Цель изобретения - расширение ункциональных возможностей и повыение точности.
Поставленная цель достигается тем, то электромагнитное пола формируют утем создания двух полей, перемеающихся во взаимно противоположных аправлениях, и в соответствии с виом заданной функциональной зависиости управляют мгновенной скоростью вижения каждого из полей.
Частоту одного из -электромагнитных полей задают равной или кратной астоте второго электромагнитного поя Наложение двух перемещающихся встречно полей образует неподвижное в пространстве результирующее поле, на точность распределения которого практически не влияют погрешности конструктивного выполнения. В результате достижение необходимой точности преобразования не связано с проблемой размещения множества обмоток в ограниченных габаритах.
Управление частотой и мгновенной скоростью движения каждого из полей позволяет изменять точность и функциональную зависимость преобразования .
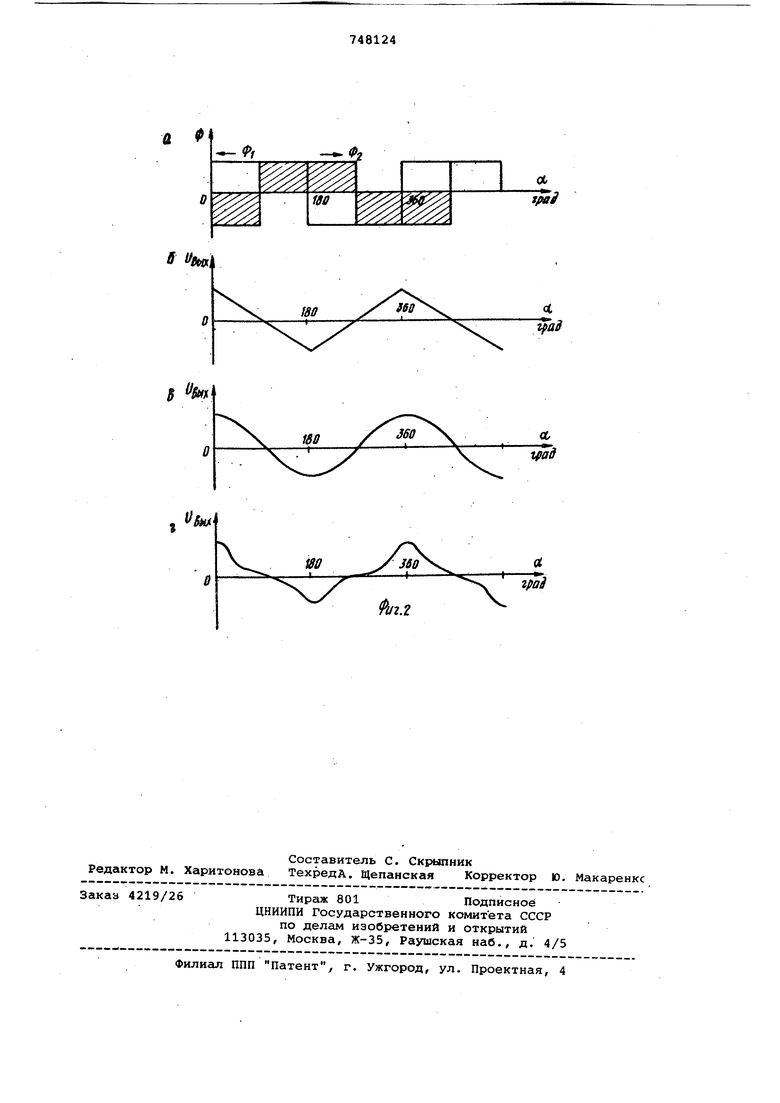
На фиг. 1 изображено устройство для преобразования угловых перемещений для осуществления описываемого способа, разрез магнитной системы, на фиг. 2 - эпюры распределениямягнитнык потоков в пространстве и зависимости выходных напряжений от угла поворота ротора.
Устройство для преобразования угловых перемещений, реализующее описываемый способ, имеет магнитную систему, состоящую из двух кольцевых магнитопроводов 1 и 2 с уложенными на них ортогональными обмотками 3-6, подключеннььми к источнику возбуяодения. Приэтом каждый из магнитных потоков, образующих электромагнитное поле, имеет, например, прямоугольную форму в функции угла сХ.
В качестве преобразователя мах- БИТНОЙ индукции может быть использован ротор 7 с обмоткой 8, размещенный внутри магнитопроводов 1 и 2 так, что его обмотка взаимодействует одновременно с обоими магнитными потоками.
Способ заключается в следукицим. Создают два вращающихся в противоположные стороны электромагнитных поля,
Результирующим полем, образованным двумя вращающимися магнитными потоками, воздействуют на преобразователь магнитной индукции, кинематически связанный с валом, угловое перемещение которого подлежит преобразованию.
Управляют частотой и мгновенной скоростью каждого из вращающихся электромагнитных полей, благодаря чему формируют заданное распределение результирующего поля, т.е. необходимую функциональную зависимость преобразования.
С преобразователя магнитной индукции снимают электрическое напряжение, действующее значение или амплитуда которого находится в заданной функциональной зависимости от углового перемещения (Л (фиг. 2).
Например, при одинаковых постоянных угловых скоростях и равных частях вращения потоков Ф и Ф результирующий магнитный поток оказывается пульсирующим и неподвижным в пространстве.. Вследствие прямоугольного распределения магнитного потока амплитуда или действующее значение напряжения, снимаемого с обмотки 8, имеет линейную зависимость от ухла поворота ротора 7, аналогично, линейному вращающемуся трансформатору.
Максимумы реализуемых функциональных зависимостей соответствуют совпадению векторов вращающихся потоков а число таких совпадений в пределах одного оборота - числу полюсов магнитной системы.
При равных частотах и переменных в пределах одного оборота угловых скоростях вращения потоков Ф и Ф получают нелинейные функциональные зависимости выходного напряжения от угла поворота. Создать такой режим вращения потоков Ф и Ф„ можно изменением амплитуд, и фазовых сдвигов напряжений возбуждения в обмотках 3 и 4,и 5 и 6. При неодинаковых, но кратных частотах вращения потоков Ф и Ф2/ результирующий магнитный поток имеет увеличенное число пар полюсов, т.е. в этом режиме осуществляется электрическая редукция преобразования, а следовательно, повышение чувствительности и точности преобразования.
Задавая разное соотношение частот вращения обоих электромагнитных .полей, получают преобразование с переменной электрической редукци.ей. Управление частотами вращения электромагнитных полей осуществляют изменением частот напряжений возбуждения.
Очевидно что приведенный пример конструктивного выполнения преобразователя не является единственным. Возможно также использование любой другой формы распределения исходных магнитных потоков, например, трапецеидальной или синусоидальной формы.
Реализация описываемого способа в случае преобразования линейных перемещений может быть осуществлена с помощью линейной магнитной системы при сохранении предложенных приемов управления режимом возбуждения магнитной системы. Точность преобразования зависит не от конструктивного исполнения обмоток, а от точности управления магнитными потоками. Поскольку управление осуществляется регулированием напряжений возбуждения то возможно получение высокостабильных режимов, т.е. высокой точности преобразования. Важным преимуществом способа явля ется его универсальность: без измене ния конструкции магнитной системы во можно получение разнообразных функциональных зависимостей. Формула изобретения 1. Способ функционального преобр зования механического перемещения объекта в электрическое напряжение, заключающийся в том, что формируют вдоль пути перемещения распределенное по заданному закону электромагнитное поле и воздействуют им на пре образователь магнитной индукции, свя занный с контролируемым объектом, .отличающийся тем, что, с целью расширения функциональных возможностей и повышения точности, электромагнитное поле формируют путем создания двух полей, перемещающихся во взаимно противоположных направлениях, и в соответствии с видом заданной функциональной зависимости управляют мгновенной скоростью движения каждого из полей. 2. Способ по п. 1, отличающийся тем, что частоту одного из электромагнитных полей задают равной или кратной частоте второго электромагнитного поля. Источники информации, принятые во внимание при экспертизе 1.Траксел Дж. Дж. Справочная книга по технике автоматического ре-гулирования. Госэнергоиздат, 1962. 2.Хрущев В.В. Электрические- машины переменного тока для устройств автоматики. Л., Энергия, 1969 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1998 |
|
RU2144254C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МГНОВЕННОЙ СКОРОСТИ ВРАЩЕНИЯ | 2002 |
|
RU2227304C2 |
| СПОСОБ БЕСПРОВОДНОЙ ПЕРЕДАЧИ, ПРИЁМА ИНФОРМАЦИИ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2013 |
|
RU2570651C2 |
| СПОСОБ БЕСПРОВОДНОЙ ПЕРЕДАЧИ, ПРИЕМА ИНФОРМАЦИИ | 2014 |
|
RU2598312C2 |
| Способ управления многофазным электродвигателем | 1977 |
|
SU736329A1 |
| СПОСОБ УМНОЖЕНИЯ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2592864C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Идентификатор магнитного состояния ротора гистерезисной машины | 1984 |
|
SU1545175A1 |
J
Фи2.1
ф
и
т
tffai
т
ct
Ь Sun
