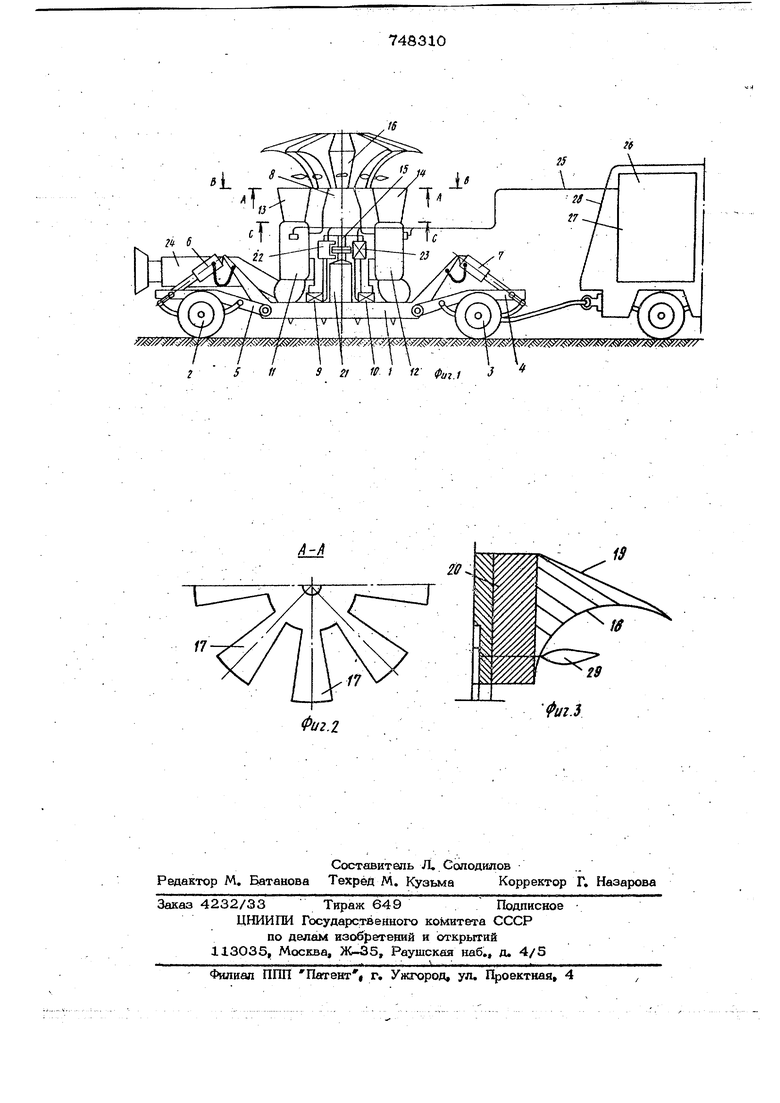
Изобретение относится к геофизическГим приборам, а именно к вибраторам для сей смически-х исследований, включая глубинное сейсмическое зондирование. Физический принцип работы известньк вибраторов основан на, преобразовании тепловой или электрической энергии в механические колебания путем вращения неслабансированнык масс, таких, как эксцентрик, или путем разгона с переменным ускорением больших масс.. При этом двинсущая сила, под действие)м которой с пере менным во времени ускорениём-раэгоняется масса, создается электродинамическим или гидродинамическим способами. Так, например, известная сейсмическая вибрационная система fl устанавливается на раме автомобиля, содержит два двухходовых рабочих цилиндра, которые с одного конца шарнирно закреплены на раме, а с другого конца зафиксированы в поперечире. Нижняя часть вибратора имеет плиту, устанавливаемую на земле под подъИуЩЬЬми цилиндрами, которые изолированы суг вибраторов и основания во время работы устройства. В процессе вибровоздействия машин от вибраторов изолируется воздушными амортизаторами. Известен другой сейсмический источник 23 возбуждающий сейсмический сигнал посредством вибрации инерционной массы, обладающей настраиваемым резонансом в диапазонов генерируемых частот. Однако известным вйьраторам присущ общий существенный недостаток: значительная металлоемкость, громоздкость, следствием чего является низкая мобильгность, подвижность, что затрудняет использование таких вибраторов на местности со сложным рельефом, в условиях беодорожья. Другим существенным недостатком иэвестных вибраторов является узкий частотнь1й диапазон, что ограничивает возможность согласования выходного импеданса вибратора с волновым сопротивлением породы, в которой происходит возбуждение , упругих колебаний, так как волновое сопрсхги; пение верх нал ежаших пластов пород, выходящих на дневную поверхность, зависит от И.Х плотности, которая колеблется для различных районов в щироких пре™ деэтах, К существенным недостаткам известных устройств следует отнести и то, что из-за больших инертных масс с их помощью сложно генерировать амгшитудно-модулированные или частотно-модулированны механйческие колебания, что ограничивает возможную область использования известных вибраторов. Наличие больших масс. Подвергаемых разгону, затягивает во времени переходный процесс при формировании переднего и заднего фронггов колебаний, что значительно затрудняет получение группы импульсов, это ограничивает возможности применения известных вибраторов при глубинном зондировании земной коры. Наиболее близким по технической сущности к изобретению является вибратор , для сейсмических исследований содержащий платформу с убирающимися шасси, на станине которой диаметралыю противоположно соплами вверх расположены решетив ные двигатели и блок управления работой реактивных двйгат.елей, смоигированный н тягаче з . Модулирование реактивной силы двигателя осуществляется ползунком периодически по гармоническому закону, перекрьшающим сечение канала горючей смеси, а для увеличения реактивной,.силы червячный вал сообщает продольные перемещения поршипо, вдавливающему сыпучий материал в раструб сопла двигателя, шаг резьбы которого, изменяется также по гармоническому закону. Существенным недост атком такого известного реактивного возбудителя гармонических упругих колебаний является узкий рабочий диапазон модуляции реактивной силы за счет нарушения устойчивости горения в камерах сгорания двигателя и невозможность генерирования более высоких частот по сравнению с инерционнылот вибраторами, что все вместе исключает возможность согласования волнового кмпеданса такого устройства с волновым сопротивлением почьы. Увеличение же реактивной силы за счет вдавливания в сопло негорючих сыпучих компонентов практически неэффективно,так как в силу несоизмеримой разнады между скоростью истечения газов (бйлёе 1ООО м/с) и скоростью вдавливания сыпучего материала (меньше метра в секунду) сьшучий материал в основном тонк;им сяоем истекает вдоль стеики сопла, в .то время как основная площадь сопла не подвергается возмущающему воздействшо вдавливаемого сыпучего материала, что не обеспечивает повышения эффективности модуляции тяги, а только усложняет конструкцию и приводит к быстрому износу за счет абразивных свойств стенок сопла. Отсутствуют элементы оптимального регулирования что исключает возможнос-гь синхронизации одновременной работы нескольких вибраторов при формировании направленного виброизлучений, что имеет важное значение для глубинного сейсмического зон-, дирования. Целью изобретения является побьпиение мобильности, компактности, снижение веса при значительном увеличении полезной мощности; значительное расширений частотного диапазона работы; расширение возможности генерирования различных {AM, Ч АЛ ) видов колебаний; значительное повышение устойчивости работы в широких диапазонах модуляции реактивной силы таги. Цель достигается тем, что в предпагаемом вибраторе в станине, связанной с рамой посредством преобразователей силы, параллельно осям сопал смонтирован вал, снабженный в верхней части управляемым многолопастным откпонителем га- зового потока, расположенным над соплами, нижний конец вала соединен с управляемым приводом. Причем реактивные двигатали снабжены вьщвижным телескопическим воздухозаборником, а преобразователи силы, мнрголопастнрй отклонитель линией связи соединены с блоком управления, Управляемый привод выполнен в виде электродвигателя, муфта которого снабжена управляемым тормозом и преобразователем оборотов. Многолопастной отклонитель дополнительно снабжен регулируемыми лопатками. .На фиг. 1 показан опйсьшаемый для. сейсмических.исследований общий вид; на фиг. 2 - вид сниёумноголопастного отклонителя; на фиг. 3 - сечение лопасти многолопастного отклонителя. Вибратор для сейсмических исследовагий состоит из платформы 1, снабженной вьщвижными шасси (колесами) 2 и 3, связанными с ней посредством рам 4 и 5, и гидравлическими приводами 6 н 7. В центральной части платформы I смонтирована станина 8. Между основанием станины 8 и платформой 1 установлены: преобразователи 9 и Ю силы. На станине 8 диаметрально противоположно подвешены реактивные двигатели Ни 12, сопла 13 и 14 ксугорык направлены вертикально вверх. Проходнь1е каналы сопел 13 и 14 вьтопнены с переменным геометрическим сечедаем, В центральной части станины 8смонтирован вертикально вал 15, на верхний конец которого жестко насажен управляемый многолопастной отклонитепь 16 газового потока. Лопасти 17 (фиг. 2) ртклонитепя 16 выполнены в виде (фиг. 3 направляющих криволинейных поверхностей 18, плоскости которых ориентированы навстречу газовому потоку и посредством ребер 19 жесткости прочно соединены со ступицей 20. Нижний конец вала 15 посредством муфты соединен с валом привода 21, Муфта вала 15 снабжена управляемым тормозом 22 и преобразователем 23 оборотов. Реактивные двигатели 11 и 12 снабжены вьщвижным телескопическим воздухозаборником 24, Преобразователи 9и 10 силы и преобразователи 23 оборотов, гидравлические приводы 6 и 7 и реактивные двигатели 11 и 12 линией 25 связи соединены с блоком 26 управления работой реактивнык двигателей и блоком 27 управления приводом лопас1 ного отклонителя потока, которые смонтированы в кузове тягача 28. Лопасти 17 отклонителя 16 смонтированы на ступице 20, жестко насаженной на вал 15. Направляющая поверхность 18 лопасти снабжена ребрами 19 жесткости, посредством которых связана со ступицей 20. Каждая лопасть 17 отклонителя 16 в зоне действия потока газа дополнительно снабжена регулируемыми малыми лопатками 29 (фиг. 3), которые частично преобразуют часть энергии потока газов в крутящий момент. Вибратор для сейсмических исследований работает следующим образом. Платформа 1 посредством гидравличе ских приводов 6 и .7 командой блока 26 управления опускается на участок повёрхнос ти почвы, подлежащей вибровоздействию. Выдвигается телескопический воздухозаборник 24 и запускаются реактивные двигатели Ни 12. После вывода реактивных двигателей 11 и 12 на рабочий режим растормаживается вал привода 21 тормозом 22 и осуществляется запуск привода 21. Контроль и регулирование оборотов вала привода 21 осуществляются соответственно преобразователем 23 оборотов блоком управления работой рёактивных двигателей и приводом лопастного отклонителя потока, например, путем регу7106 .лирования частотой тока и уровнем питающего напряжения на обмотках электрического двигателя. При вращении вала 15 лопастного . клонителя 16 газового потока лопасти 17 периодически с частотой i-n-m, где Y -. число оборотов в секунду aa/ia привода {отклонителя, 171 - число лопастей отклонителя, безударно отклоняют газовый поток с выхода сопел 13 И 14 реактивных двигателей 11 и 12, при;; этом изменяется направление реактивной тяги с вертикального на горизонтальное, а так как газовые потоки одновременно отклоняются в Противоположные стороны, то силы, развиваемые ими/ взаимно компенсируются, в результате чего с частотой f происходит модуляция в вертикальном направлении реактивной силы. Балансировка реактивной тяги, раэвиваемой каждым реактивным двигателем, осуществляется блоком 26 управлетгая по информации, поступающей от преобразователей 9 и 10 силы. Так,как реактивные двигатели 11 и 12 позволяют осущест впять необходимую модуляцию реактивной тяги за счет регулирования режима их работы, ТО синхронно во времени частично модулируется с частотой реактивная тяга, что повышает коэффициент полезного действия. Через некоторое время -Ь , большее периода между импульсами, привод 21 обесточивается, и вал 15 быстро ос танавливается тормозом 22, Дпя снижения мощности привода 21, улучшения динамики торможения вала 15 часть энергии газового потока преобразуется в крутящий момент, Который регулируе1ся по величине и направлению путем поворота регулирующих малых лопаток 29, Угол наклона мальк лопаток при вращении обеспечивает дополнительный момент, совпадающий по направлению с моМ31ГГОМ привода 21, а при торможении угол изменяется так, что знак MOMeirra меняете на противоположный, что уменьшает время торможения. Таким образом, формируется группа колебаний. В случае необходимости привод 21 вновь запускается с последующей бытрой остановкой, тогда происходит перидическое формирование целого ряда групп олебаний, При работе реактивных двигателей 11 12 чистый воздух к ним подводится по ыдвижному воздухозаборнику 24,
77483
Ьонтроль и управление работой привода 21 лопастного отклониталя 16 осуществляются блоком 27 управления лопастного отклонителя, который формирует необходимый режим работы элёктродвига- s теля. Таким образом, в диапазоне 0-500 Гц с амплитудой 20-50 тонн происходит модуляция реактивной тяги при вибровоэдействии на участок почвы,
Применение вькоднык сопе.п 13 и 14 с переменным проходным сечением (, с сужением и.х на выходе) позволяет увеличивать количество лопастей 17, что расширяет частотный диапазон, Выполне- 15 ние направляюищх поверхностей и ребер 19 жёсткости лопастей 17с ориентацией . в плоскости вращения обеспечивает легкость и минимальные потери энергии при И.Х вращении. Синхронное управрение ра- 2о ботрй нескольких вибраторов позволит формировать направленный вибропуч большой интенсивности,
Изменяя частоту тока и амплитуду нагьряжения на обмотках привода 21, можно 25 формировать суммарную реактивную силу тяги реализуя частотную или амплитудную модуляцию, что значительно расширяет возможности вибратора при согласовайий 9ГО импеданса в вслновыч сопротивлениях 30 пород. Высокая компактность реактивньгх двигателей 11 и 12 при вьюокой удеяьной мощности обеспечивает мобильные характеристики вибратора. Применение вибратора позволит без нарушения земной 35 поверхности проводить глубинное сейсмозондирование недр. Формула изобр етения
Вибратор для сейсмических исследований, содержащий платформу с убирающи- 40
8
мися шасси, на станине которой диаметрально противоположно соплами вверх расположены реактивные двигатели в блок управления работой реактивных, двигателей смонтированный на тягаче, отличающийся тем, что, с целью расширения частотного диапазона и типов модуляции возбуждаемых сигналов, повышения надежности и устойчивости работы, в станине, связанной с платформой посредством преобразователей силы, параллельно осям сопел смонтирован вал, снабженный в верхней части управляемым многопопаст ным ртклонятедем газового потока, расположбнньш над соплами, а нижний конец вала соединен с управляемым приводом, причем реактивные двигатели снабжены выдвижным телескопическим воздухоза- . борником, а преобразователи силы, мно голопастной отклонитель линией связи соединены с блоком управления.
2.Вибратор по р. 1, о т л и ч а ю щ и и с я тем, что управляемый привод выполнен в виде, электродвигателя, муф та которого снабжена управляемым тормозом и преобразователем оборотов.
3.Вибратор по п. 1, о т л и ч а ющ и и с я тем, что многолопастной от клонитель дополнитапьно снабжен регулируемыми лопатками.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 3777843, кл. 181-0.5, опублик, 1973,
2.Патент США № 3578102, кл, 181-0,5, бпубликг 1973.
3.Авторское свидетельство СССР N9 172066, кл. q 01V 1/04, 1965 (прототип).
Фи2.г Фиг.З
