Изобретение относится к средствам военной техники и может быть применено в конструкции противолодочных ракетных комплексов, использующих беспилотные винтовентиляторные самолеты-вертолеты с двухвинтовой продольно-несущей и движительно-рулевой системами, включающими с противоположным вращением два несущих винта (НВ), обеспечивающих вертикальный и короткий взлет/посадку (ВВП и КВП), и конвертируемый турбореактивный двухконтурный двигатель для высокоскоростного полета в конфигурации самолета с дополнительными кормовыми канальными винтовентиляторами по бокам мотогондолы при уложенных вдоль оси симметрии лопастей однолопастных НВ в соответствующие ниши верхней части фюзеляжа, имеющего в бомбоотсеке авиационные противолодочные ракеты, и трансформируемыми после их посадки на корабельную площадку посредством складывания лопастей НВ во внутрь фюзеляжа и на него внешних секций крыла в стояночную конфигурацию для его перевозки в ангаре на ложементе заправляющей топливом и заряжающей боекомплектом станции автономного надводно-подводного авианесущего корабля.
Известен палубный самолет вертикального взлета и посадки (СВВП) проекта XV-2 корпорации Sikorsky (США), имеющий высокорасположенное крыло, останавливаемый и убираемый в верхнюю часть фюзеляжа однолопастной несущий винт с противовесом, снабженным реактивным соплом, струйной системой и воздуховодом от турбореактивного двигателя (ТРД) силовой установки (СУ), содержит подкрыльное хвостовое оперение и трехопорное убирающееся колесное шасси.
Признаки, совпадающие - наличие ниши в верхней части фюзеляжа с НВ, создающим только вертикальную тягу, имеющим струйную систему с воздуховодом, проложенным внутри колонки вала НВ и обеспечивающим равномерный отбор мощности ТРД, воздух которого, направляясь к реактивному соплу НВ, будет его вращать и создавать подъемную силу. Особенностью конструкции СВВП проекта XV-2 - концепция Control Circulation Rotor (CCR), т.е. ротор с регулируемой циркуляцией и неподвижное его размещение в фюзеляже: при переходе в самолетный режим полета останавливался однолопастной НВ, имеющий узлы складывания колонки вала и фиксирования лопасти, которые укладывались по оси симметрии в нишу фюзеляжа.
Причины, препятствующие поставленной задаче: первая - это то, что размещение на верхней части фюзеляжа останавливаемого и убираемого НВ, имеющего автомат перекоса его лопасти с управлением его общего и циклического изменения его шага, что предопределяет конструктивно сложную складываемую колонку его вала и противовес с воздуховодами, что усложняет конструкцию и уменьшает надежность, но и значительно увеличивает габаритные размеры по высоте с вращающимся НВ. Вторая - это то, что диаметр НВ ограничен длиной фюзеляжа и как, следствие, при висении поток от НВ, обдувая консоли крыла и создавая значительную общую потерю (≈34%) в вертикальной их тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги НВ и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что однодвигательная СУ включает ТРД избыточной мощности, используемой при выполнении ВВП на 100%, что весьма снижает наработку на отказ и надежность, особенно, при его отказе, а расположение под дельтовидным крылом вертикальных килей, имеющих на их законцовках обтекатели с задними колесами шасси, что предопределяет, повышая аэродинамическое сопротивление, ограничения в достижении скорости до 745 км/ч. Все это также ограничивает возможность уменьшения массы конструкции планера с однолопастным НВ, имеющим автомат перекоса, а также дальнейшего улучшения весовой отдачи и повышения полезной нагрузки, особенно, без дальнейшего увеличения взлетного веса при выполнении ВВП и зависания.
Известен комплекс для поражения подводных лодок (ПЛ) на больших дальностях, патент RU 2371668 С2, выполненный в виде баллистической ракеты (БР), в носовой части которой под сбрасываемым обтекателем размещена крылатая ракета (КР); БР содержит аэродинамические поверхности с приводами и разгонный двигатель для обеспечения доставки КР на дальность стрельбы к району расположения цели. Для экономичного полета в атмосфере КР состыкована с разгонным двигателем посредством устройства отделения, выполнена с возможностью полета в районе расположения ПЛ-цели и содержит отделяемую боевую часть (БЧ) подводного действия и отделяемый радиогидроакустический буй; система управления КР снабжена аппаратурой для приема информации от радиогидроакустического буя по радиоканалу о местонахождения цели. В соответствии с командами, осуществляющими поиск цели, ее обнаружение, сближение с целью и ее поражение путем подрыва БЧ. После чего БР-носитель продолжает полет с работающим двигателем, уводя ее от места приводнения БЧ подводного действия, чтобы не создавать помех системе ее самонаведения. Сама же одноразовая БР уходила из района приводнения БЧ и самоликвидировалась.
Наиболее близким к предлагаемому изобретению является противолодочный ракетный комплекс (ПЛРК) "Super Icara" (Великобритания), содержит корабль-носитель (КН) с пусковым устройством РЛАН, имеющего фюзеляж, несущее крыло с органами управления, силовую установку (СУ) с турбореактивным двигателем, бортовую систему управления (БСУ), обеспечивающую автономное (АУ) и дистанционное или телемеханическое управление (ТМУ) с командного пункта (КП) КН, бортовой источник питания, отделяемую авиационную противолодочную ракету (АПР), состыкованную посредством узла отделения с РЛАН и предназначенную для поражения подводной лодки (ПЛ).
Признаки, совпадающие - габариты ПЛРК без корабельного ПУ: длина 3,42 м, размах крыльев 1,52 м, высота 1,57 м. Боевая часть: малогабаритная самонаводящаяся противолодочная торпеда (Мк 44 или Мк 46). Летные характеристики: максимальная и минимальная высота полета соответственно 300 м и 15-20 м. Ввиду значительного веса КР с торпедой Мк.44 составляющего 1480 кг (при массе в 13% целевой нагрузки - торпеды 196 кг, ее длине 2,57 м и диаметре 324 мм) и малых дальности 24 км и скорости полета 140-240 м/с, а боевой части (торпеды - 30 узлов и дальность хода 5 км).
Причины, препятствующие поставленной задаче: первая - это то, что пуск дозвукового РЛАН осуществлялся в направлении, максимально приближающем к цели сбрасываемую торпеду. Данные о местоположении цели поступали от гидроакустической системы (ГАС) надводного корабля-носителя, другого корабля или противолодочного вертолета. На основании этой информации происходит постоянное обновление данных об оптимальной зоне сброса торпеды в компьютере системы управления стрельбой, который затем передавал их через радиокомандную систему управления на РЛАН в полете. По прибытии РЛАН в район нахождения цели торпеда (самонаводящаяся МГТ Мк 44, полу утопленная с подфюзеляжным ее расположением в корпусе РЛАН) по радиокоманде отделялась, спускалась на парашюте, входила в воду и начинала поиск ПЛ-цели. После чего РЛАН продолжает полет с работающей СУ, уводя ее от места приводнения самонаводящейся МГТ, чтобы не создавать помех системе ее самонаведения. Сам же одноразовый РЛАН уходил из района и самоликвидировался.
Предлагаемым изобретением решается задача в указанном выше известном корабельном ПЛРК "Super Icara" (Великобритания) увеличения полезной нагрузки и весовой отдачи, повышения скороподъемности и дальности полета, увеличения вероятности поражения подводной цели, расположенной на большой дальности, достижения возможности барражирующего продолжительного полета в районе предполагаемого местонахождения подводной цели и атаковать ее в режиме зависания, а также возможности возврата на вертолетную площадку КН для повторного использования и трансформации в походную конфигурацию для перевозки по воде или под водой в грузовом отсеке на ложементе автономного надводно-подводного авианесущего КН.
Отличительными признаками предлагаемого изобретения от указанной выше известного ПЛРК "Super Icara", используемого с КН, наиболее близкой к нему, являются наличие того, что он оснащен, по меньшей мере, одним возвращаемым беспилотным винтовентиляторным самолетом-вертолетом (БВСВ), снабженным двухвинтовой продольно-несущей системой (ДПНС), включающей при виде сбоку над передней и задней возвышениями фюзеляжа соответствующие несущие винты (НВ) с телескопическими колонками вертикальных их валов, обеспечивающих после выдвижения последних с лопастями НВ из соответствующих верхних ниш фюзеляжа с раскрываемыми их створками создание в ДПНС-Х2 вертикальной тяги только при вертикальном и коротком взлете/посадке (ВВП и КВП), и реактивно-движительной системой (РДС), включающей в подфюзеляжной гондоле, смонтированной под нижней плавно образованной утонченностью задней части фюзеляжа, по меньшей мере, один турбореактивный двухконтурный двигатель (ТРДД), имеющий многолопастной передний вентилятор (МПВ) и плоское скошенное назад сопло, смонтированное на конце кормовой части фюзеляжа и на низко-расположенном стреловидном стабилизаторе (НСС) перед задней его кромкой, верхняя поверхность которого, уменьшая инфракрасную заметность выхлопов ТРДД, выполнена из теплостойких материалов и создающий реактивную тягу при выполнении высокоскоростного горизонтального полета при остановленных и уложенных лопастях однолопастных НВ с направленными их законцовками к центру масс при втянутых телескопических профилированных противовесов и колонок их валов в верхние ниши фюзеляжа, скошенные боковые стороны верхней и нижней частей которого, уменьшая эффективную площадь рассеивания, образуют граненную конфигурации при виде спереди с острой линией непрерывно распространяющейся от носа до хвоста, включая верхние поверхности консолей среднерасположенного стреловидного крыла (ССК), выполненного с клиновидным профилем и способностью синхронного отклонения вверх его внешних секций и последующего их складывания во время стоянки на земле так, что левая из них секция укладывается над внутренней частью ССК с совмещенным размещением их передних кромок, а правая - с параллельно расположенными передними кромками между внешними их секциями, уменьшающими стояночную площадь, и выполнен с возможностью преобразования полетной его конфигурации после выполнении технологии КВП или ВВП с винтокрыла или вертолета с ДПНС-Х2 и РДС-R1 в соответствующий скоростной винтокрыл с перегрузочным или высокоскоростной самолет с нормальным взлетным весом соответственно с двумя НВ, работающими на режимах близких к их авторотации или при зафиксированных и уложенных лопастях НВ во внутрь фюзеляжа, имеющего снизу в плавно образованном утолщении под центропланом ССК при виде сбоку бомботсек с раскрываемыми створками и узлом отделения, по меньшей мере, одной АПР, но и обратно, при этом каждая внешняя секция ССК со ступенчатым профилем концевой части на одной третьей ее размаха и непрерывной верхней поверхностью, выполнена с нижним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой, образуя равнобедренный треугольник в плане, выполняющий на ССК роль рулевых поверхностей - элеронов, создают в точке максимальной ее хорды (bmaxССК), совмещенной в уступе-вырезе с меньшей диагональю ромбовидной в плане формы, образующей как конфигурацию профиля ступеньки по ширине и глубине - это соответственно 1/2 от хорды bmaxССК и 2/3 от толщины сmaxССК, так и заостренную законцовку ССК, имеющую параболическую переднюю кромку и обратной стреловидности заднюю кромку, причем внутренние трапециевидные в плане секции ССК, имеющие как размах равновеликий размаху НСС, выполнены с передней кромкой, размещенной при виде сверху параллельно передней кромке НСС, консоли которого смонтированы с отрицательным углом поперечного V, а его законцовки снабжены вертикальными килями, так и заднюю кромку, образующую с задней кромкой внешних секций ССК пилообразную совместную ее конфигурации в плане, причем подфюзеляжный воздухозаборник ТРДД, выполненный S-образным при виде сбоку, снабжен передней кромкой входного устройства мотогондолы, расположенной при виде сбоку параллельно передней кромке стреловидным килям Н-образного хвостового оперения, при этом продольные НВ, не взаимодействующие с МПВ ТРДД, выполнены без управления циклического изменения их шага и с жестким креплением их лопастей, но и создания в ДПНС-Х2 от НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между НВ, например, при виде сверху передний и задний НВ вращаются соответственно по часовой и против часовой стрелки, причем конвертируемый ТРДД, выполненный с возможностью на режимах ВВП и зависания его преобразования в модификацию турбовального двигателя (ТВаД) с элементами цифрового программного управления, сочетающего в двухрежимной системе регулирования и управления поочередной его работы как в режиме отбора свободной мощности на привод НВ в ДПНС-Х2, так и в режиме распределения отбора мощности между МПВ и РДС-R1 в ТРДД для увеличения совместной их маршевой и реактивной тяги для высокоскоростного горизонтального полета, при этом конвертируемый ТРДД выполнен с управляемыми заслонками в окнах кожуха внутреннего контура, направляющими от МПВ наружный поток воздуха вовнутрь на свободную турбину низкого давления (СТНД) или по внешнему контуру соответственно на вертолетных или самолетных режимах полета, но и средним выводом вала для отбора его мощности от СТНД посредством соосного вала, проложенного внутри вала компрессора высокого давления (КВД) и конусной зубчатой передачи, смонтированной с радиальным выходным, направленным вверх, валом перед КВД для передачи через муфту сцепления крутящего момента на Т-образный при виде сбоку главный редуктор, имеющий продольные выходные валы, проложенные в фюзеляже до угловых переднего и заднего редукторов НВ, смонтированных в соответствующих возвышениях фюзеляжа.
Кроме того, БВСВ снабжен движительно-рулевой системой (ДРС) с кормовыми кольцевыми каналами (ККК), смонтированными по бокам мотогондолы, имеющими с противоположным вращением многолопастные винтовентиляторы, приводимые соответствующими поперечными валами промежуточного Т-образного при виде спереди редуктора, смонтированного перед муфтой сцепления главного редуктора в системе его трансмиссии, изменяющие балансировку по курсу и создающие совместную тягу с реактивной тягой ТРДД при выполнении соответственно ВВП и высокоскоростного горизонтального полета, при этом каждый ККК, имеющий флюгерный винтовентилятор с саблевидными лопастями, снабжен на выходе нижним и верхним элевонами, разнесенными от оси вращения винтовентилятора на величину половины его радиуса, причем упомянутые клиновидные профили внешних секций низкорасположенного стреловидного крыла (НСК) и непрерывной нижней поверхностью концевых их частей, отклоненных по радиусу вверх с возвышением, создающим для общего размаха НСК положительный угол ϕ=+5° поперечного V, выполнены с верхним уступом-вырезом ромбовидной в плане формы, при этом однолопастные НВ со ступенчатым профилем концевой части на одной третьей радиуса каждой с обратным сужением лопасти, имеющей концевую хорду лопасти в 2,0 раза больше ее корневой хорды и клиновидный профиль с углом α=10° и непрерывной нижней поверхностью, выполнен с верхним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой, имея вогнутые во внутрь задние кромки лопасти, создают в точке максимальной ее хорды (bmaxНВ), совмещенной в уступе-вырезе с меньшей диагональю ромбовидной в плане формы, образующей как конфигурацию профиля ступеньки по ширине и глубине - это соответственно 1/2 от хорды bmaxНВ и 2/3 от толщины сmaxНВ, так и заостренную законцовку лопасти, имеющую параболическую переднюю кромку и обратной стреловидности заднюю кромку, причем однолопастные НВ, размещенные в полностью симметричной и синхронно-сбалансированной ДПНС-Х2 и работающие без перекрытия на винтокрылых режимах полета совместно с маршевой тягой в ДРС-Х2, продольная ось их винтовентиляторов в ККК размещена выше продольной линии, проходящей при виде сбоку над вертикальным центром масс, и, следовательно, уменьшает возможность возникновения кабрирующего момента, при этом упомянутые телескопические противовесы НВ имеют радиус (rтп) во втянутом и выдвинутом положении равновеликий радиусу обтекателя втулки НВ, имеющего диаметрально размещенные срезы в виде круговых сегментов, хорды которых равновелики корневым хордам НВ и противовеса, и 30% от радиуса НВ соответственно, причем каждый противовес, имеющий корневую и концевую хорды соответственно равновеликую и в 1,2 раза меньше корневой хорды НВ, выполнен с концевой частью в виде ответного сегмента окружности с диаметром равновеликим обтекателю втулки НВ, сопрягаемого при его втягивании со срезом кругового сегмента втулки, образуя удобообтекаемую ее круглую в плане форму.
Кроме того, носовой подфюзеляжный киль БВСВ и упомянутые вертикальные кили, имеющие снизу на их концах обтекатели, снабжены соответственно не убираемыми с амортизирующимися опорами переднего и задних колес, при этом с передних концов обтекателей задних колес смонтированы видеокамеры, используемые при вертикальной посадке, причем упомянутые клиновидные профили лопастей НВ и непрерывной верхней их поверхностью выполнены с нижним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой образуют упомянутый равнобедренный треугольник в плане, выполняющий на лопастях с полужестким креплением роль рулевых поверхностей, снабженных сервоприводом и возможностью при выполнении ВВП и зависания их синхронного отклонения в вертикальной плоскости так, что как при синфазном их отклонении вниз и вверх и прохождении при этом лопастей НВ с одной стороны фюзеляжа, изменяют балансировку по крену соответственно влево и вправо, так и дифференциальном их отклонении вниз/вверх и вверх/вниз при прохождении лопастей переднего и заднего НВ спереди и сзади соответствующих частей фюзеляжа, изменяют балансировку по тангажу, создают соответственно кабрирующий и пикирующий моменты.
Кроме того, БВСВ в винтокрылой полетной конфигурацией с вращающимися НВ снабжен опускаемой гидроакустической системой, состоящей из индикатора акустических сигналов и двух приемников для их приема от гидроакустического буя, их кодирования и передачи по восьмиканальной закрытой связи на КН для обработки в реальном масштабе времени, и высокочувствительным магнитометром, смонтированным в удлиненном обтекателе под центропланом НСС так, что в нижней задней его части установлен магниточувствительный элемент, работающий на расстоянии 30 м от водной поверхности, и связанным с его БСУ, предусматривающей выдачу команд на включение в расчетной точке магнитометра и на управление после срабатывания магнитометра при обнаружении ПЛ-цели, но и регистрации в запоминающем устройстве БСУ координат точки обнаружения ПЛ-цели при передаче на КН и его КП, при этом БВСВ имеет как радиоканал закрытой связи c КН, представляющий собой автономный надводно-подводный авианесущий корабль (АНПАК), так и радиолокационную станцию с передатчиком команд, оптико-электронную систему с двухканальным автоматом сопровождения цели и вычислительную систему с блоком автоматики многофункционального пульта управления, обеспечивающего при горизонтальном крейсерском полете самостоятельное нахождение ПЛ-цели, идентификации ее и принятие подтвержденного решения от оператора АНПАК об уничтожении им выбранных, но и возможность его транспортирования в ангаре АНПАК и походной его конфигурации со сложенными концевыми частями крыльев при зафиксированных соответствующим образом лопастях однолопастных НВ, причем АНПАК имеет три прочных корпуса, расположенных горизонтально рядом так, что по бокам от среднего прочного корпуса смонтированы бок о бок еще два прочных корпуса, каждый из которых выполнен с меньшим диаметром, составляющим 55% от диаметра большего корпуса, но и способность погружаться с надводного положения в подводное и обратно, а также перемещаться под водой или по воде и в полупогруженном состоянии, последнее, наряду с радиопоглощающим покрытием удобообтекаемой центральной надстройки, имеющей наклоненные боковые панели, повышает малозаметность и предопределяет большую скрытность по сравнению с обычными КН, при этом АНПАК, подводная часть корпуса которого выполнена в виде туннельного типа с одной площадью ватерлинии, имеет по обе стороны от оси его симметрии совместно с боковыми его корпусами криволинейную форму нижней части его корпуса и снабжен двумя с открытым низом арочными продольными каналами, расположенными, образуя при виде спереди гребенчатую конфигурацию, параллельно оси симметрии, оснащен вдоль продольной оси каждого из каналов левым и правым прямоточными высокоэффективными водометными движителями насосного типа (ВДНТ) с поворотными эжекторными насадками на их выходе, обеспечивающими в конфигурации надводного корабля-тримарана с максимальной шириной кормовой части корпуса АНПАК возможность его использования или при отсутствии воздушного зазора в районе верхней поверхности каждого арочного канала для исключения влияния ударных вертикальных нагрузок в этом районе каждого арочного канала при движении на встречном волнении, или при отсутствии большого волнения после продувки соответствующих балластных цистерн может перемещаться, увеличив скорость хода при той же мощности двигателей и имея геометрию с минимальным волновым сопротивлением посредством того, что наружные стенки арочных каналов в корпусе АНПАК размещены параллельно его оси симметрии, образуя ширину палубы АНПАК с наружными стенками боковых корпусов АНПАК в районе кормовой оконечности практически параллельны оси симметрии и, следовательно, разрежение, которое возникает на корпусе в этом районе по бортам, при движении со скоростью, соответствующей  , не будет влиять на сопротивление корпуса АНПАК, особенно, с использованием передних подводных крыльев, причем в носовой части АНПАК установлен малогабаритный гидроакустический комплекс, например, "Припять-Пм", а также четыре торпедных аппарата калибра 533 миллиметра, размещенных в первом его отсеке с боезапасом из восьми торпед, при этом прочная рубка, снабженная за ней и спереди комплексами соответственно зенитным «Дуэт» и зенитным ракетно-артиллерийским "Каштан", убирающимися в походном положении в контейнеры внутри легкого корпуса, имеет для наблюдения за поверхностью воды на верхней поверхности рубки выдвижную мачту, оснащенную радаром и оптическими датчиками в двух гиростабилизированных фото-видео системах, одна из которых работает в инфракрасном диапазоне, оснащена вдоль продольного среднего корпуса в ее продолжение задним авиационным прочным ангаром для размещения в нем на стационарных V-образных в плане ложементах, фиксирующих колеса шасси, по меньшей мере, двух расположенных тандемом БВСВ, имеющим с его заднего торца автоматически раскрываемые соответствующие прочные люки, причем прочный ангар снабжен выдвижным столом-спутником, имеющим телескопические переднюю и заднюю стойки-ложементы, фиксирующие соответствующие части фюзеляжа БВСВ, и возможность при поднятых стойках-ложементах перемещения по оси симметрии АНПАК вперед-назад для фиксированного в нем размещения фюзеляжа БВСВ при убранных НВ во внутрь фюзеляжа и сложенных внешних секциях упомянутого ССК в походно-заряжающей конфигурации, при этом средний прочный корпус на верхней его части за кормовым ангаром снабжен горизонтальной взлетно-посадочной площадкой (ГВПП), имеющей длину равновеликую длине фюзеляжа БВСВ с вращающимися продольными НВ и систему принудительной сушки ее поверхности, но и в ее центре систему швартовки и принудительной вертикальной посадки (СШПВП) БВСВ на выдвинутый из ангара стол-спутник со стойками-ложементами, причем кормовая СШПВП, обеспечивающая возможность посадки БВСВ на АНПАК при кренах до 25° и представляющая собой при виде спереди П-образную раму с телескопическими боковыми стойками, размещенную перпендикулярно продольной оси среднего корпуса, выполнена с возможностью ее поворота в вертикальной плоскости вдоль последнего с горизонтального в вертикальное положение, снабжена сверху в середине ее поперечины цанговым узлом с пропущенным через него тросом с развитым эллипсовидным коушем, размещенным в центрирующем узле строго вдоль поперечины большей его диагональю и взаимодействующим с захватом отклоняемого вниз при посадке гака БВСВ, закрепленного под центром его масс, причем при вертикальной посадке БВСВ после зацепления гака и коуша троса его намотка/размотка производится сквозь палубный герметичный узел на ГВПП и обеспечивается лебедкой с барабаном и следящим его электроприводом, установленной под центром ГВПП в герметичном контейнере внутри легкого корпуса, с последующим разжимом цангового узла поперечины и одновременным втягиванием стоек П-образной рамы и ее поворота в горизонтальное положение так, что ее поперечина с цанговым узлом скользя по тросу опускается вниз и размещается в соответствующем углублении над центром ГВПП, после чего БВСВ осуществляет вертикальную посадку на стойки-ложементы стола-спутника с одновременной подмоткой троса, затем после фиксации зажимами фюзеляжа БВСВ захват его гака отсоединяется от коуша троса и стол-спутник с закрепленным на нем БВСВ перемещается во внутрь ангара и опускается на стационарные V-образные в плане ложементы на позиции заправки топливом и заряжания боекомплектом, например, АПР, размещенными в шестипозиционных транспортных накопителях (ШТН) револьверного типа, смонтированных по два ШТН с каждой стороны внутри каждого бокового корпуса, при этом вдоль продольной оси среднего корпуса между каждой парой ШТН, смонтированной по обе стороны от позиции автоматического перезаряжания БВСВ в ангаре, смонтирована механическая рука с захватом, обеспечивающая автоматический съем АПР с позиции разгрузки одного из ШТН, ее поворот вверх на угол 90° в вертикальной поперечной плоскости и подъем в верх в раскрытые люк подпола ангара и бомбоотсек БВСВ для ее подвески на автоматические замки крепления балочного держателя, причем после выполнения всех вышеперечисленных операций в обратном порядке с автоматической выкаткой стола-спутника из ангара на ГВПП готового БВСВ, жестко удерживаемого фиксаторами стоек-ложементов до тех пор, пока его несущая система достигнет необходимого уровня подъемной силы, затем синхронно и автоматически отключается работа замков всех фиксаторов и выполняется вертикальный его взлет.
, не будет влиять на сопротивление корпуса АНПАК, особенно, с использованием передних подводных крыльев, причем в носовой части АНПАК установлен малогабаритный гидроакустический комплекс, например, "Припять-Пм", а также четыре торпедных аппарата калибра 533 миллиметра, размещенных в первом его отсеке с боезапасом из восьми торпед, при этом прочная рубка, снабженная за ней и спереди комплексами соответственно зенитным «Дуэт» и зенитным ракетно-артиллерийским "Каштан", убирающимися в походном положении в контейнеры внутри легкого корпуса, имеет для наблюдения за поверхностью воды на верхней поверхности рубки выдвижную мачту, оснащенную радаром и оптическими датчиками в двух гиростабилизированных фото-видео системах, одна из которых работает в инфракрасном диапазоне, оснащена вдоль продольного среднего корпуса в ее продолжение задним авиационным прочным ангаром для размещения в нем на стационарных V-образных в плане ложементах, фиксирующих колеса шасси, по меньшей мере, двух расположенных тандемом БВСВ, имеющим с его заднего торца автоматически раскрываемые соответствующие прочные люки, причем прочный ангар снабжен выдвижным столом-спутником, имеющим телескопические переднюю и заднюю стойки-ложементы, фиксирующие соответствующие части фюзеляжа БВСВ, и возможность при поднятых стойках-ложементах перемещения по оси симметрии АНПАК вперед-назад для фиксированного в нем размещения фюзеляжа БВСВ при убранных НВ во внутрь фюзеляжа и сложенных внешних секциях упомянутого ССК в походно-заряжающей конфигурации, при этом средний прочный корпус на верхней его части за кормовым ангаром снабжен горизонтальной взлетно-посадочной площадкой (ГВПП), имеющей длину равновеликую длине фюзеляжа БВСВ с вращающимися продольными НВ и систему принудительной сушки ее поверхности, но и в ее центре систему швартовки и принудительной вертикальной посадки (СШПВП) БВСВ на выдвинутый из ангара стол-спутник со стойками-ложементами, причем кормовая СШПВП, обеспечивающая возможность посадки БВСВ на АНПАК при кренах до 25° и представляющая собой при виде спереди П-образную раму с телескопическими боковыми стойками, размещенную перпендикулярно продольной оси среднего корпуса, выполнена с возможностью ее поворота в вертикальной плоскости вдоль последнего с горизонтального в вертикальное положение, снабжена сверху в середине ее поперечины цанговым узлом с пропущенным через него тросом с развитым эллипсовидным коушем, размещенным в центрирующем узле строго вдоль поперечины большей его диагональю и взаимодействующим с захватом отклоняемого вниз при посадке гака БВСВ, закрепленного под центром его масс, причем при вертикальной посадке БВСВ после зацепления гака и коуша троса его намотка/размотка производится сквозь палубный герметичный узел на ГВПП и обеспечивается лебедкой с барабаном и следящим его электроприводом, установленной под центром ГВПП в герметичном контейнере внутри легкого корпуса, с последующим разжимом цангового узла поперечины и одновременным втягиванием стоек П-образной рамы и ее поворота в горизонтальное положение так, что ее поперечина с цанговым узлом скользя по тросу опускается вниз и размещается в соответствующем углублении над центром ГВПП, после чего БВСВ осуществляет вертикальную посадку на стойки-ложементы стола-спутника с одновременной подмоткой троса, затем после фиксации зажимами фюзеляжа БВСВ захват его гака отсоединяется от коуша троса и стол-спутник с закрепленным на нем БВСВ перемещается во внутрь ангара и опускается на стационарные V-образные в плане ложементы на позиции заправки топливом и заряжания боекомплектом, например, АПР, размещенными в шестипозиционных транспортных накопителях (ШТН) револьверного типа, смонтированных по два ШТН с каждой стороны внутри каждого бокового корпуса, при этом вдоль продольной оси среднего корпуса между каждой парой ШТН, смонтированной по обе стороны от позиции автоматического перезаряжания БВСВ в ангаре, смонтирована механическая рука с захватом, обеспечивающая автоматический съем АПР с позиции разгрузки одного из ШТН, ее поворот вверх на угол 90° в вертикальной поперечной плоскости и подъем в верх в раскрытые люк подпола ангара и бомбоотсек БВСВ для ее подвески на автоматические замки крепления балочного держателя, причем после выполнения всех вышеперечисленных операций в обратном порядке с автоматической выкаткой стола-спутника из ангара на ГВПП готового БВСВ, жестко удерживаемого фиксаторами стоек-ложементов до тех пор, пока его несущая система достигнет необходимого уровня подъемной силы, затем синхронно и автоматически отключается работа замков всех фиксаторов и выполняется вертикальный его взлет.
Способ применения ПЛРК, заключающийся в том, что ПЛ-цель обнаруживают в условиях наблюдения за ней в пассивном режиме работы гидроакустической станции БВСВ или гидроакустического комплекса АНПАК, когда дистанция до ПЛ-цели, находящейся на значительном удалении от АНПАК, известна ориентировочно, выдают на БВСВ, несущий по меньшей мере две АПР, данные первичного целеуказания, в том числе только пеленг на ПЛ-цель, выполняют предстартовую подготовку и проверку АПР, вводят в БСУ БВСВ полетное задание и после автоматической выкатки стола-спутника на ГВПП, обеспечивается вертикальный взлет БВСВ, управляют им на стартовом и маршевом участках траектории с использованием его БСУ и в дистанционном исполнении по командам от системы ТМУ с АНПАК, удерживают маршевую малую высоту полета БВСВ, обеспечивающую обнаружение ПЛ-цели на глубине до 600 м, по команде БСУ осуществляют поиск цели после включения магнитометра на заданном маршруте барражирующего кругового полета, с обнаружением ПЛ-цели в БСУ вырабатывают команду и выполняют маневр БВСВ для сброса АПР, передают сигнал об обнаружении цели с ее координатами по системе взаимного обмена информацией (ВЗОИ) с первой АПР через БСУ БВСВ на другую АПР залпа, рассчитывают маневр для сброса второй АПР в зоне захвата ПЛ-цели неконтактной системой обнаружения (НСО) первой АПР, в случае непопадания точки сброса АПР в эту зону или в соответствии с заданием рассчитывают круговой маневр с применением системы наведения БВСВ с адаптивным углом упреждения его на ПЛ-цель, который автоматически определяется при сближении с ПЛ-целью и корректирует требуемый разворот БВСВ для сброса второй АПР в расчетной точке и затем выполняют маневр БВСВ для сброса второй АПР, при получении сигнала от другой АПР залпа об обнаружении и захвате ПЛ-цели выполняют ее совместную атаку путем сближения АПР на дистанцию срабатывания их неконтактных взрывателей или до момента столкновения АПР с корпусом ПЛ-цели, подрывают взрывчатое вещество боевой части каждой АПР и поражают ПЛ-цель, после чего в БСУ БВСВ вырабатывают команды по его управлению для автоматического возврата и вертикальной посадки на стойки ложемента стола-спутника АНПАК с использованием СШПВП.
Кроме того, способ применения ПЛРК, заключающийся в том, что БВСВ, несущий по одной АПР и противокорабельной ракете, обеспечивает соответствующую борьбу с ПЛ-целью и надводным кораблем, выполняет вертикальный взлет с ГВПП АНПАК, при этом планер БВСВ выполнен из композиционных материалов по малозаметной технологии, а его БСУ снабжена возможностью опционального его управления пилотами из двухместной кабины, имеющей катапультируемые в верхнюю полусферу кресла, срабатывающие после отстрела пиропатронами лопасти и втягивания противовеса переднего НВ и размещенные бок о бок, но и его использования в составе авиационной группы в качестве головного совместно с двумя беспилотными аппаратами, один из которых, являясь ведомым, автоматически повторяет маневры головного, а другой - управляется вторым пилотом с головного, а затем и наоборот.
Благодаря наличию этих признаков, которые позволят освоить противолодочный ракетный комплекс (ПЛРК), оснащенный, по меньшей мере, одним возвращаемым беспилотным винтовентиляторным самолетом-вертолетом (БВСВ), снабженным двухвинтовой продольно-несущей системой (ДПНС), включающей при виде сбоку над передней и задней возвышениями фюзеляжа соответствующие несущие винты (НВ) с телескопическими колонками вертикальных их валов, обеспечивающих после выдвижения последних с лопастями НВ из соответствующих верхних ниш фюзеляжа с раскрываемыми их створками создание в ДПНС-Х2 вертикальной тяги только при вертикальном и коротком взлете/посадке (ВВП и КВП), и реактивно-движительной системой (РДС), включающей в подфюзеляжной гондоле, смонтированной под нижней плавно образованной утонченностью задней части фюзеляжа, по меньшей мере, один турбореактивный двухконтурный двигатель (ТРДД), имеющий многолопастной передний вентилятор (МПВ) и плоское скошенное назад сопло, смонтированное на конце кормовой части фюзеляжа и на низко-расположенном стреловидном стабилизаторе (НСС) перед задней его кромкой, верхняя поверхность которого, уменьшая инфракрасную заметность выхлопов ТРДД, выполнена из теплостойких материалов и создающий реактивную тягу при выполнении высокоскоростного горизонтального полета при остановленных и уложенных лопастях однолопастных НВ с направленными их законцовками к центру масс при втянутых телескопических профилированных противовесов и колонок их валов в верхние ниши фюзеляжа, скошенные боковые стороны верхней и нижней частей которого, уменьшая эффективную площадь рассеивания, образуют граненную конфигурации при виде спереди с острой линией непрерывно распространяющейся от носа до хвоста, включая верхние поверхности консолей среднерасположенного стреловидного крыла (ССК), выполненного с клиновидным профилем и способностью синхронного отклонения вверх его внешних секций и последующего их складывания во время стоянки на земле так, что левая из них секция укладывается над внутренней частью ССК с совмещенным размещением их передних кромок, а правая - с параллельно расположенными передними кромками между внешними их секциями, уменьшающими стояночную площадь, и выполнен с возможностью преобразования полетной его конфигурации после выполнении технологии КВП или ВВП с винтокрыла или вертолета с ДПНС-Х2 и РДС-R1 в соответствующий скоростной винтокрыл с перегрузочным или высокоскоростной самолет с нормальным взлетным весом соответственно с двумя НВ, работающими на режимах близких к их авторотации или при зафиксированных и уложенных лопастях НВ во внутрь фюзеляжа, имеющего снизу в плавно образованном утолщении под центропланом ССК при виде сбоку бомботсек с раскрываемыми створками и узлом отделения, по меньшей мере, одной АПР, но и обратно, при этом каждая внешняя секция ССК со ступенчатым профилем концевой части на одной третьей ее размаха и непрерывной верхней поверхностью, выполнена с нижним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой, образуя равнобедренный треугольник в плане, выполняющий на ССК роль рулевых поверхностей - элеронов, создают в точке максимальной ее хорды (bmaxССК), совмещенной в уступе-вырезе с меньшей диагональю ромбовидной в плане формы, образующей как конфигурацию профиля ступеньки по ширине и глубине - это соответственно 1/2 от хорды bmaxССК и 2/3 от толщины сmaxССК так и заостренную законцовку ССК, имеющую параболическую переднюю кромку и обратной стреловидности заднюю кромку, причем внутренние трапециевидные в плане секции ССК, имеющие как размах равновеликий размаху НСС, выполнены с передней кромкой, размещенной при виде сверху параллельно передней кромке НСС, консоли которого смонтированы с отрицательным углом поперечного V, а его законцовки снабжены вертикальными килями, так и заднюю кромку, образующую с задней кромкой внешних секций ССК пилообразную совместную ее конфигурации в плане, причем подфюзеляжный воздухозаборник ТРДД, выполненный S-образным при виде сбоку, снабжен передней кромкой входного устройства мотогондолы, расположенной при виде сбоку параллельно передней кромке стреловидным килям Н-образного хвостового оперения, при этом продольные НВ, не взаимодействующие с МПВ ТРДД, выполнены без управления циклического изменения их шага и с жестким креплением их лопастей, но и создания в ДПНС-Х2 от НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между НВ, например, при виде сверху передний и задний НВ вращаются соответственно по часовой и против часовой стрелки, причем конвертируемый ТРДД, выполненный с возможностью на режимах ВВП и зависания его преобразования в модификацию турбовального двигателя (ТВаД) с элементами цифрового программного управления, сочетающего в двухрежимной системе регулирования и управления поочередной его работы как в режиме отбора свободной мощности на привод НВ в ДПНС-Х2, так и в режиме распределения отбора мощности между МПВ и РДС-R1 в ТРДД для увеличения совместной их маршевой и реактивной тяги для высокоскоростного горизонтального полета, при этом конвертируемый ТРДД выполнен с управляемыми заслонками в окнах кожуха внутреннего контура, направляющими от МПВ наружный поток воздуха вовнутрь на свободную турбину низкого давления (СТНД) или по внешнему контуру соответственно на вертолетных или самолетных режимах полета, но и средним выводом вала для отбора его мощности от СТНД посредством соосного вала, проложенного внутри вала компрессора высокого давления (КВД) и конусной зубчатой передачи, смонтированной с радиальным выходным, направленным вверх, валом перед КВД для передачи через муфту сцепления крутящего момента на Т-образный при виде сбоку главный редуктор, имеющий продольные выходные валы, проложенные в фюзеляже до угловых переднего и заднего редукторов НВ, смонтированных в соответствующих возвышениях фюзеляжа. Все это позволит в БВСВ при переходных маневрах повысить продольную устойчивость и управляемость по крену, а размещение СУ с ТРДД в кормовой части фюзеляжа позволит упростить систему трансмиссии. Пилообразная изогнутая задняя кромка ССК ограждает от радаров турбину ТРДД наравне с обратным скосом передней кромки входного устройства воздухозаборника, но и увеличивает показатели аэродинамических и структурных преимуществ клиновидного ССК, особенно, с нижней непрерывной поверхностью и верхним ромбовидным в плане уступом-вырезом и, следовательно, позволяет достичь улучшенного большого ламинарного течения. Причем воздухозаборник ТРДД, выполненный с S-образным при виде сбоку, также ограждает наравне с плавно образованным нижним утолщением фюзеляжа от радаров его турбину. Кроме того, это позволит повысить безопасность полетов и использовать ТРДД меньших габаритов в их поперечнике, что уменьшит мидель подфюзеляжной мотогондолы и ее аэродинамическое сопротивление. Применение однолопастных убираемых НВ в верхнюю часть фюзеляжа позволит достичь более высокую аэродинамическую эффективность. Поэтому основной режим работы однолопастных НВ - это выполнение ВВП и зависания БВСВ. В случае появления косого обдува тяга НВ изменяется циклически. Поэтому жесткое крепление лопастей улучшает управляемость, особенно, однолопастных НВ. В синхронизированных продольных НВ моменты Мкрен и Мпрод от переднего и заднего однолопастных НВ с противоположным вращением при передаче на фюзеляж взаимно уничтожаются. При этом наступающие лопасти НВ, проходя над левым и правым бортами фюзеляжа соответственно от центра масс к носу и от кормы к центру масс и, как следствие, обеспечивают создание от НВ более плавного обтекания воздушным потоком фюзеляжа, исключающего резонансные его колебания совместно с НСС Н-образного хвостового оперения. Поэтому коэффициент аэродинамической выгодности однолопастных НВ в симметричной двухвинтовой продольной схеме будет в 1,24-1,26 выше, чем у вертолетного трехлопастного одного НВ с рулевым винтом. Что позволит уменьшить вес планера, выполненного по малозаметной технологии, особенно, палубного БВСВ, улучшить весовую отдачу и повысить на 45% скорость и топливную эффективность в сравнении со скоростными вертолетами "Raider S-97" и "AVX", а также конвертопланами Bell V-280 "Valor" и его беспилотной версии палубным Bell V-247. Более того, это позволит также увеличить полезную нагрузку и весовую отдачу, улучшить поперечно-продольную управляемость, повысить скорость и дальность полета БВСВ, но и увеличить вероятность поражения подводной цели и повысить эффективность противолодочной обороны при высокоскоростном горизонтальном полете БВСВ, особенно, опционально управляемых БВСВ, используемых совместно с БВСВ в ударно-разведывательной авиационной группе с автономного надводно-подводного авианесущего корабля (АНПАК).
Предлагаемое изобретение предпочтительного исполнения палубного БВСВ для АНПАК с ДПНС-Х2, ДРС-Х2 и РДС-R2 в ТРДД, размещенном в подфюзеляжной мотогондоле, иллюстрируется на фиг. 1 и общих видах сбоку и сверху соответственно а) и б) с расположением однолопастных переднего и заднего НВ при его использовании:
а) в полетной конфигурации реактивного самолета с уложенными лопастями в верхние ниши фюзеляжа двух однолопастных НВ при втянутых телескопических их противовесов и колонок валов, реактивной и маршевой тягой, обеспечиваемой ТРДД в РДС-R2 и ДРС-Х2 винтовентиляторами в боковых ККК, а также внешние секции ССК с непрерывной нижней поверхностью и верхним ромбовидным в плане уступом;
б) в полетной конфигурации вертолета с передним и задним однолопастными НВ в ДПНС-Х2, лопасти которых свободно вращаются без перекрытия НВ в противоположные стороны над фюзеляжем после открытия створок в его верхних нишах и выдвижения колонок валов с НВ и их противовесов с условным расположением внешних правых секций ССК в стояночной конфигурации на палубе или в ангаре;
в) горизонтальный разрез правого ТРДД, расположенного зеркально к левому в двухдвигательной мотогондоле СУ, с радиальным для отбора мощности валом, направленным к оси симметрии БВСВ, условным расположением заслонок конвертируемого ТРДД открывающих/перекрывающих окна внутреннего контура, преобразующих его в ТВаД/ТРДД с указанием в его контурах направления воздушных потоков.
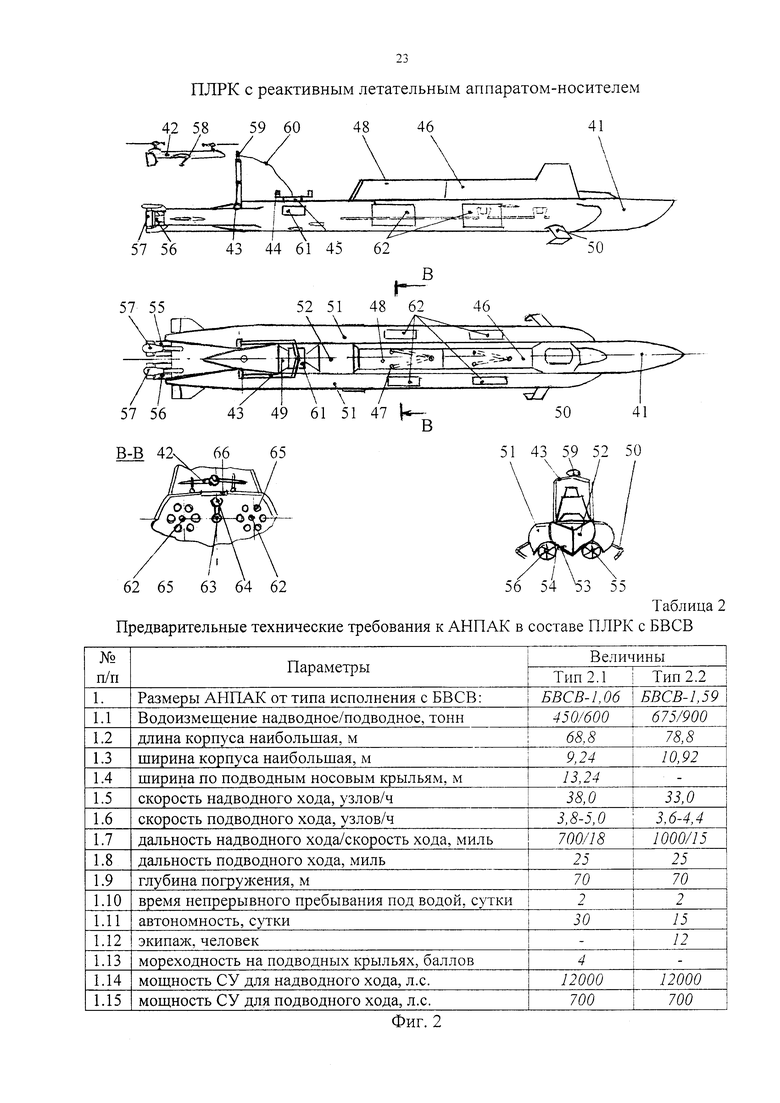
На фиг. 2 изображен АНПАК 41 с корабельным ПЛРК в посадочной конфигурации БВСВ 42 с использованием поворотной П-образной рамы 43 СШПВП на стойки-ложементы 44 стола спутника 45, перемещающегося во внутрь первого ангара 46 и опускается на стационарные V-образные в плане ложементы 47 на позиции стоянки при уложенных 22-23 НВ и внешних секций 18 ССК 15 для перевозки, заправки топливом и заряжания боекомплектом на каждой станции, включая, второго ангара 48 и последующей выкатки стола-спутника 45 с задним БВСВ 42 из ангара 48 на ГВПП 49 с разложенными внешними секциями 18 ССК 15 и лопастями переднего 22 и заднего 23 НВ для его вертикального взлета при поднятых стойках-ложементах 44.
Корабельный ПЛРК на базе АНПАК с высокоскоростным БВСВ, представленным на фиг. 1, выполнен по концепции ДПНС-Х2 с ДРС-Х2 и планером из композитного углепластика, содержит фюзеляж 1, имеющий при виде сбоку плавно образованные сверху передний 2 и задний 3 возвышения с автоматически раскрываемыми створками 4 продольного отсека, но и снизу двигательный отсек с подфюзеляжным воздухозаборником 5 со скошенной передней его кромкой параллельно размещенной скосу 6 нижней утонченности фюзеляжа 1 и передней кромке разнесенных килей 7 с рулями направления 8, снабженных на их законцовках обтекателями 9 с не убираемыми амортизирующимися опорами задних колес 10 при убираемой носовой стойке колеса 11. Хвостовое Н-образное оперение имеет НСС 12 с рулями высоты 13, смонтированный под скошенными назад плоскими соплами 14, например, двух ТРДД с РДС-R2 и с их МПВ (на фиг. 1 не показаны). С клиновидным профилем ССК 15, имеющего предкрылки 16, трапециевидные в плане внутренние секции 17 с закрылками 18 и поворотные в верх плоскости внешних секций 19 с закрылками 18 и элеронами 20. Внешние секции 19 ССК 15 и непрерывной нижней поверхностью концевых их частей 21, отклоненных по радиусу вверх с возвышением, создающим для общего размаха ССК 15 положительный угол ϕ=+5° поперечного V, выполнены с верхним уступом-вырезом ромбовидной в плане формы (см. на фиг. 1 вид А-А).
Продольные передний 22 и задний 23 однолопастные НВ, каждый из которых имеет телескопические противовесы 24 и колонки вертикальных валов (на фиг. 1 не показаны), которые закреплены на соответствующих выходных валах угловых редукторов ДПНС-Х2, равноудаленных от центра масс, смонтированы внутри соответствующих возвышений 2-3 фюзеляжа 1, имеющего сверху ниши с автоматически раскрываемыми створками 4 (показаны на фиг. 1б закрытые) для укладки соответствующих НВ 22-23. Во время аварийной посадки при выполнении ВВП в случае отказа двигателей БВСВ его однолопастные 22-23 НВ, работают на режиме авторотации разгружают ССК 15. При этом закрылки 18 ССК 15 автоматически отклоняются на угол 47°, а при выполнении КВП в винтокрылой конфигурации и для уменьшения потерь в вертикальной тяге НВ 22-23 - на угол 30°. Все однолопастные НВ 22-23 в ДПНС-Х2 выполнены без автоматов перекоса и с полужестким креплением их лопастей, но и возможностью создания от всех НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между НВ в продольной их группе, например, из нее передний 22 и задний 23 НВ при виде сверху соответственно вращаются по часовой стрелке и против часовой стрелки (см фиг. 1б). Каждый однолопастной НВ 22-23, имея клиновидные профили лопастей и непрерывной верхней их поверхностью выполнены с нижним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой образуют равнобедренный треугольник в плане, выполняющий на лопастях НВ 22-23, имеющих полужесткое крепление лопастей, роль рулевых поверхностей 25, изменяющие продольно-поперечную балансировку при ВВП (см. на фиг. 1 вид Б-Б). Конвертируемая СУ в подфюзеляжной мотогондоле 26 с ТРДД, расположенной в кормовой части фюзеляжа 1 и по обе стороны от оси симметрии (см. фиг. 1б) снабжена двумя выносными многолопастными винто-вентиляторами 27 в боковых ККК 28 с их приводом от объединительного редуктора, плавно распределяющего системой трансмиссии взлетную мощность ТРДД между ДРС-Х2 и ДПНС-Х2 или ДРС-Х2 и РДС-R2 соответственно при выполнении ВВП и зависания или высокоскоростного горизонтального полета БВСВ. На выходе каждого ККК 28 смонтированы верхний и нижний элевоны 29, изменяющие продольно-поперечную балансировку при ВВП и зависании. Каждый ТРДД, образуя с объединительным редуктором синхронизирующую систему, снабжен муфтой сцепления и для ВВП и зависания выполнен конвертируемым с управляемыми заслонками 30 в окнах 31 кожуха внутреннего контура 32, направляющими от МПВ 33 с компрессором 34 низкого давления (КНД) наружный поток воздуха вовнутрь на турбину 35 низкого давления (ТНД) или по внешнему контуру соответственно на вертолетных или самолетных режимах полета, но и со средним выводом вала для отбора его мощности от турбины 36 высокого давления (ТВД) посредством соосного вала 37 компрессора 38 высокого давления (КВД) и конусной зубчатой передачи 39, смонтированной с радиальным выходным, направленным к оси симметрии, валом 40 перед КВД 38 (см. фиг. 1в) для передачи через муфту сцепления крутящего момента на объединительный Т-образный в плане редуктор, имеющий выходные валы, проложенные в верхней части фюзеляжа 1 до угловых редукторов НВ 22-23, смонтированных внутри возвышений 2-3 (на фиг. 1 не показаны). Избыточная тяговооруженность СУ обеспечивает продолжение полета при одном работающем ТРДД и вращение продольных 22-23 НВ во время переходного режима, что создает возможность осуществления полета или аварийной посадки с авторотирующими 22-23 НВ, что повышает уровень безопасности полетов. При горизонтальном высокоскоростном полете БВСВ в самолетной его конфигурации мощность от одного работающего на 40% ТРДД передается многолопастным винтовентиляторам 27 в двух ККК 28 (показаны только на фиг. 1б) и РДС-R2 в соотношении 90% на 10% располагаемой мощности.
Управление высокоскоростным БВСВ обеспечивается общим и дифференциальным изменением шага продольной группы НВ 22-23 и отклонением рулевых поверхностей: элеронов 20, рулей высоты 13 и направления 8. При крейсерском полете подъемная сила создается ССК 15 с трапециевидными внутренними его секциями 17 с системой развитых ее наплывов (см. фиг. 16), горизонтальная тяга - двумя многолопастными винтовентиляторами 27 в боковых ККК 28, на режиме висения только однолопастными НВ 22-23, на режиме перехода - ССК 15 и с НВ 22-23. При переходе к вертикальному взлету-посадке (висению) внутренние и внешние закрылки 18 (см. фиг. 1б) ССК 15 синхронно отклоняются на максимальные их углы. После создания подъемной тяги продольными 22-23 НВ обеспечиваются режимы ВВП и зависания с использованием только однолопастных НВ 22-23 (см. рис. 1б). При синфазном отклонении рулевых поверхностей 25 с сервоприводом (см. фиг. 1б) НВ 22-23 вверх или вниз при прохождении их лопастей, располагаясь вдоль оси симметрии за центром масс и кормовой частью фюзеляжа 1, изменяют продольную балансировку, а при синфазном их отклонении вверх-вниз при одновременном прохождении лопастей НВ 22-23 с противоположных боковых сторон фюзеляжа 1, изменяют балансировку по крену при выполнении ВВП и зависания. При висении на вертолетных режимах полета БВСВ путевое управление осуществляется дифференциальным изменением шага продольных переднего 22 и заднего 23 однолопастных НВ.
После вертикального взлета и набора высоты, убирается механизация ССК 15 и для перехода на самолетный горизонтальный режим полета лопасти однолопастных 22-23 НВ синхронно останавливаются так, что их законцовки направлены навстречу и к центру масс, фиксируются по оси симметрии и укладываются при втянутых их противовесах во внутрь верхних ниш фюзеляжа 1 посредством втягивания телескопических колонок их вертикальных валов, (см. фиг. 1а) и затем создается совместная маршевая и реактивная тяга через плоские сопла 14 соответственно многолопастными винтовентиляторами 27 в двух ККК 28 и реактивной тягой от двух ТРДД и производится высокоскоростной крейсерский полет, при котором путевое управление обеспечивается рулями направления 8. Продольное и поперечное управление осуществляется синфазным и дифференциальным отклонением рулей высоты 12 НСС 13 и элеронов 20 ССК 15 или элевонами 29 на выходе боковых ККК 28 соответственно.
Малозаметный АНПАК 41 с передними подводными крыльями 50, представленный на фиг. 2 с предварительными техническими требования к АНПАК в табл. 2, имеет три прочных разновеликих корпуса, два прочных меньших 51 корпуса из которых смонтированы со средним большим 52 бок о бок, образуя подводную частью его корпуса туннельного типа 53, снабжен в кормовой части арочных продольных каналах 54 левым 55 и правым 56 прямоточными высокоэффективными ВДНТ с поворотными эжекторными насадками 57 на их выходе. При вертикальной посадке БВСВ 42 после зацепления гака 58 и коуша 59 троса 60, наматываемого лебедкой 61 с барабаном и следящим его электроприводом, установленной под центром ГВПП 49 в герметичном контейнере, втягиваются стойки П-образной рамы 43, которая после ее поворота вниз в горизонтальное положение, укладывается в углубление над центром ГВПП 49. Затем одновременно с подмоткой троса 60 на лебедку 61 БВСВ 42 выполняет вертикальную посадку с последующей его фиксацией поднятыми стойками-ложементами 44 на разъединенных по оси симметрии автономных частях стола-спутника 45.
На позиции заряжания боекомплектом, например, АПР, размещенными в ШТН 62 револьверного типа, смонтированных по два ШТН 62 с каждой стороны внутри каждого бокового 51 корпуса. Вдоль продольной оси среднего 52 корпуса между каждой парой ШТН, смонтированной по обе стороны от позиции автоматического перезаряжания БВСВ 42 в каждом из ангаров 46, 48, смонтирована механическая рука 63 с захватом 64, обеспечивающая автоматический съем АПР 65 с позиции разгрузки из ШТН 62, ее поворот вверх на угол 90° в вертикальной поперечной плоскости и подъем в верх в раскрытые люки подпола 66 ангаров 46, 48 и бомбоотсек БВСВ 42 для ее подвески на автоматические замки крепления (на фиг. 2 не показаны).
Таким образом, высокоскоростной БВСВ с РДС-R2, ДРС-Х2 и ДПНС-Х2, имеющий выносные винтовентиляторы в двух ККК и однолопастные продольные НВ, передний и задний из которых установлены над соответствующими верхними возвышениями фюзеляжа, представляет собой винтовентиляторный преобразуемый винтокрылый летательный аппарат, который изменяет свой полетную конфигурацию только благодаря укладки лопастей НВ во внутрь верхней части фюзеляжа и вдоль продольной его оси. Плоское сопло в РДС-R1 от ТРДД и многолопастные винтовентиляторы в боковых ККК, создающие реактивную и маршевую тягу, обеспечивают повышение скорости на самолетных режимах полета, но и уменьшение дистанции при взлете с коротким разбегом. Развитые наплывы ССК, создавая за сет увеличения в 1,18 раза коэффициента их совместного поднятия в производстве подъемной силы, позволит наравне с высокой тяговооруженностью СУ реализовать возможность выполнения технологии ВВП и КВП при взлетно-посадочных режимах полета и, особенно, палубных БВСВ с конвертируемой СУ, которая обладает наименьшей массой, особенно с механическим приводом двух винтовентиляторов в ККК от ТРДД. Однако, такая СУ данной схемы имеет повышенный по сравнению с турбовинтовой СУ расход топлива. Поэтому, такая СУ может рассматриваться в качестве альтернативной только для палубных БВСВ небольшой продолжительности времени полета.
Однако, нет никаких сомнений в том, что на пути освоения БВСВ, используя вышеназванные преимущества, предстоит преодолеть еще немало трудностей и проблем. Это в первую очередь относится к решению проблем аэродинамической интерференции продольных однолопастных НВ и возможности обеспечения устойчивости и управляемости на режимах ВВП и зависания при их работе в синхронно-сбалансированной и симметричной ДПНС-Х2 с однолопастными НВ, которые весьма перспективны в качестве останавливаемых и убираемых в полете НВ, что исключит наличие узлов переворота лопастей (для организации симметричных дополнительных поверхностей крыла-тандема относительно продольной оси) и их использования в качестве винтов-крыльев, приводящих к увеличению аэродинамического сопротивления, что является ограничивающим фактором, особенно, для реактивных СВВП.
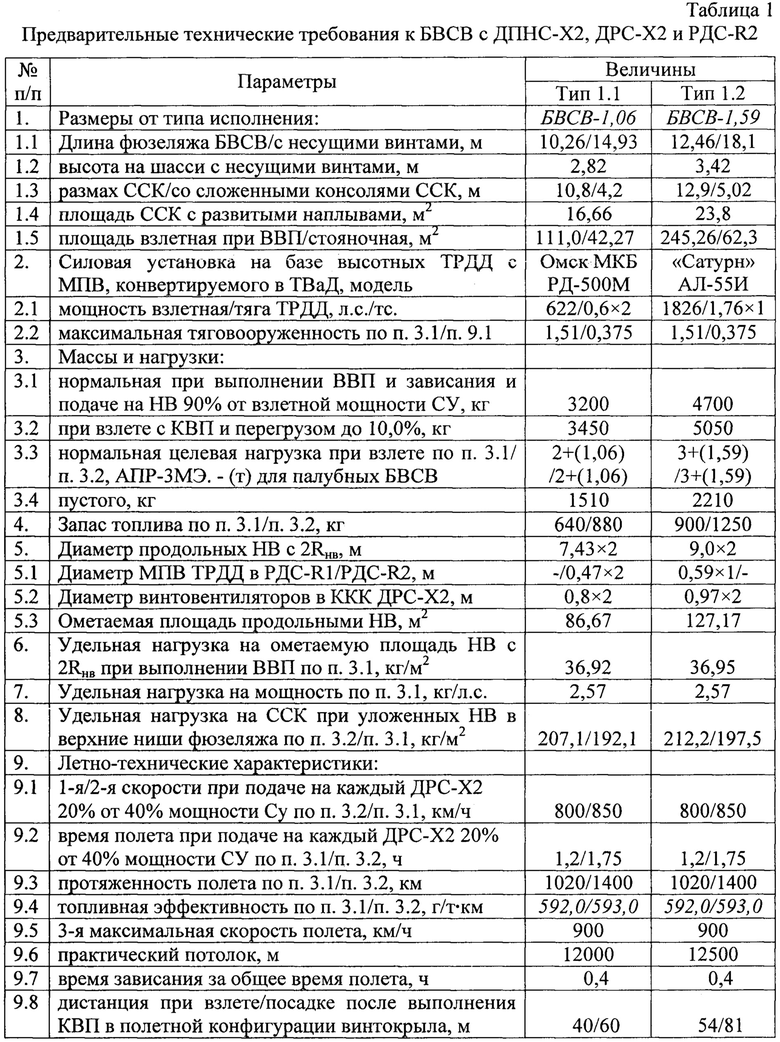
Несомненно, с течением времени широкое использование ТРДД в конвертируемой СУ с выносными винтовентиляторами в боковых ККК позволит добиться снижения расхода топлива почти на половину в сравнении со скоростными вертолетами двухвинтовой соосной схемы американских компаний AVX и Sikorsky, что немаловажно, особенно, для опционально управляемых палубных БВСВ-1,59, используемых совместно с БВСВ-1,06 в ударно-разведывательной авиационной группе (см. табл. 1).

Изобретение относится к области авиации, в частности к средствам борьбы с подводными лодками. Палубный авиационный беспилотный противолодочный комплекс содержит беспилотный самолет-вертолет (БСВ), имеющий фюзеляж, крыло, силовую установку с турбореактивным двигателем, систему управления, обеспечивающую автономное и дистанционное управление с корабля-носителя, источник питания, отделяемую авиационную противолодочную ракету. БСВ снабжен двухвинтовой продольно-несущей системой, включающей несущие винты (НВ) с телескопическими колонками вертикальных валов, выдвигающимися из ниш фюзеляжа с раскрываемыми створками и создающими вертикальную тягу при вертикальном и коротком взлете/посадке, и реактивно-движительной системой. Обеспечивается увеличение вероятности поражения подводной цели на большой дальности, возможность продолжительного полета в районе местонахождения подводной цели и атаки ее в режиме зависания. 3 з.п. ф-лы, 4 ил., 1 табл.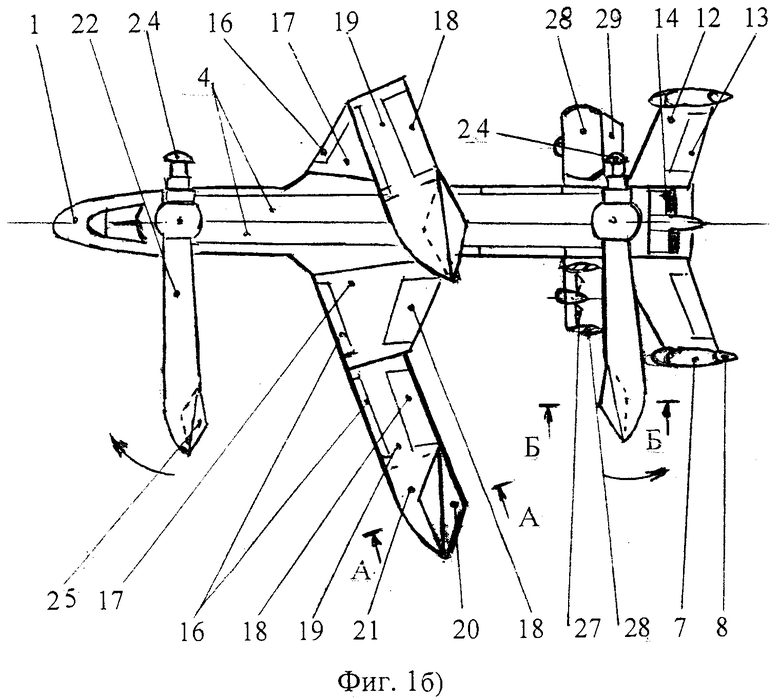
1. Палубный авиационный беспилотный противолодочный комплекс (ПАБПК) содержит беспилотный летательный аппарат, имеющий фюзеляж, несущее крыло с органами управления, силовую установку (СУ) с турбореактивным двигателем, бортовую систему управления (БСУ), обеспечивающую автономное (АУ) и дистанционное или телемеханическое управление (ТМУ) с командного пункта (КП) корабля-носителя (КН), бортовой источник питания, отделяемую авиационную противолодочную ракету (АПР), состыкованную посредством узла отделения с летательным аппаратом и предназначенную для поражения подводной лодки (ПЛ), отличающийся тем, что он оснащен, по меньшей мере, одним возвращаемым беспилотным самолетом-вертолетом (БСВ), снабженным двухвинтовой продольно-несущей системой (ДПНС), включающей при виде сбоку над передней и задней возвышениями фюзеляжа соответствующие несущие винты (НВ) с телескопическими колонками вертикальных их валов, обеспечивающих после выдвижения последних с лопастями НВ из соответствующих верхних ниш фюзеляжа с раскрываемыми их створками создание в ДПНС-Х2 вертикальной тяги только при вертикальном и коротком взлете/посадке (ВВП и КВП), и реактивно-движительной системой (РДС), включающей в подфюзеляжной гондоле, смонтированной под нижней плавно образованной утонченностью задней части фюзеляжа, по меньшей мере, один турбореактивный двухконтурный двигатель (ТРДД), имеющий многолопастной передний вентилятор (МПВ) и плоское скошенное назад сопло, смонтированное на конце кормовой части фюзеляжа и на низкорасположенном стреловидном стабилизаторе (НСС) перед задней его кромкой, верхняя поверхность которого, уменьшая инфракрасную заметность выхлопов ТРДД, выполнена из теплостойких материалов и создающий реактивную тягу при выполнении высокоскоростного горизонтального полета при остановленных и уложенных лопастях однолопастных НВ с направленными их законцовками к центру масс при втянутых телескопических профилированных противовесах и колонках их валов в верхние ниши фюзеляжа, скошенные боковые стороны верхней и нижней частей которого, уменьшая эффективную площадь рассеивания, образуют граненую конфигурацию при виде спереди с острой линией, непрерывно распространяющейся от носа до хвоста, включая верхние поверхности консолей среднерасположенного стреловидного крыла (ССК), выполненного с клиновидным профилем и способностью синхронного отклонения вверх его внешних секций и последующего их складывания во время стоянки на земле так, что левая из них секция укладывается над внутренней частью ССК с совмещенным размещением их передних кромок, а правая - с параллельно расположенными передними кромками между внешними их секциями, уменьшающими стояночную площадь, и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии КВП или ВВП с винтокрыла или вертолета с ДПНС-Х2 и РДС-R1 в соответствующий скоростной винтокрыл с перегрузочным или высокоскоростной самолет с нормальным взлетным весом соответственно с двумя НВ, работающими на режимах, близких к их авторотации, или при зафиксированных и уложенных лопастях НВ вовнутрь фюзеляжа, имеющего снизу в плавно образованном утолщении под центропланом ССК при виде сбоку бомбоотсек с раскрываемыми створками и узлом отделения, по меньшей мере, одной АПР, но и обратно, при этом каждая внешняя секция ССК со ступенчатым профилем концевой части на одной третьей ее размаха и непрерывной верхней поверхностью выполнена с нижним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой, образуя равнобедренный треугольник в плане, выполняющий на ССК роль рулевых поверхностей - элеронов, создают в точке максимальной ее хорды (bmaxCCK), совмещенной в уступе-вырезе с меньшей диагональю ромбовидной в плане формы, образующей как конфигурацию профиля ступеньки по ширине и глубине - это соответственно 1/2 от хорды bmaxCCK и 2/3 от толщины cmaxCCK, так и заостренную законцовку ССК, имеющую параболическую переднюю кромку и обратной стреловидности заднюю кромку, причем внутренние трапециевидные в плане секции ССК, имеющие как размах, равновеликий размаху НСС, выполнены с передней кромкой, размещенной при виде сверху параллельно передней кромке НСС, консоли которого смонтированы с отрицательным углом поперечного V, а его законцовки снабжены вертикальными килями, так и заднюю кромку, образующую с задней кромкой внешних секций ССК пилообразную совместную ее конфигурацию в плане, причем подфюзеляжный воздухозаборник ТРДД, выполненный S-образным при виде сбоку, снабжен передней кромкой входного устройства мотогондолы, расположенной при виде сбоку параллельно передней кромке стреловидным килям Н-образного хвостового оперения, при этом продольные НВ, не взаимодействующие с МПВ ТРДД, выполнены без управления циклического изменения их шага и с жестким креплением их лопастей, но и создания в ДПНС-Х2 от НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между НВ, например, при виде сверху передний и задний НВ вращаются соответственно по часовой и против часовой стрелки, причем конвертируемый ТРДД, выполненный с возможностью на режимах ВВП и зависания его преобразования в модификацию турбовального двигателя (ТВаД) с элементами цифрового программного управления, сочетающего в двухрежимной системе регулирования и управления поочередной его работы как в режиме отбора свободной мощности на привод НВ в ДПНС-Х2, так и в режиме распределения отбора мощности между МПВ и РДС-R1 в ТРДД для увеличения совместной их маршевой и реактивной тяги для высокоскоростного горизонтального полета, при этом конвертируемый ТРДД выполнен с управляемыми заслонками в окнах кожуха внутреннего контура, направляющими от МПВ наружный поток воздуха вовнутрь на свободную турбину низкого давления (СТНД) или по внешнему контуру соответственно на вертолетных или самолетных режимах полета, но и средним выводом вала для отбора его мощности от СТНД посредством соосного вала, проложенного внутри вала компрессора высокого давления (КВД) и конусной зубчатой передачи, смонтированной с радиальным выходным направленным вверх валом перед КВД для передачи через муфту сцепления крутящего момента на Т-образный при виде сбоку главный редуктор, имеющий продольные выходные валы, проложенные в фюзеляже до угловых переднего и заднего редукторов НВ, смонтированных в соответствующих возвышениях фюзеляжа.
2. Комплекс по п. 1, отличающийся тем, что БСВ снабжен движительно-рулевой системой (ДРС) с кормовыми кольцевыми каналами (ККК), смонтированными по бокам мотогондолы, имеющими с противоположным вращением многолопастные винтовентиляторы, приводимые соответствующими поперечными валами промежуточного Т-образного при виде спереди редуктора, смонтированного перед муфтой сцепления главного редуктора в системе его трансмиссии, изменяющие балансировку по курсу и создающие совместную тягу с реактивной тягой ТРДД при выполнении соответственно ВВП и высокоскоростного горизонтального полета, при этом каждый ККК, имеющий флюгерный винтовентилятор с саблевидными лопастями, снабжен на выходе нижним и верхним элевонами, разнесенными от оси вращения винтовентилятора на величину половины его радиуса, причем упомянутые клиновидные профили внешних секций низкорасположенного стреловидного крыла (НСК) и непрерывной нижней поверхностью концевых их частей, отклоненных по радиусу вверх с возвышением, создающим для общего размаха НСК положительный угол ϕ=+5° поперечного V, выполнены с верхним уступом-вырезом ромбовидной в плане формы, при этом однолопастные НВ со ступенчатым профилем концевой части на одной третьей радиуса каждой с обратным сужением лопасти, имеющей концевую хорду лопасти в 2,0 раза больше ее корневой хорды и клиновидный профиль с углом α=10° и непрерывной нижней поверхностью, выполнен с верхним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой, имея вогнутые вовнутрь задние кромки лопасти, создают в точке максимальной ее хорды (bmaxHB), совмещенной в уступе-вырезе с меньшей диагональю ромбовидной в плане формы, образующей как конфигурацию профиля ступеньки по ширине и глубине – это соответственно 1/2 от хорды bmaxHB и 2/3 от толщины cmaxHB, так и заостренную законцовку лопасти, имеющую параболическую переднюю кромку и обратной стреловидности заднюю кромку, причем однолопастные НВ, размещенные в полностью симметричной и синхронно-сбалансированной ДПНС-Х2 и работающие без перекрытия на винтокрылых режимах полета совместно с маршевой тягой в ДРС-Х2, продольная ось их винтовентиляторов в ККК размещена выше продольной линии, проходящей при виде сбоку над вертикальным центром масс, и, следовательно, уменьшает возможность возникновения кабрирующего момента, при этом упомянутые телескопические противовесы НВ имеют радиус (rтп) во втянутом и выдвинутом положении равновеликий радиусу обтекателя втулки НВ, имеющего диаметрально размещенные срезы в виде круговых сегментов, хорды которых равновелики корневым хордам НВ и противовеса, и 30% от радиуса НВ соответственно, причем каждый противовес, имеющий корневую и концевую хорды соответственно, равновеликую и в 1,2 раза меньше корневой хорды НВ, выполнен с концевой частью в виде ответного сегмента окружности с диаметром, равновеликим обтекателю втулки НВ, сопрягаемого при его втягивании со срезом кругового сегмента втулки, образуя удобообтекаемую ее круглую в плане форму.
3. Комплекс по п. 2, отличающийся тем, что носовой подфюзеляжный киль БСВ и упомянутые вертикальные кили, имеющие снизу на их концах обтекатели, снабжены соответственно не убираемыми с амортизирующимися опорами переднего и задних колес, при этом с передних концов обтекателей задних колес смонтированы видеокамеры, используемые при вертикальной посадке, причем упомянутые клиновидные профили лопастей НВ и непрерывной верхней их поверхностью выполнены с нижним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой образуют упомянутый равнобедренный треугольник в плане, выполняющий на лопастях с полужестким креплением роль рулевых поверхностей, снабженных сервоприводом и возможностью при выполнении ВВП и зависания их синхронного отклонения в вертикальной плоскости так, что как при синфазном их отклонении вниз и вверх и прохождении при этом лопастей НВ с одной стороны фюзеляжа, изменяют балансировку по крену соответственно влево и вправо, так и дифференциальном их отклонении вниз/вверх и вверх/вниз при прохождении лопастей переднего и заднего НВ спереди и сзади соответствующих частей фюзеляжа изменяют балансировку по тангажу, создают соответственно кабрирующий и пикирующий моменты.
4. Комплекс по любому из пп. 1-3, отличающийся тем, что БСВ снабжен опускаемой гидроакустической системой, состоящей из индикатора акустических сигналов и двух приемников для их приема от гидроакустического буя, их кодирования и передачи по восьмиканальной закрытой связи на КН для обработки в реальном масштабе времени, и высокочувствительным магнитометром, смонтированным в удлиненном обтекателе под центропланом НСС так, что в нижней задней его части установлен магниточувствительный элемент, работающий на расстоянии 30 м от водной поверхности, и связанным с его БСУ, предусматривающей выдачу команд на включение в расчетной точке магнитометра и на управление после срабатывания магнитометра при обнаружении ПЛ-цели, но и регистрации в запоминающем устройстве БСУ координат точки обнаружения ПЛ-цели при передаче на КН и его КП, при этом БСВ имеет как радиоканал закрытой связи с КН, так и радиолокационную станцию с передатчиком команд, оптико-электронную систему с двухканальным автоматом сопровождения цели и вычислительную систему с блоком автоматики многофункционального пульта управления, обеспечивающего при горизонтальном крейсерском полете самостоятельное нахождение ПЛ-цели, идентификацию ее и принятие подтвержденного решения от оператора КН об уничтожении им выбранных, но и возможность его транспортирования в ангаре КН и походной его конфигурации со сложенными концевыми частями крыльев при зафиксированных соответствующим образом лопастях однолопастных НВ.
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНЫХ ЦЕЛЕЙ НА БОЛЬШИХ ДАЛЬНОСТЯХ И КОМПЛЕКС ПРОТИВОЛОДОЧНОГО ВООРУЖЕНИЯ | 2007 |
|
RU2371668C2 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ НАВЕДЕНИЯ НА ПОДВОДНУЮ ЦЕЛЬ КОРРЕКТИРУЕМОГО ГРАВИТАЦИОННОГО СНАРЯДА ПРОТИВОЛОДОЧНОЙ БОМБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2289783C1 |
| US 20080035786 A1, 14.02.2008 | |||
| US 20030089820 A1, 15.05.2003 | |||
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА В САМОЛЕТНУЮ КОНФИГУРАЦИЮ И КОМБИНИРОВАННЫЙ САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ ВИНТОКРЫЛОЙ СХЕМЫ | 1994 |
|
RU2092392C1 |

