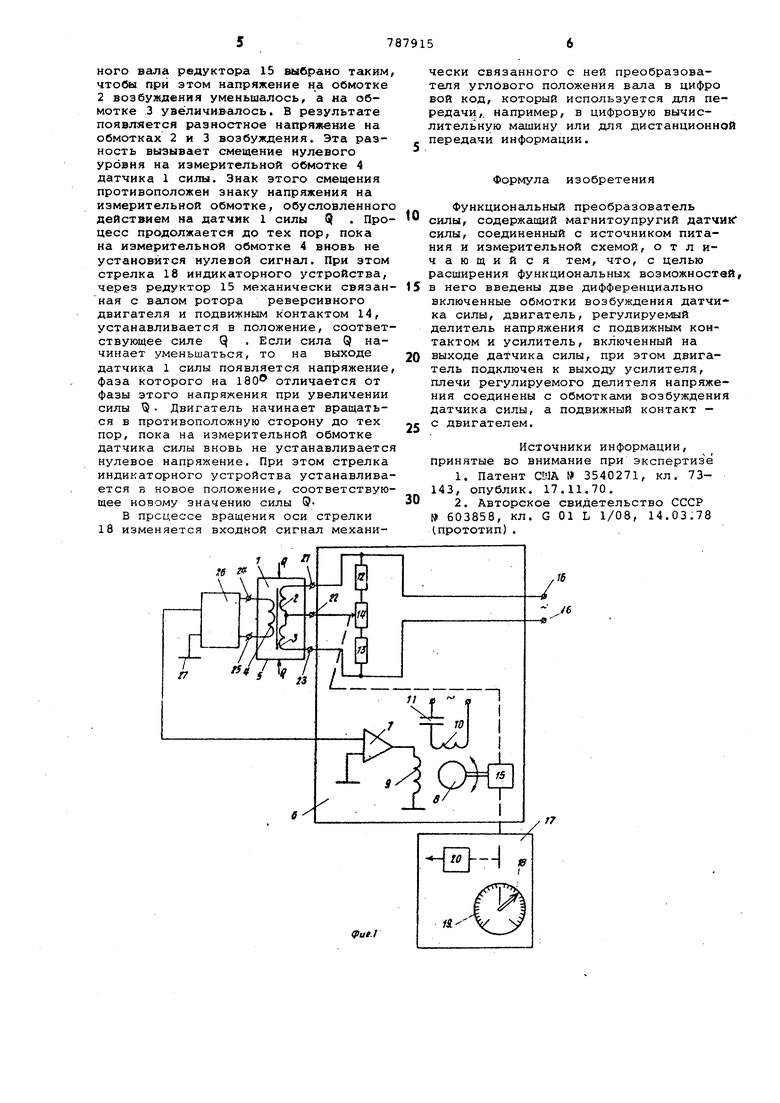
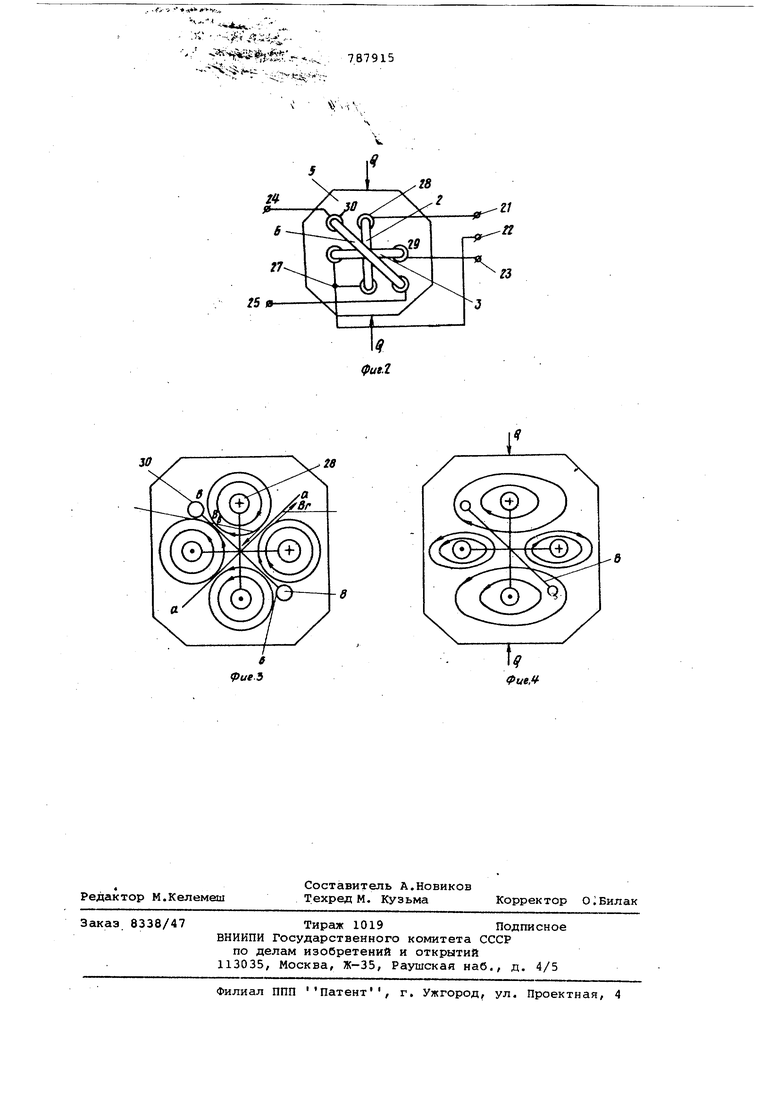
Изобретение относится к измерител ной технике и может быть использовано при измерении усилий. Известен функциональный преобра.зователь силы, содержащий магнитоупругий датчик силы, усилитель и измерительную схему 1. Однако данный преобразователь не позволяет получать различные функцио нальные зависимости. Наиболее близким по технической сущности к предлагаемому является функциональный преобразователь силы содержащий магнитоупругий датчик сил соединенный с источником питания и измерительной схемой, и индикаторный прибор 2. К недостаткам этого преобразователя силы относится ограниченная функционашьная возможность. Цель изобретения - расширение фун циональных возможностей. Указанная цель достигается за сче того, что в него введены две диффе.ренциально включенные обмотки возбуждения датчика силы, двигатель, ре гулируемый делитель напряжения с подвижным контактом и усилитель, вкл ченный на выходе датчика силы, при этом двигатель подключен к выходу усилителя, плечи регулируемого делителя напряжения соединены с обмотками возбуждения датчика силы, а подвижный контакт - с двигателем. - На фиг. 1 изображена электрическая схема предлагаемого функционального преобразователя силы; на фиг. 2 - конструкция магнитоупругого датчика силы на фиг. 3 и 4 - распределение магнитных потоков в магнитоупругом датчике силы ties нагрузки и с нагрузкой, соответственно. Магнитоупругий датчик 1 силы снабжен двумя дифференциально включенными обмотками 2, 3 возбуждения и измерительной обмоткой 4, расположенными на магнитопроводе 5. Источник 6 питания содержит фазочувствительный усилитель 7, реверсивный двигатель 8 со статорными обмотками 9,,10 и фазосдвигающим конденсатором 11 и регулируемый делитель 1-2 напряжения, включающий сопротивление 13 и подвижный контакт 14. Выход усилителя 7 подключен к статорной об метке 9 двигателя 8, вал ротора (не показан) которого через редуктор 15 соединен с подвижным контактом 14. Резисторы 12, 13 подключены к питающим выводам 16 источника 6 питания. .Измерительная схема Г7 предназначена для индикации результата измерения силы и получения сигнала, функциональ но связанного с преобразуемой силой. В состав измерительной схемы входят стрелка 18 и шкала 19, отградуирован ная в единицах измеряемой силы, и пре образователь 20 углового положения в необходимую физическую величину, например цифровой код. Ось стрелки 1 измерительной схемы 17 через редуктор 15 механически соединена с валом двигателя 8 источника 6 питания. Обмотки 2, 3 возбуждения датчика 1 силы выводами 21 г 22 и 23 соединены с плечами управляющего делителя источника питания. Выход магнитоупругого датчика сил1а1 - выводы 24 и 25- через частотный фильтр 26 соединен со входом усилителя 7 и землей 27. Конструктивно датчик 1 силы выпол нен, например, так, как изображено на фиг. 2. Он состоит из магнитопровода 5, выполненного на ферромагнитного материала с неравным нулю коэффициентом магнитострикции. В магнитопроводе 5 выполнены три пары отвер .стий 28, 29 и 30, в которые уложены обмотки, в отверстия 28 и 29 уложены соответственно вертикальная и горизонтальная обмотки возбуждения магни ного потока, а в отверстия 30 - изме рительная обмотка. Обмотки возбуждения расположены одна в плоскости линии действия силы, приложенной к чувствительному элементу, другая - перпендикулярно ей. Измерительная обмотка расположена под углом 45 к обеим обмоткам возбуждения. Функциональный преобразователь си работает следующим образом. В основе работы преобразователя лежит эффект искажения конфигурации магнитного поля в чувствительном эле менте датчика силы под действием приложенной к нему силы. На фиг. 3 изображено примерное распределение магнитно-силовых линий в изотропном магнитопроводе ненагруженного датчика силы при одинаковых питающих напряжениях на обмотках 2 и 3 возбужде ния и одинаковых числах витков этих обмоток. Направление токов в проводниках обмоток обозначено крестиками для тока, направленного от наблюдате ля перпендикулярно плоскости чертежа и точками ДЛЯ тока, направленного к наблюдателю. Как видно на фиг. 3, магнитно-силовые линии не пересекают контур, охваченный измерительной обмоткой 4, уложенной в отверстия 30, и соответственно в ней не наводится электродвижущей силы взаимоиндукции Такой результат обеспечивается дифф ренциальным включением обмоток возбуждения относительно создаваемых ими магнитных потоков, пересекающих контур, охваченный измерительной об моткой 4. Как известно, электродвик тдая сила взаимоиндукции в контуре обусловлена изменениями составляющей вектора магнитной индукции, перпендикулярного поверхности, охваченной контуром. При дифференциальном включении обмоток возбуждения эти составляющие направлены в разные стороны и взаимно компенсируются. Для примера на фиг, 3 на линии а-а, направленной перпендикулярно плоскости, в которой расположена обмотка возбуждения, обозначено направление вектора магнитной индукции В„, создаваемого вертикальной обмоткой возбуждения, и вектора Вр-от горизонтальной. Эти векторы, как видно на фиг. 3, равны по величине и противоположно направлены. Под действием силы Q , приложенной к чувствительному элементу датчика силы, его магнитная проницаемость изменяется, в частности для электротехнической стали, например, магнитная проницаемость вдоль направления сжимающих усилий уменьшается. В результате нарушается изотропность магнитных свойств чувствительного элемента и создаются направления предпочтительного намагничивания, в частности в горизонтальном направлении. Как видно на фиг. 4, часть магнитно-силовых линий начинает пересекать контур, ограниченный измерительной обмоткой 4, что обуславливает появление в ней электродвижущей силы, величина которой зависит от силы Q , приложенной к датчику. Величина этой электродвижущей силы зависит, кроме того, от разности напряжений между обмотками 2 и 3 возбуждения. , При ненагруженном датчике 1 силы напряжение на выводах 24 и 25 измерительной обмотки 4 равно нулю. Напряжение на входе усилителя 7 также равно нулю. Подвижный контакт 14 потенциометра находится в начальном положении, при котором напряжения на плечах делителя 12 равны. Соответственно равны напряжения на обмотках 2 и 3 возбуждения датчика 1 силы. Стрелка 18 установлена против нулевого деления шкалы 19 измерительной схемы. При нагружении датчика 1 силой О на его измерительной обмотке появляется напряжение, пропорциональное величине этой силы. Это напряжение поступает через фильтр 26 на вход фазочувствительного усилителя 7. Фильтр 26 предназначен для выделения первой гармонии из выходного напряжения датчика силы, что улучшает форму сигнала на входе усилителя 7 и обеспечивает правильную работу двигателя 8. Усиленный по величине и мощности выходной сигнал датчика силы поступает на статорную обмотку 9 двигателя, Его ротор начинает вращаться и через резистор 15 перемещает подвижный контакт 14. Направление врашемия выходного вала редуктора 15 выбрано таким, чтобы при этом напряжение на обмотке 2 возбуждения уменьшалось, а на обмотке 3 увеличивалось. В результате появляется разностное напряжение на обмотках 2 и 3 возбуждения. Эта разность вызывает смещение нулевого уровня на измерительной обмотке 4 датчика 1 силы. Знак этого смещения противоположен знаку напряжения на измерительной обмотке, обусловленного действием на датчик 1 силы Q . Процесс продолжается до тех пор, пока на измерительной обмотке 4 вновь не установится нулевой сигнал. При зтом стрелка 18 индикаторного устройства, через редуктор 15 механически связанная с валом ротора реверсивного двигателя и подвижным контактом 14, устанавливается в положение, соответствующее силе . Если сила Q начинает уменьшаться, то на выходе датчика 1 силы появляется напряжение, фаза которого на 180 отличается от фазы этого напряжения при увеличении силы Q Двигатель начинает вращаться в противоположную сторону до тех пор, пока на измерительной обмотке датчика силы вновь не устанавливается нулевое напряжение. При этом стрелка индикаторного устройства устанавливается в новое положение, соответствующее новому значению силы прсцессе вращения оси стрелки 18 изменяется входной сигнал механически связанного с ней преобразователя углового положения вала в цифро вой код, который используется для передачи,, например, в цифровую вычислительную машину или для дистанционной передачи информации.
Формула изобретения
Функциональный преобразователь силы, содержащий магнитоупругий датчик силы, соединенный с источником питания и измерительной схемой, отличающийся тем, что, с целью расширения функциональных возможностей, в него введены две дифференциально
включенные обмотки возбуждения датчика силы, двигатель, регулируемый делитель напряжения с подвижным контактом и усилитель, включенный на выходе датчика силы, при этом двигатель подключен к выходу усилителя, плечи регулируемого делителя напряжения соединены с обмотками возбуждения датчика силы, а подвижный контакт - с двигателем.
Источники информации, принятые во внимание при экспертизё
1.Патент СМА 3540271, кл. 73143, опублик. 17.11.70.
2.Авторское свидетельство СССР № 603858, кл. G 01 L 1/08, 14.03.78 (прототип).
16
У
:/«
Г7
:5v --, , , 787915
. ;- ;-vfc c,..
.
/
/50
11
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ В ТРУБОПРОВОДАХ, ВЫПОЛНЕННЫХ ИЗ ФЕРРОМАГНИТНОГО МАТЕРИАЛА | 2012 |
|
RU2490611C1 |
| Магнитоупругий датчик силы | 1980 |
|
SU1122907A1 |
| МАГНИТОУПРУГИЙ МАГНИТОИЗОТРОПНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2345336C1 |
| МАГНИТОУПРУГИЙ ДАТЧИК КРУТЯЩЕГО МОМЕНТА | 2001 |
|
RU2216000C2 |
| Способ определения остаточных напряжений при двухосном напряженном состоянии ферромагнитных изделий и устройство для его осуществления | 1988 |
|
SU1566234A1 |
| Устройство для мониторинга напряжённо-деформированного состояния металлоконструкций | 2020 |
|
RU2775396C2 |
| Магнитоупругий преобразователь крутя-щЕгО MOMEHTA | 1977 |
|
SU838448A1 |
| Индуктивный датчик положения | 1987 |
|
SU1415050A1 |
| СПОСОБ ПИТАНИЯ ЭЛЕКТРИЧЕСКИХ ПОТРЕБИТЕЛЕЙпостоянного ТОКА от | 1964 |
|
SU165225A1 |
| Бесконтактный датчик крутящего момента | 1977 |
|
SU708181A1 |
t
fue.V
