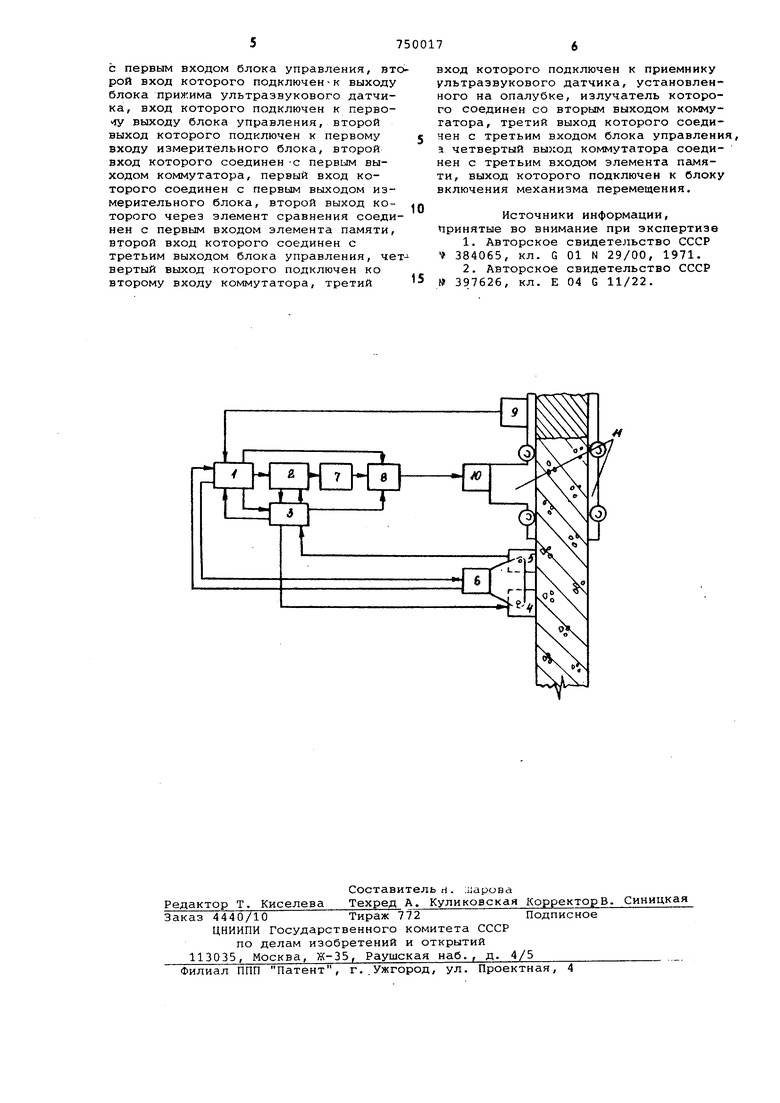
рительного блока, второй вход которого соединен с первым выходом коммутатора, первый вход которого соеди нен с первым выходом измерительного блока, второй выход которого через элемент сравнения соединен с первым входом элемента памяти, второй вход которого соединен с третьим вьиюдом блока управления, четвертый ко торого подключен ко второму входу ко мутатора, третий вход которого подключен к приемнику ультразвукового датчика, установленного на опалубке, излучатель которого соединен со вторым выходом коммутатора, третий выход которого соединен с третьим входом блока управления, а четвертый выход коммутатора соединен с третьим входом элемента памяти, выход которого подключен к блоку включения механизма перемещения. На чертеже схематически изображено предлагаемое устройство. Устройство содержит блок 1 управл ния, измерительный блок 2, коммутатор 3, ультразвуковой датчик, состоя щий из излучателя 4 и приемника 5, блок 6 прижима ультразвукового датчи ка, элемент 7 сравнения, элемент 8 памяти, блок 9 контроля уровня свеже уложенного бетона, блок 10 включения механизма 11 перемещения скользящей опалубки. Устройство для контроля и управле ния работой скользящей опалубки рабо тает следующим образом. После включения блока 1 управлени вырабатывается команда на включение измерительного блока 2 и по истечени установленного времени, предназначен ного для прогрева прибора, от блока управления поступают две команды.Пер вая команда на включение коммутатора 3, который подключает ультразвуковой датчик 4 к измерительному блоку 2 и первую ячейку элемента 8 памяти к его входу. Вторая команда включает блок прижима ультразвукового датчика. Пос ле прижима к бетону ультразвуковые им пульсы, излучаемые излучателем 4 проходят через бетон и, достигнув приемника 5, преобразуются им в сигнал, который через коммутатор 3 и измерительный блок 2 поступает в элемент 7 сравнения, где его сравнивают с этало ном, соответствующим сигналу, получен ному при прозву-чивании бетона с заранее заданным значением прочности бетона. При совпадении значений измеренного сигнала и эталона получают электрический импульс, который попав в первую ячейку элемента 8 памяти, переводит ее контакты из нормально разомкнутого состояния в замкнутое. Для более точного измерения в устройстве может быть применено п количество ультразвуковых датчиков. В этом случае блок 1 управления вырабатывает сигнал на отвод одного дат чика и на прижим к бетону второго ультразвукового датчика, (которые ран номерно расположены по периметру возводимого сооружения с соответствующим блоком прижима) , после чего процессы преобразования сигналов, команд и подключений блоков и ячеек повторяются аналогично вышеописанному для одного ультразвукового датчика. Закончив опрос последнего ультразвукового датчика блок 1 управления выдает команду, которая проходит через находящуюся внутри его блокировку и, пройдя через контакты ячеек элемента В памяти, образующие последовательную цепь, поступает на блок 10 включения механизма 11 перемещения скользящей опалубки. Блокировка блока управления открывается для прохождения команды только в случае заполнения скользящей опалубки свежеуложённьом бетоном на определенную высоту, о чем сигнализирует блок контроля уровня свежеуложенного бетона 9, а также при окончании отхода ультразвуковых датчиков от поверхности бетона, о чем сигнализирует соответствующий блок прижима соответствующего ультразвукового датчика. Контакты ячеек элемента памяти, каждые из которых соответствуют своему ультразвуковому датчику, замыкаются и образуют последовательную цепь только в случае достижения бетоном прочности, соответствующей заданной величине. Высота подъема (шаг перемещения) скользящей опалубки задается оператором в зависимости от технологических факторов (В/Ц, подвижности бетонной смеси и температурновлажностных условий). Таким образом, устройство для контроля и управления работой скользящей опалубки при возведении высотных монолитных железобетонных сооружений дает возможность автоматически обеспечивать оптимальную по технологическим условиям скорость перемещения скользящей опалубки при достижении ранее уложенным бетоном заданной прочности по всему периметру непосредственно в процессе возведения сооружения. Формула изобретения Устройство для управления работой скользящей опалубки, содержащее блок включения механизма перемещения, измерительный блок и ультразвуковой датчик, отличающееся тем, что, с целью повышения точности управления, оно снабжено блоком прижима ультразвукового датчика, блоком контроля уровня бетона, блоком управпения, элементом сравнения, элементом памяти и коммутатором, причем блок контроля уровня бетона соединен
с первым входом блока управления, второй вход которого подключен - к выходу блока прижима ультразвукового датчика, вход которого подключен к первочу выходу блока управления, второй выход которого подключен к первому входу измерительного блока, второй вход которого соединен С первым выходом коммутатора, первый вход которого соединен с первым выходом измерительного блока, второй выход которого через элемент сравнения соединен с первым входом элемента памяти, второй вход которого соединен с третьим выходом блока управления, четвертый выход которого подключен ко второму входу коммутатора, третий
вход которого подключен к приемнику ультразвукового датчика, установленного на опалубке, излучатель которого соединен со вторым выходом коммутатора, третий выход которого соединен с третьим входом блока управления, а четвертый вызсод коммутатора соединен с третьим входом элемента памяти, выход которого подключен к блоку включения механизма перемещения.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 384065, кл. G 01 N 29/00, 1971.
2.Авторское свидетельство СССР 397626, кл. Е 04 G 11/22.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ПОДВИЖНОЙ ОПАЛУБКИ | 2003 |
|
RU2250323C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КАЧЕСТВЕННЫХ ХАРАКТЕРИСТИК МАТЕРИАЛА | 1972 |
|
SU349940A1 |
| Устройство контроля скорости | 1983 |
|
SU1111190A1 |
| Устройство для считывания графической информации | 1979 |
|
SU881788A1 |
| СПОСОБ МОНИТОРИНГА ХАРАКТЕРИСТИК ОПТИЧЕСКИХ ВОЛОКОН ВОЛОКОННО-ОПТИЧЕСКИХ ЛИНИЙ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2822691C1 |
| Ультразвуковой дефектоскоп | 1985 |
|
SU1288586A1 |
| Устройство для управления процессом тепловой обработки бетона | 1980 |
|
SU903359A1 |
| Устройство для обнаружения поврежденного участка телеграфного тракта | 1981 |
|
SU1042194A2 |
| Устройство для измерения температуры | 1979 |
|
SU838425A1 |
| Способ компенсации погрешностей акустических локационных уровнемеров и устройство для его осуществления | 1985 |
|
SU1529047A1 |
