Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам, построенным на основе машины переменного тока и бесконтактного тахо- генератора, и может быть использовано, например, в металлорежущих станках, моделирующих стендах и т. д.
Целью изобретения является упрощение конструкции и улучщение использования двигателя по нагреву.
фиг. 2 - принципиальные схемы возможных вариантов исполнения второго делителя частоты, блока сдвига и блока управления коммутатором; на фиг. 3 - эпюры, поясняющие работу второго делителя частоты, блока сдвига и блока управления коммутатором; на фиг. 4 - эпюры, поясняющие работу коммутатора.
Числа пар полюсов двигателя, син15
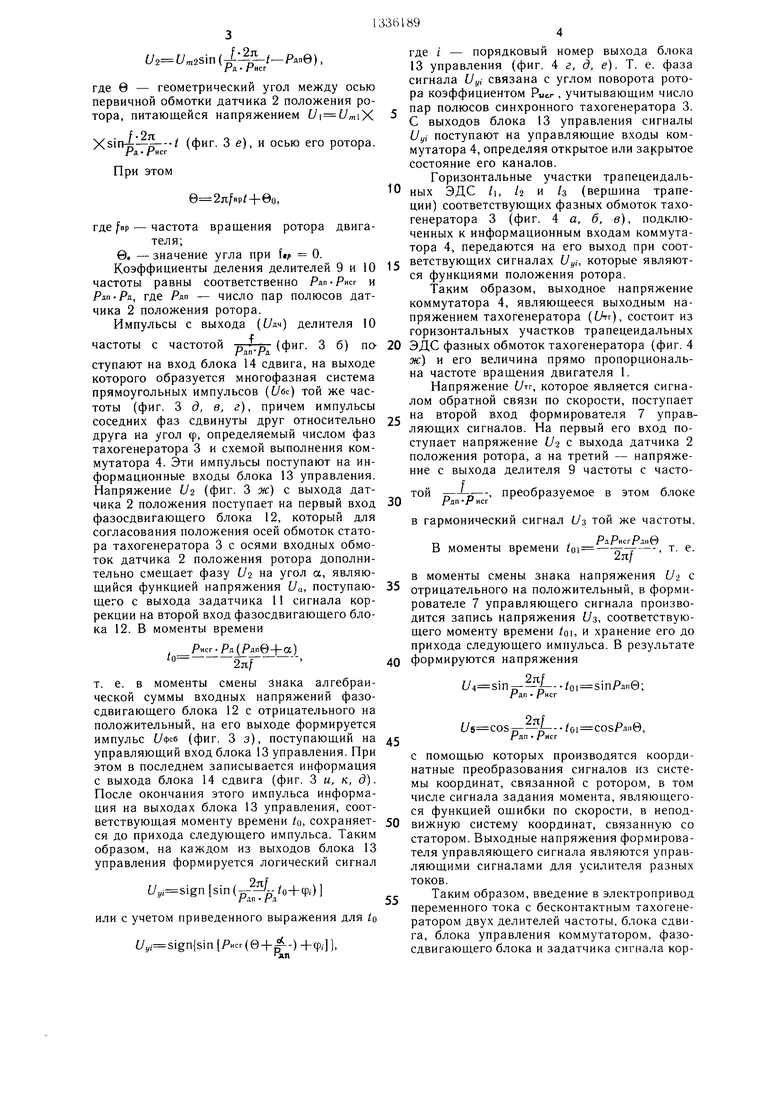
сдвигающего блока 12 соединен с выходом индуктивного датчика 2 положения, а второй - с выходом задатчика 11 сигнала коррекции.
Делители 9 и 10 частоты содержат регистр 15 (фиг. 2), охваченный через элемент И-НЕ 16 обратной связью. Выход регистра 15 через другой элемент И-НЕ 17 является выходом делителя частоты. Блок 14 сдвига содержит регистр 18, работающий в
На фиг. 1 изображена функциональная Ю режиме сдвига. Блок 13 управления имеет схема электропривода переменного тока; на регистр 19, работающий в режиме записи,
С-вход которого является управляющим, а D-входы - информационными входами блока 13 управления.
В качестве датчика 2 положения может быть использована электрическая машина типа сельсина или вращающегося трансформатора, работающая в режиме фазовращателя. Тахогенератор 3 представляет собой синхронный генератор с трапецеидальной хронного тахогенератора и индуктивного 20 формой выходного напряжения. Генератор 5 датчика положения равны соответственно импульсов может содержать последователь- трем, двум и одному, а число фаз син- но соединенные / С-цепи и элементы И-НЕ. хронного тахогенератора равно трем Блок согласования частоты может быть вы- (фиг. 2-4). полнен в виде последовательно соединен- Электропривод переменного тока содер- ных делителя частоты и формирователя жит двигатель 1 переменного тока (фиг. 1), 5 гармонических сигналов. В качестве задат- индуктивный датчик 2 положения ротора чика 11 сигнала коррекции может быть ис- двигателя, бесконтактньш синхронный тахо- пользован любой регулируемый источник на- генератрр 3, механически связанные с рото- пряжения, в простейшем случае это потен- ром двигателя 1 переменного тока, комму- циометр, подключенный к шинам питания татор 4, информационные входы которого ,, системы управления электроприводом. Фазо подключены к выходам бесконтактного син- п„,,,,,„й «п,, ю ...„„.„ д,™. „
хронного тахогенератора 3, последовательно соединенные генератор 5 импульсов и блок б согласования частот, подключенный выходом к входу индуктивного датчика 2 положения ротора, последовательно соединенные формирователь 7 управляющих сигналов с тремя входами и усилитель 8 фазных токов, выходы которого подключены к фазным обмоткам двигателя 1 переменного тока, при этом первый вход формирователя 7 управляющих сигналов соединен с выходом индуктивного 40 рого используется асинхронный или синхрон- датчика 2 положения, а второй вход - с ный двигатель) питаются от усилителя 8 фаз- выходом коммутатора 4, выполненного уп- ных токов. На валу двигателя установлен равляемым. В электропривод переменного датчик 2 положения ротора. Генератор 5 тока введены два делителя 9 и 10 частоты,импульсов вырабатывает прямоугольные имзадатчик 11 сигнала коррекции, фазосдви- пульсы U с частотой / (фиг. 3 а); которые гающий блок 12 с двумя входами, блок 13 поступают одновременно на входы делителей управления коммутатором с управляющим и 9 и 10 частоты и блок 6 согласования информационным входами и блок 14 сдвига,частот, на выходе которого формируется
подключенный выходом к информационному требуемая двухфазная система синусоидаль- входу блока 13 управления коммутатором 4, ных напряжений для обеспечения работы управляющий вход блока 13 соединен с выхо- „ датчика 2 положения ротора в режиме - J, и.,- 10 л..,,фазовращателя. Частота этих напряжений
35
сдвигающий блок 12 может быть выполнен из последовательно соединенных суммирующего компаратора и формирователя импульсов. Входы суммирующего компаратора являются входами фазосдвигающего блока 12, выходом которого служит выход формирователя импульсов.
Электропривод переменного тока с бесконтактным тахогенератором работает следующим образом.
Обмотки двигателя 1 (в качестве которавна
.„.
Рд -Рисг
(где Рд и РИСГ - числа пар
дом фазосдвигающего блока 12, выход блока 13 управления подключен к управляющему входу коммутатора 4, входы делителей 9 и 10 частоты соединены с выходом генератора 5 импульсов. Выход первого делителя 9 частоты подключен к третьему входу 55 хронного тахогенератора). формирователя 7 управляющих сигналов, аВыходное напряжение датчика 2 поло(фиг. 3 ж) определяется
полюсов соответственно двигателя и синвыход второго делителя 10 частоты - к входу блока 14 сдвига. Первый вход фазожения ротора выражением
В качестве датчика 2 положения может быть использована электрическая машина типа сельсина или вращающегося трансформатора, работающая в режиме фазовращателя. Тахогенератор 3 представляет собой синхронный генератор с трапецеидальной 0 формой выходного напряжения. Генератор 5 импульсов может содержать последователь- но соединенные / С-цепи и элементы И-НЕ. Блок согласования частоты может быть вы- полнен в виде последовательно соединен- ных делителя частоты и формирователя 5 гармонических сигналов. В качестве задат- чика 11 сигнала коррекции может быть ис- пользован любой регулируемый источник на- пряжения, в простейшем случае это потен- циометр, подключенный к шинам питания , системы управления электроприводом. Фазо п„,,,,,„й «п,, ю ...„„.„ д,™. „
0 рого используется асинхронный или синхрон- ный двигатель) питаются от усилителя 8 фаз- ных токов. На валу двигателя установлен датчик 2 положения ротора. Генератор 5 импульсов вырабатывает прямоугольные им5
сдвигающий блок 12 может быть выполнен из последовательно соединенных суммирующего компаратора и формирователя импульсов. Входы суммирующего компаратора являются входами фазосдвигающего блока 12, выходом которого служит выход формирователя импульсов.
Электропривод переменного тока с бесконтактным тахогенератором работает следующим образом.
Обмотки двигателя 1 (в качестве которавна
.„.
Рд -Рисг
(где Рд и РИСГ - числа пар
хронного тахогенератора). Выходное напряжение датчика 2 полохронного тахогенератора). Выходное напряжение датчика 2 полополюсов соответственно двигателя и синжения ротора выражением
(/2 fym2Sin (- - /-Рдпв) , l- n /- ксг
где в - геометрический угол между осью первичной обмотки датчика 2 положения ротора, питающейся напряжением L/i fymiX
f 9тт
Xsin-/:-Я-/ (фиг. 3 е), И осью его ротора.
ГЛ г исг
При ЭТОМ
в 2п/вр;+во,
где fep - частота вращения ротора двигателя;
0, - значение угла при f«/ 0.
Коэффициенты деления делителей 9 и 10 частоты равны соответственно Рдп-Рисг и Рдп.рд, где Рдп - число пар полюсов датчика 2 положения ротора.
Импульсы с выхода (/7дч) делителя 10
частоты с частотой „ и . (фиг. 3 б) поРдп Рд
ступают на вход блока 14 сдвига, на выходе которого образуется многофазная система прямоугольных импульсов (Убс) той же частоты (фиг. 3 д, в, г), причем импульсы соседних фаз сдвинуты друг относительно друга на угол ф, определяемый числом фаз тахогенератора 3 и схемой выполнения коммутатора 4. Эти импульсы поступают на информационные входы блока 13 управления. Напряжение Uz (фиг. 3 ж) с выхода датчика 2 положения поступает на первый вход фазосдвигающего блока 12, который для согласования положения осей обмоток статора тахогенератора 3 с осями входных обмоток датчика 2 положения ротора дополнительно смещает фазу Uz на угол а, являющийся функцией напряжения Ua, поступающего с выхода задатчика 11 сигнала коррекции на второй вход фазосдвигающего блока 12. В моменты времени
Рисг. + а)
2л/
т. е. в моменты смены знака алгебраической суммы входных напряжений фазосдвигающего блока 12 с отрицательного на положительный, на его выходе формируется импульс ифсб (фиг. 3 з), поступающий на управляющий вход блока 13 управления. При этом в последнем записывается информация с выхода блока 14 сдвига (фиг. 3 и, к, д). После окончания этого импульса информация на выходах блока 13 управления, соответствующая моменту времени ta, сохраняется до прихода следующего импульса. Таким образом, на каждом из выходов блока 13 управления формируется логический сигнал
(рМ.о+Ф,-)
ИЛИ С учетом приведенного выражения для о Uyi sign{sm р„сг() +Ф,,
пи
to
где i - порядковый номер выхода блока 13 управления (фиг. 4 г, д, е). Т. е. фаза сигнала Uyi связана с углом поворота ротора коэффициентом Р«ег , учитывающим число
с пар полюсов синхронного тахогенератора 3. С выходов блока 13 управления сигналы Uyi поступают на управляющие входы коммутатора 4, определяя открытое или закрытое состояние его каналов.
Горизонтальные участки трапецеидаль0 ных ЭДС /1, /2 и /3 (верщина трапеции) соответствующих фазных обмоток тахогенератора 3 (фиг. 4 а, б, в), подк-пю- ченных к информационным входам коммутатора 4, передаются на его выход при соотс ветствующих сигналах Uy/, которые являются функциями положения ротора.
Таким образом, выходное напряжение коммутатора 4, являющееся выходным напряжением тахогенератора (iAr), состоит из горизонтальных участков трапецеидальных
0 ЭДС фазных обмоток тахогенератора (фиг. 4 ж) и его величина прямо пропорциональна частоте вращения двигателя 1.
Напряжение {Утг, которое является сигналом обратной связи по скорости, поступает
, на второй вход формирователя 7 управляющих сигналов. На первый его вход поступает напряжение Uz с выхода датчика 2 положения ротора, а на третий - напряжение с выхода делителя 9 частоты с частотой , преобразуемое в этом блоке
0Рдп-Рисг
в гармонический сигнал (7з той же частоты.
DVРдРисгРдпв
в моменты времени ,, т. е.
2л/
в моменты смены знака напряжения U-2 с отрицательного на положительный, в формирователе 7 управляющего сигнала производится запись напряжения (Уз, соответствующего моменту времени to, и хранение его до прихода следующего импульса. В результате 0 формируются напряжения
(У4 51П--J-/0| 51пРдпв; /- дп .
45
.5--J-/01 С08Рд в, {- ап
С ПОМОЩЬЮ которых производятся координатные преобразования сигналов из системы координат, связанной с ротором, в том числе сигнала задания момента, являющегося функцией ощибки по скорости, в непод0 вижную систему координат, связанную со статором. Выходные напряжения формирователя управляющего сигнала являются управляющими сигналами для усилителя разных токов.
С Таким образом, введение в электропривод переменного тока с бесконтактным тахогене- ратором двух делителей частоты, блока сдвига, блока управления коммутатором, фазосдвигающего блока и задатчика сигнала коррекции с соответствующими связями позволяет управлять коммутатором бесконтактного тахогенератора с помощью индуктивного датчика положения без использования дополнительного фотоэлектрического датчика положения, имеющего ограниченный диапазон рабочих температур, и, следовательно, упростить конструкцию и улучшить использование двигателя по нагреву по сравнению с известным решением.
Формула изобретения
10 управления коммутатором с управляющим и информационным входами и блок сдвига, подключенный выходом к информационному входу блока управлен ия коммутатором, управляющий вход которого соединен с выходом фазосдвигающего блока, причем выход
Электропривод переменного тока, содержащий двигатель, индуктивный датчик положения ротора и бесконтактный синхронный тахогенератор, механически связанные 15 блока управления коммутатором подключен
с ротором двигателя, коммутатор, инфор-к управляющему входу коммутатора, входы
мационные входы которого подключены к вы-делителей частоты соединены с выходом
ходам бесконтактного синхронного тахоге-генератора импульсов, выход первого делинератора, последовательно соединенные гене-теля частоты подключен к третьему входу ратор импульсов и блок согласования час,- 20 формирователя управляющих сигналов, вытот, подключенный выходом к входу индук-ход второго делителя частоты - к входу
тивного датчика положения ротора, последо-блока сдвига, первый вход фазосдвигающ.его
вательно соединенные формирователь управ-блока соединен с выходом индуктивного
ляющих сигналов с тремя входами и усили-датчика положения, а второй - с выходом
тель фазных токов, выходы которого под-задатчика сигнала коррекции.
Г
10
-4
сги5
5
ш-
iJllJ
ключены к фазным обмоткам двигателя, первый вход формирователя управляющих сигналов соединен с выходом индуктивного датчика положения, а второй вход - с выходом коммутатора, отличающийся тем, что, с
целью упрощения и улучшения использования двигателя по нагреву, коммутатор выполнен управляемым, и введены два делителя частоты, задатчик сигнала коррекции, фазосдвигающий блок с двумя входами, блок
управления коммутатором с управляющим и информационным входами и блок сдвига, подключенный выходом к информационному входу блока управлен ия коммутатором, управляющий вход которого соединен с выходом фазосдвигающего блока, причем выход
блока управления коммутатором подключен
прг I
f5
Т
u
L.
as.l
-П C PC512

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1987 |
|
SU1501241A1 |
| Электропривод переменного тока с бесконтактным тахогенератором | 1986 |
|
SU1411912A2 |
| Устройство для управления электроприводом переменного тока | 1987 |
|
SU1495970A1 |
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНЫМ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2081503C1 |
| Электропривод с частотно-токовым управлением | 1987 |
|
SU1495973A1 |
| Устройство для управления бесконтактным двигателем постоянного тока | 1974 |
|
SU705633A1 |
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
| Цифровое устройство одноканального фазового управления вентильным преобразователем | 1974 |
|
SU674182A1 |
| Частотно-регулируемый асинхронный электропривод | 1982 |
|
SU1099373A1 |
| Устройство согласования для бесконтактного двигателя постоянного тока | 1978 |
|
SU748700A1 |

Изобретение относится к электротехнике и может быть использовано в металлорежущих станках, моделирующих стендах. Целью изобретения является упрощение и улучшение использования по нагреву. Указанная цель достигается выполнением коммутатора (К) 4 в электроприводе переменного тока управляемым и введением делителей частоты 9, 10, задатчика 11 сигнала коррекции, фазосдвигающего блока 12, блока 13 управления К 4 и блока 14 сдвига. В результате обеспечивается управление К 4 бесконтактного тахогенератора 3 с помощью индуктивного датчика 2 положения ротора двигателя 1 без использования дополнительного фотоэлектрического датчика положения, имеющего ограниченный диапазон рабочих температур. 4 ил. со со О5 00 со
| Бродовский В | |||
| Н | |||
| и др | |||
| Бесколлекторные тахогенераторы постоянного тока.-М.: Энергоиздат, 1982, с | |||
| Ударно-долбежная врубовая машина | 1921 |
|
SU115A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Коган В | |||
| Г | |||
| и др | |||
| Транзисторные приводы с бес-коллекторными синхронными двигателями для станков с ЧПУ.-Электротехническая промышленность, сер | |||
| «Электропривод, 1984, вып | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
