(54) МЕХАНИЗМ ПЕРЕДВИЖЕНИЯ ГРУЗОПОДЪЕМНОГО СРЕДСТВА
1
Изобретение относится к области подъемно-транспортного машиностроения, а именно к механизмам передвижения грузоподъемных средств, преимущественно крановштабелеров.
Известен механизм передвижения грузоподъемного средства, содержащее двигатель соединенный со входным валом редуктора, а также дифференциальный механизм, водило которого соединено с выходным валом редуктора 1.
Недостаток известного устройства заключается в том, что оно предназначено для получения периодически меняющихся угловых скоростей вращения выходного вала и не может обеспечить вращение выходного вала с постоянной скоростью.
Известен также механизм передвижения грузоподъемного средства, содержащий двигатель, соединенный с входным валом редуктора, выполненным с кинематическими передачами, а также муфту сцепления, кинематически связанную с двигателем, привод муфты сцепления, подщипники и ведущее колесо, связанное с выходным валом редуктора 2.
Недостатком известного устройства является невозможность после остановки грузоподъемного средства возобновления движения в том же направлении.
Целью изобретения является расширение функциональных возможностей устройства.
Указанная цель достигается тем, что механизм снабжен дифференциальным механизмом с ведущими валами и корпусом, симметричным профилированным кулачком, зубчатой рейкой, выполненной с гнездом, и конечными выключателями, установленными в зоне перемещения зубчатой рейки и электрически связанными с приводом муфты сцепления, которая соединена с профилированным кулачком, расположенным в гнезде зубчатой рейки, связанной через кинематическую передачу с ведущим валом, дифференциального механизма, второй ведущий вал которого через вторую кинематическую передачу соединен с двигателем, а корпус дифференциального механизма установлен в подшипниках в корпусе редуктора и через третью кинематическую передачу подсоединен к выходному валу редуктора.
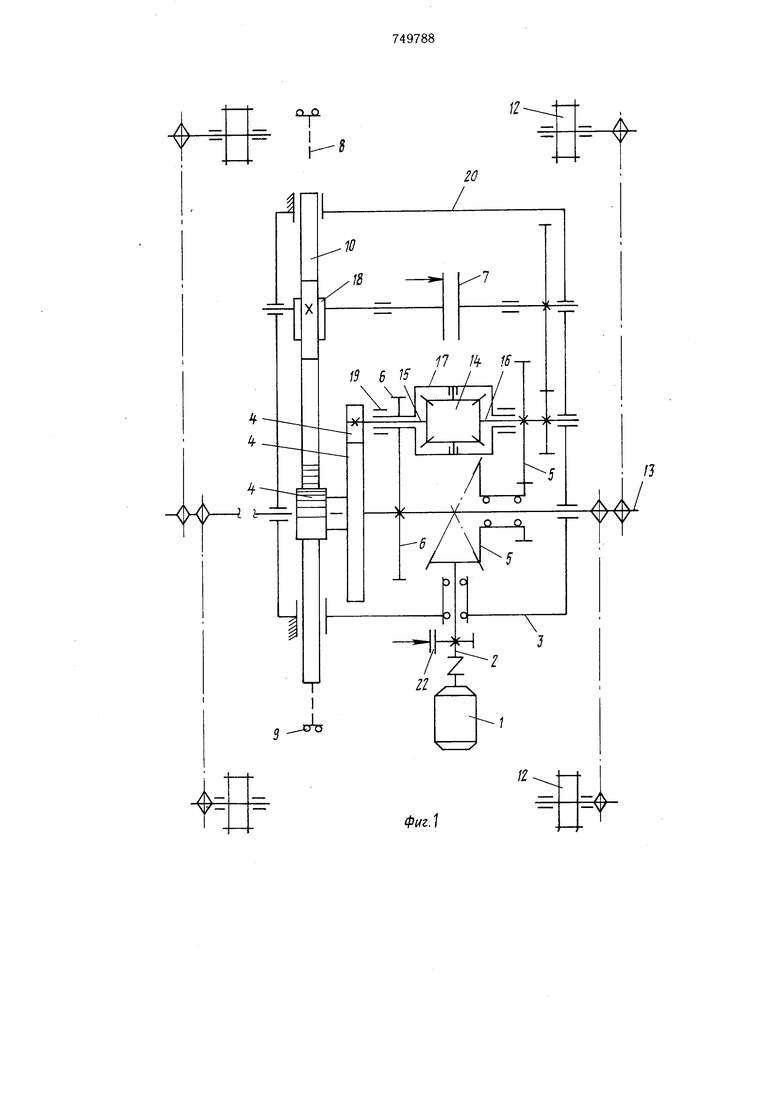
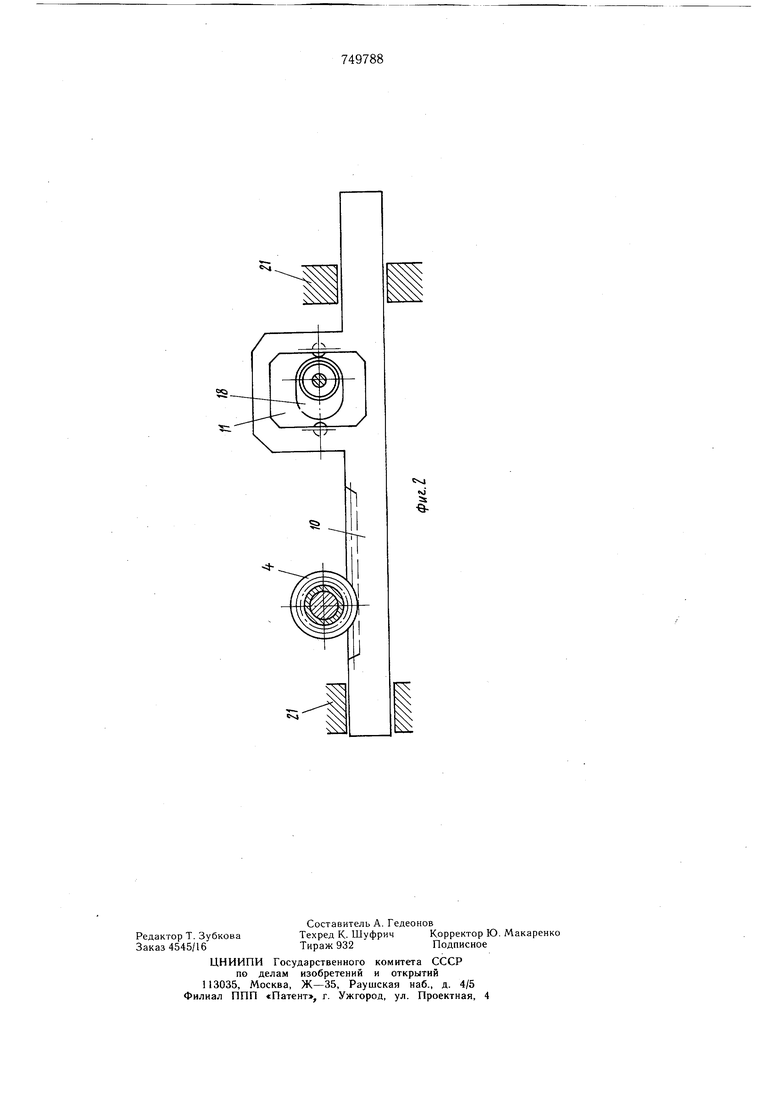
На фиг. 1 изображена икнематическая схема механизма; на фиг. 2 - зубчатая рейка с кулачком.
Механизм передвижения грузоподъемного средства содержит двигатель 1, соединенный с входным валом 2 редуктора 3, выполненным с кинематическими передачами 4-6, а также муфту 7 сцепления, кинематически связанную с двигателем 1. Привод муфты 7 (на чертежах не показан) управляется с помощью конечных выключателей 8 и 9, установленных в зоне перемещения зубчатой рейки 10, выполненной с гнездом 11.
Ведущее колесо 12 (колеса) связано с выходным валом 13 редуктора 3. Устройство снабжено дифференциальным механизмом 14, выполненным с ведущими валами 15 и 16 и корпусом 17.
Муфта 7 соединена с симметричным профилированным кулачком 18, расположенным в гнезде 11 рейки 10, связанной через передачу 4 с валом 15 механизма 14, второй вал 16 которого через вторую передачу 5 соединен с двигателем 1, а корпус 17 установлен в подшипниках 19 в корпусе 20 редуктора 3 и через третью передачу 6 подсоединен к валу 13 редуктора 3. Рейка 10 установлена в направляющих 21. Механизм снабжен тормозом 22,
Механизм работает следующим образом.
В периоды разгона и торможения грузоподъемного средства муфта 7 замыкается, превращая незамкнутый дифференциальный механизм 14 в замкнутый, замыкающая цепь которого имеет переменное передаточное отношение за счет наличия в ней передачи от кулачка 18 на рейку 10. В момент включения двигателя 1 угловая скорость всех звеньев, в том числе и вала 15, равна нулю. В связи с тем, что время, в течение которого двигатель 1 набирает номинальные обороты, существенно меньще времени разгона грузоподъемного устройства, влияние непостоянства угловой скорости ротора двигателя 1 при запуске выразится в некотором искажении заданного профилем кулачка 18 закона разгона-торможения в его начальной стадии, сделав разгон еще более плавным, но несколько удлинив его продолжительность.
В момент, когда двигатель I наберет номинальные обороты, скорость рейки 10 будет наибольшей и в дальнейшем по мере поворота кулачка 18 будет уменьшаться до нуля. Момент достижения рейкой 10 нулевой скорости соответствует повороту кулачка 18 на 180° от положения, которое он занимал в момент пуска, и срабатыванию конечного выключателя, например 9, отключающего муфту 7, давая тем самым возможность грузоподъемному средству двигаться равномерно.
При поступлении команды на торможение муфта 7 замыкается и кулачок 18, поворачиваясь, перемещает рейку 10 с возрастающей скоростью, заставляя вал 15 вращаться также с увеличивающейся угловой скоростью до тех пор, пока угловая скорость вала 15 не достигнет угловой скорости вала 16. Угловая скорость корпуса 17 и вала 13 при этом будет уменьшаться от скорости равномерного движения до нуля по закону, заданному кулачком 18. В момент достижения валом 13 нулевой скорости кулачок 18 повернется на 180° от положения, которое он занимал до начала торможения, рейка 10 нажмет на конечный выключатель, например 8, который подает команду на отключение двигателя 1, муфты 7 и включение тормоза 22.
В дальнейшем цикл повторяется.
Формула изобретения
Механизм передвижения грузоподъемного средства, преимущественно кранащтабелера, содержащее двигатель, соединенный с входным валом редуктора, выполненным с кк матическими передачами, а также муфту сцепления, кинематически связанную с двигателем, привод муфты сцепления, подщипники и ведущее колесо, связанное с выходным валом редуктора, отличающийся тем, что, с целью расширения функциональных возможностей, он снабжен дифференциальным механизмом с ведущими валами и корпусом, симметричным профилированным кулачком, зубчатой рейкой, выполненной с гнездом, и конечными выключателями, установленными в зоне перемещения зубчатой рейки, и электрически связанными с приводом муфты сцепления, которая соединена с профилированным кулачком, расположенным в гнезде зубчатой рейки, связанной через кинематическую передачу с ведущим валом дифференциального механизма, второй ведущий вал которого через вторую кинематическую передачу соединен с двигателем, а корпус дифференциального механизма установлен в подшипниках в корпусе редуктора и через третью кинематическую передачу подсоединен к выходному валу редуктора. Источники информации,
принятые во внимание при экспертизе
1.Кульчачный О. И. Теория механизмов и мащин. Проектирование. М., «Высшая школа, 1970, с. 100-101.
2.Авторское свидетельство СССР
№ 246801, кл. В 66 С 11/16, 20.05.68 (проТОТИП).
«SI
«V
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПРИВОДА УПРАВЛЯЮЩЕГО УСТРОЙСТВА | 2024 |
|
RU2826171C1 |
| Устройство для резки непрерывно-движущегося проката | 1973 |
|
SU875727A1 |
| Устройство для управления коробкой передач с плавным регулированием скорости вращения и механизмом подачи топлива транспортного средства | 1984 |
|
SU1286446A1 |
| Самоблокирующийся дифференциал колесного тракторного средства | 1984 |
|
SU1172759A1 |
| БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 1995 |
|
RU2097215C1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |
| Устройство для заливки расплава в формы | 1988 |
|
SU1533832A1 |
| Механизм переключения скоростей движения фотоленты в осциллографе | 1975 |
|
SU767521A1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| Автоматический противоугонный рельсовый захват | 1975 |
|
SU553192A1 |