(54) АКСЕЛЕРОМЕТР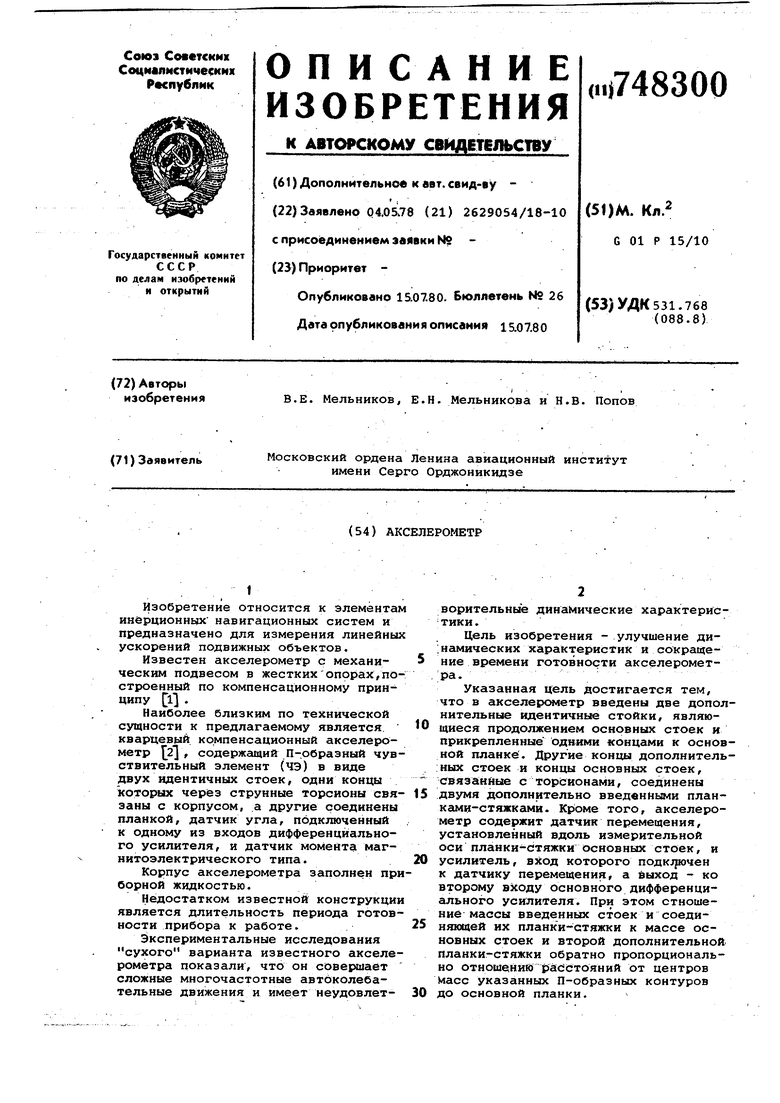
| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр | 1980 |
|
SU901915A1 |
| Компенсационный маятниковый акселерометр | 1985 |
|
SU1286902A1 |
| Способ контроля толщины металлизации кварцевого чувствительного элемента маятникового компенсационного акселерометра | 1989 |
|
SU1783447A1 |
| Акселерометр | 2022 |
|
RU2796125C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННОГО КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 2013 |
|
RU2533752C1 |
| Акселерометр | 1987 |
|
SU1478826A1 |
| СПУТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2627014C1 |
| АКСЕЛЕРОМЕТР | 1983 |
|
RU2046345C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ СТРУННЫЙ АКСЕЛЕРОМЕТР И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2004 |
|
RU2258230C1 |
| Чувствительный элемент микромеханического акселерометра | 2021 |
|
RU2773069C1 |
, Изобретение относится к элемента инерционных навигационных систем и предназначено для измерения линейны ускорений подвижных объектов. Известен акселерометр с механическим подвесом в жесткихопорах,по строенный по компенсационному принципу 1 . Наиболее близким по технической сущности к предлагаемому является кварцевый компенсационный акселерометр 2, содержащий П-образный чув ствительный элемент (ЧЭ) в виде двух идентичных стоек, одни концы которых через струнные торсионы свя заны с корпусом, а другие соединены планкой, датчик угла, подключенный к одному из входов дифференциального усилителя, и датчик момента магнитоэлектрического типа. Корпус акселерометра заполнен пр борной жидкостью. Недостатком известной конструкци является длительность периода готов ности прибора к работе. Экспериментальные исследования сухого варианта известного акселе рометра показали , что он совершает сложные многочастотные автоколебательные движения и имеет неудовлетворительйые динамические характеристики. Цель изобретения - улучшение ди;намических характеристик и сокращение времени готовности акселерометра. . Указанная цель достигается тем, что в акселерометр введены две дополнительные идентичные стойки, являющиеся продолжением основных стоек и прикрепленные одними концс1ми к основной планке . Другие концы дополнитель:ных стоек и концы основных стоек, связа:нные с торсионами, соед инены двумя дополнительно введенными планками-стяжками. Кроме того, акселерометр содержит датчик перемещения, установленный вдоль измерительной оси планки-стяжки основных стоек, и усилитель, вход которого пoдкJpoчeн к датчику перемещения, а выход - ко второму входу основного дифференциального усилителя. При этом отношение массы введенньос стоек и соединяющей их планки-стяжки к массе основных стоек и второй дополнительной Планки-стяжки обратно пропорционально отношению {расстояний от центров Масс указанных П-образных контуров до основной планки.
Предлагаемые конструкции акселерометра и его ЧЭ прзйоляют уйЪли ить жёсткость, разгрузить подвес и уменьшить прогибторсиона вдоль измерительной оси. Путем,введения в структурную схему акселерометра дополнительного параллельного KaHajia, состоящего из датчика перемещения и усилителя, обеспечивают измерение и компенсаци 0 в основном контуре составляющей плоскопараллельного движения рамки вдоль измерительной оси, а значит, исключение автоколебаний система. - - На фиг. 1 представлен ЧЭ предложенного кварцевого акселерометра;на фиг. 2, 3 - конструктивная и структурная схемы акселерометра.
Кварцевый маятниковый ЧЭсодержит планку 1 на стойках 2, подвешенную на растянутых кварцевых струнах 3, концы которых жестко прикреплены, с одной стороны, к концйм стоек 2, с другой - к корпусу 4. Поверхность кварцевых струн 3, стоек 2 и планки 1 металлизирована. На планке закреплены дополнительные стойки 5, б, соединенные планкой-стяжкой 7, а концы стоек 2 соеди нены планкой-стяжкой 8. Элементы 1,2,6-8 маятника образуют жесткую плоскую фйгуру маятниковый ЧЭ, причем планка-стяжка 8 расположена на оси подвеса маятника, совпадающей с осью струн 3 в недефорМйрованнрм состоянии.
Геометрию и массу стоек 5, б и планки-стяжки 7 выбирают по отноше-, НИИ к геометрии и массе стоек 2 и планки-стяжки 8 таким образом, чтобы отношение их масс было обратно пропорционально расстоя«иям от центров масс указанных элементов до оси планки 1.
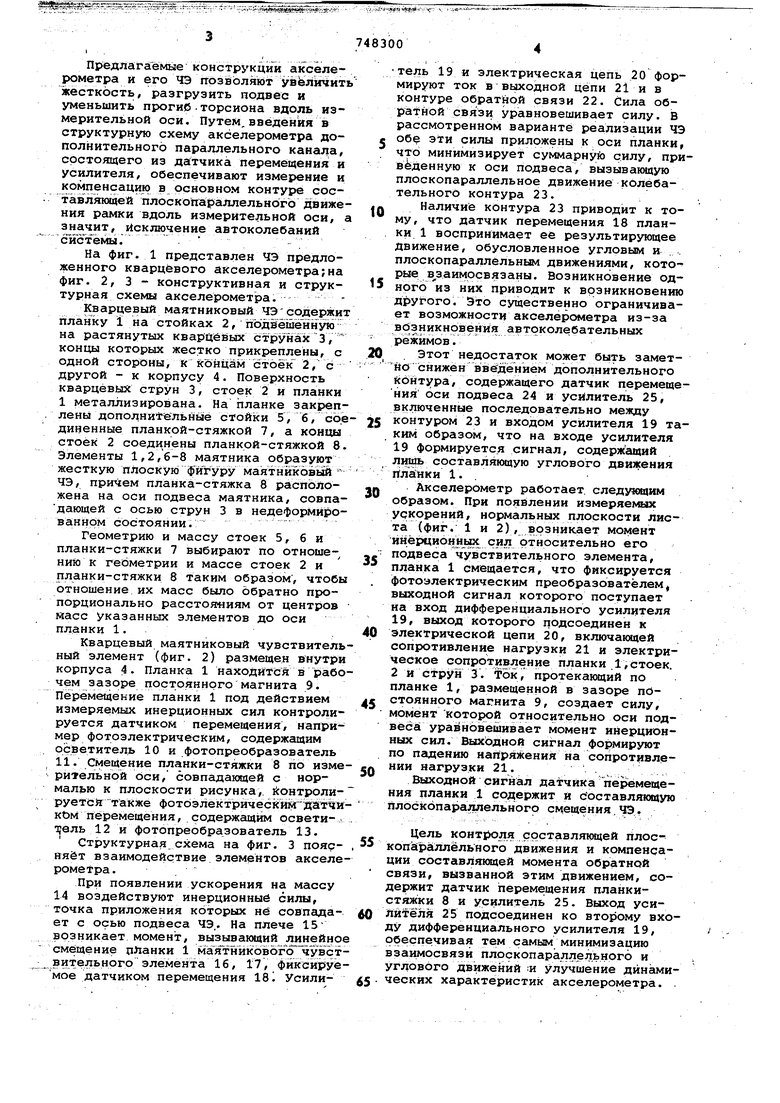
Кварцевый маятниковый чувствительный элемент (фиг. 2) размещен внутри корпуса 4. Планка 1 находится в рабочем зазоре постоянного магнита 9. Перемещение планки 1 под действием измеряемых инерционных сил контролируется датчиком перемещения, например фотоэлектрическим, содержащим осветитель 10 и фотопреобразователь 11. Смещение планки-стяжки 8 по измерительной оси, совпадающей с нормалью к плоскости рисунка, йонтролируетсй также фот6электрйчесКйМ ДйтчикЬМ перемещения, содержащим осветит;ель 12 и фотопреобразователь 13.
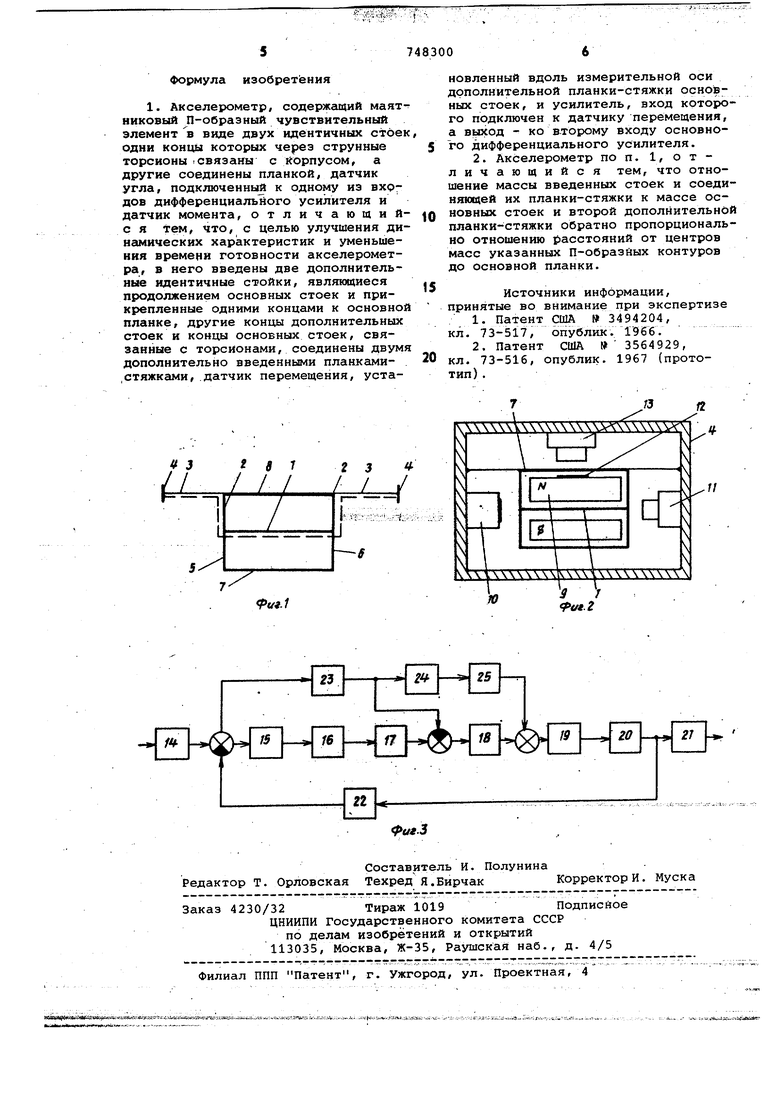
Структурная,схема на фиг. 3 поясняёт взаимодействие элементов акселерометра.
При появлении ускорения на массу 14 воздействуют инерционные силы, точка приложения которых не совпадает с осью подвеса ЧЭ.. На плече 15 возникает момент, вызывающий линейно смещение пЛанки 1 ма 51Тнйк6в6гЪ чувЪтвительного элемента 16, 17, фиксируемое датчиком перемещения 18. Усили748300
тель 19 и электрическая цепь 20 формируют ток в выходной цепи 21 и в контуре обратной связи 22. Сила обратной связи уравновешивает силу. В рассмотренном варианте реализации ЧЭ обе эти силы приложены к оси планки, что минимизирует суммарную силу, прив4денную к оси подвеса, вызывающую плоскопараллельное движение колебательного контура 23.
Наличие контура 23 приводит к тому, что датчик перемещения 18 планки 1 воспринимает ее результирующее движение, обусловленное угловым и плоскопараллельным движениями, которые взаимосвязаны. Возникновение одного из них приводит к возникновению другого. Это существенно ограничивает возможности акселерометра из-за всззникновения автоколебательных режимов.
Этот недостаток может быть заметйо снижен ввбГдёнием дополнительного койтура, содержащего датчик перемещения оси подвеса 24 и усилитель 25, включенные последовательно между контуром 23 и входом усилителя 19 таким образом, что на входе усилителя 19 формируется сигнал, содержащий лишь составляющую углового движения п(ла(нки 1. .
Акселерометр работает, следуаддим образом. При появлении измеряемых ускорений, нормальных плоскости листа (фиг. 1 и 2), возникает момент инёрцио1|ных сил относительно его подвеса чувствительного элемента, планка 1 смещается, что фиксируется фотоэлектрическим преобразователем выходной сигнал которого поступает на вход дифференциального усилителя 19, выход которого подсоединен к электрической цепи 20, включакадей сопротивление нагрузки 21 и электрическое сопротивление планки 1,стоек. 2 и струн 3. Ток, протекающий по планке 1, размещенной в зазоре постоянного магнита 9, создает силу, момент которой относительно оси подвеса уравнЬвешивает момент инерционных сил. ВыхЬд ной сигнал формируют по падению напряжения на сопротивлении нагрузки 21.,
Выходной сигнал датчика перемещения планки 1 содержит и доставляющую плоскопараллельного смещения.ЧЭ.
Цель контрол.я составляющей плоскопараллёльного движения и компенсации составляняцей момента обратной связи, вызванной этим движением, содержит датчик перемещения планкистяжки 8 и усилитель 25. Выход усилйтёля 25 подсоединен ко второму входу дифференциального усилителя 19, обеспечивая тем самым минимизацию взаимосвязи плоскопараллельного и углового движений :и улучшение динамических характеристик акселерометра.
Формула изобретения
новленный вдоль измерительной оси дополнительной планки-стяжки основных стоек, и усилитель, вход которого подключен к датчику перемещения, а выход - ко второму входу основного дифференциального усилителя.
0 планки-стяжки обратно пропорционально отношению расстояний от центров масс указанных П-образйых контуров до основной планки.
5
Источники информации, принятые во внимание при экспертизе
0 кл. 73-516, опублик. 1967 (прототип) .
/J
fit
1
л/
С
.
Ч
1 /
Л
.Z
