Изобретение относится к подъемно-транспортному машиностроешпо, а именно к автоматическим противоугонным рельсовым захватам. Известен автоматический противоугонный рельсовый захват, содержащий рычаги, закрепленные в средней ча-сти на неподвижных осях iH связанные друг с другом пружиной, на верхних концах рычагов укреплены ролики, а на нижних - эксцентрики, ролики связаны -с распорным элементом, который кинематически соединен с приводом захвата и грузами Однако известные противоугонные захваты громоздки и недостаточно надежны в работе, так как под действием частых ударов от падения массивного груза при зажиме рельса происходит интенсивный износ насечки на прижимных элементах. Целью изобретения является повышение надельности захвата в работе путем предварительного зажатия рельса. Для этого захват снаблсен зубчатыми рейка.ми, иаправляющими, управляемой муфтой и валом с зубчатыми ишстернями, причем распорный элемент выполнен в ВИде профилированного кулачка, зубчатые рейкн « направляющие расположены вертикально, а в шакней части зубчатых реек укреплены грузы, располол енные в направляющих, при этом профилированный кулачок Лчестко укреплен на валу и кинематически соединен с приводом через управляемую муфту, а зубчатые шестерни связаны с зубчатыми рейками. На фиг. 1 изображен предлагаемый захваг, общий вид; на фиг. 2 - вид А фиг. 1; на фиг. 3 - вид Б ф.иг. 2; на фиг. 4 .- сечение В-В фиг. 1; на фИг. 5 - вид Г фиг. 2; па фиг. 6 - сечение Д-Д фиг. 2. Автоматический противоугонный рельсовый захват включает рычаги 1, свободно вращающиеся иа осях 2. Оси жестко закреплены в металлоконструкции захвата 3. На концах рычагов насажены эксцентрики 4 со съемными губками 5, на поверхности которых имеется насечка, увеличивающая сцепление их с боковыми поверхностями рельса. На верхних концах рычагов 1 насажены ролики 6, свободно вращающиеся на осях 7. Отвод эксцентриков 4 от рельса осуществляется ирул :иной 8. РОЛИКИ 7 соприкасаются с кулачком 9. Профиль кулачка самотормозящийся - угол подъема образующей профиля кулачка 9 меньше угла трения качения мелчду роликом 6 И кулачком 9. Кулачок 9 жестко закреплен на валу 10, который вращается в подшипниках 11. На валу 10 креиятся шестерни 12, входящие в зацепление с зубчатыми рейками 13. Рейки 13 закреплены на грузах 14,
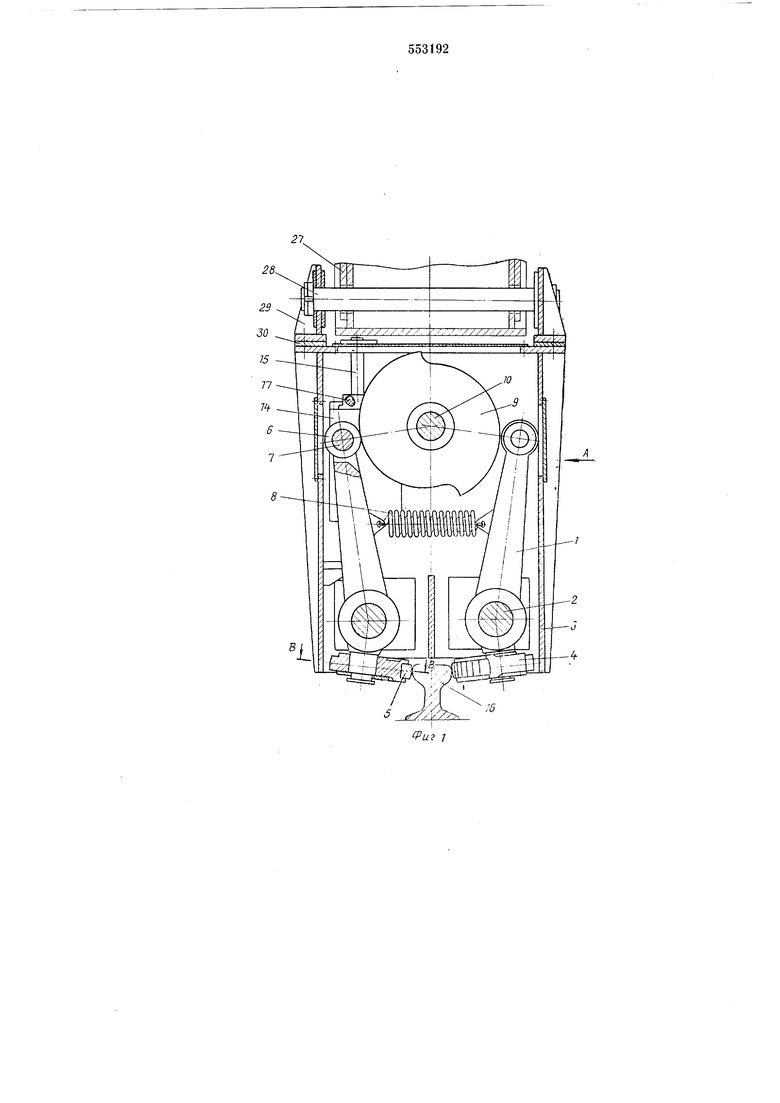
которые пере мещаются в вертикальной плоскости по направляющим 15. Назначение грузов 14 - подвод эксцентриков 4 к боковым поверхностям рельса 16 и создание предварительного усилия зажатия рельса 16, необходимого для поворота эксцентриков 4 нри угоне крана ветром. К верхней части грузов 14 прикреплены резиновые упоры 17. Вал соединяется с приводом через зубчатую передачу (колесо 18 и шестерню 19) посредством управляемой муфты 20. Привод состоит из электродвигателя 21, соединительной муфты 22 и редуктора 23. На другом конце вала 10 пасажены шайба 24 и тормозная муфта 25, вза-имодействуюш,ая с тормозом 26.
Захват подвепшвается к металлоконструкции крана 27 при помощи осей 28 и кронштейнов 29 через прокладки 30. На осях 2 с иомощью кронштейнов 31 и пружин 32 установлены направляющие катки 33.
При помощи пружин 34 фиксируется нормальное положение эксцентрцков 4 относительно рельса 18.
Захват работает следующим образом.
При обесточивании механизма передвижения крана и, соответственно, при обесточиваиии механизмов захвата колодки тормоза 26 расходятся, грузы 14, скользя вниз по направляющим 15, через зубчатую рейку 13 и шестерню 12 проворачивают вал 10 профилированного кулачка 9. При этом вал 10 отсоединен от привода при помощи управляелшй муфты 20. Кулачок 9, взаимодействуя с роликами 6, разводит верхние концы рычагов 1 и тем самым подводит эксцентрики 4 к боковым иоверхпостям рельса 16. При иовышенпых ветровых нагрузках эксцентрики проворачиваются на цапфах рычагов 1, заклинивая рельс 16.
После прекращения повышенных ветровых нагрузок и при необходимости включения механизма передвижения крана вначале включается электродвигатель 21 и муфта 20. Крутящий момент от электродвигателя 21 через соединительную муфту 22, редуктор 23, зубчатую передачу 19 и 18, муфту 20 передается на вал 10. Вместе с валом 10 проворачивается кулачок 9; верхние концы рычагов 1 под действием пружины в сводятся, и эксцентрики 5 4 отводятся от рельса 16. Пружины 34 выставляют эксцентрики 4 нормально относительно боковой поверхности рельса 16.
После отвода эксцентриков 4 от рельса 16, шайба 24 своими выступами воздействует вначале на выключатель 35, затем на выключатель 36. При этом выключатель 35 отключает электродвигатель 21 и управляемую муфту 20 и включает тормоз 26 - колодки тормоза сводятся, а грузы удерживаются в верхнем положении. После чего выключатель 36 включает механизм передвижения крана.
Формула изобретения
Автоматический противоугонный рельсовый захват, содержащий рычаги, закрепленные в средней части на неподвижных осях и связанные друг с другом пружиной, на верхних концах рычагов укреплены ролики, а на нижних - эксцентрики, ролики связаны с распорным элементо.м, который кинематически Соединен с приводом захвата и грузами, отличающийся тем, что, с целью повышения надежности его в работе путем предварительного зажатия рельса, он снабжен зубчатыми рейками, направляющими, управляемой муфтой и валом с зубчатыми щестернями, причем распорный элемент выполнен в виде профилированного кулачка, зубчатые рейки и направляющие расположены вертикально, а в нижней части зубчатых реек укреплены грузы, расположенные в направляющих, при этом профилированный кулачок жестко укреплен на валу и кинематически соединен с приводом через управляемую муфту, а зубчатые шестерни связаны с зубчатыми рейками.
Источники информации, принятые во внимание при экспертизе
1. Н. И. Ерофеев «Предохранительные и сигнализационные устройства кранов, Москва, Машгиз, 1960 г., фиг. 35, а.
28.
29 26
ВидА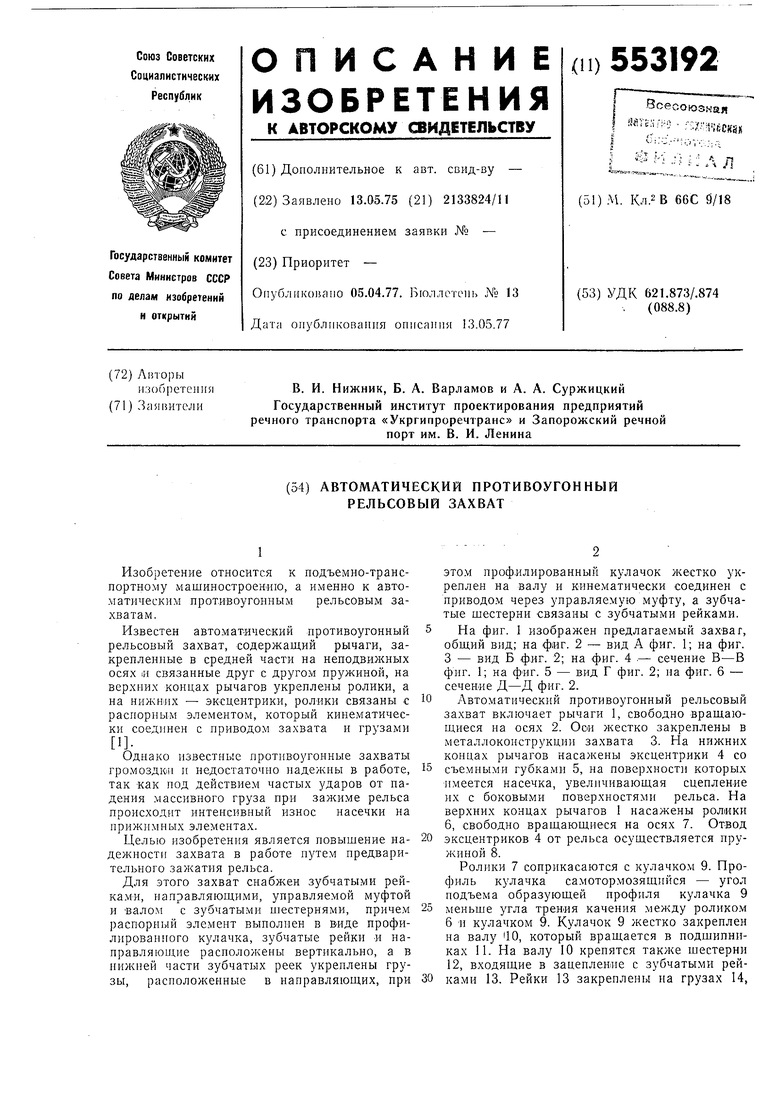

| название | год | авторы | номер документа |
|---|---|---|---|
| Противоугонный захват для кранов | 1972 |
|
SU446462A1 |
| Устройство для перемещения вагонеток | 1987 |
|
SU1442446A1 |
| Противоугонный рельсовый захват крана | 1990 |
|
SU1773850A1 |
| Противоугонный рельсовый захват крана | 1981 |
|
SU984979A1 |
| Машина для вязки жгутов электрических проводов | 1961 |
|
SU145444A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Автоматический противоугонный рельсовый захват | 1986 |
|
SU1384527A1 |
| Противоугонное устройство для передвижных кранов | 1951 |
|
SU95114A1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2011 |
|
RU2471701C1 |
| Устройство для загрузки комплекта шомполов с рыбой в клети для термической обработки | 1982 |
|
SU1099934A1 |


5
3 2
/-Г (fT//x
,---. гз
35 24
18
70
20
