Изобретение относится к строительству, преимущественно к возведению монолитных железобетонных сооружений.
Известна опалубка для возведения многоэтажных монолитных зданий способом переопирания на вертикальные несущие конструкции, причем каждая последующая плита бетонируется на ранее сформированной плите. Опалубка для осуществления данного способа возведения включает домкратные рамы, оснащенные захватами, размещенными на нижних концах стоек для зацепления плит перекрытия, основные гидростойки, вмонтированные в ригели домкратных рам, предназначенные для перемещения опалубки на вышележащий ярус с синхронным подъемом плит перекрытия (см. Патент РФ N 2078884 E 04 G 11/20, 10.05.97 БИ N13 “Способ возведения монолитного здания и подвижная опалубка для ее осуществления”.
Однако при работе указанного устройства имеет место большое количество ручных операций, что снижает точность управления подвижной опалубкой и увеличивает трудоемкость процесса.
Наиболее близким по технической сущности и достигаемому эффекту является устройство для управления работой скользящей опалубки, содержащее блок включения механизма перемещения, измерительный блок, ультразвуковой датчик, блок прижима ультразвукового датчика, блок контроля уровня бетона, блок управления, элемент сравнения, элемент памяти и коммутатор (см. А.С. N 750017, E 04 G 11/22, опубл.23.07.80, БИ N27 “Устройство для управления работой скользящей опалубки”).
Однако указанное устройство не может быть эффективно применено для контроля и управления работой подвижной опалубки, так как в нем применен ультразвуковой датчик, а это приводит к ослаблению принимаемого ультразвукового сигнала, проходящего через четыре границы раздела сред с различными акустическими сопротивлениями (воздух - опалубочный щит, опалубочный щит - материал стены, материал стены - опалубочный щит, опалубочный щит - воздух), и к появлению дополнительной погрешности измерения, связанной с нестабильностью контактных условий на границе раздела стенка опалубки - материал стены, а при возникновении между стеной и опалубкой каверн и воздушных зазоров - к полному исключению возможности акустических измерений. Также данное устройство не может быть применено для управления механизированной объемно-переставной опалубкой в связи с различием в алгоритмах управления.
Цель изобретения - повышение точности управления подвижной опалубкой, снижение трудоемкости процесса возведения монолитных железобетонных зданий.
Поставленная цель достигается тем, что устройство для управления работой подвижной опалубки, содержащее блок механизма перемещения, измерительный блок и датчики технологических параметров бетонирования, дополнительно снабжено СВЧ-датчиками высоты подъема кружальной рамы, прочности бетона, позиционирования элементов подвижной опалубки, датчиками прижима и отвода опалубочных щитов, датчиком переопирания и блоком управления, работающим по заданной программе, при этом выходы датчиков высоты подъема кружальной рамы, прочности бетона, позиционирования элементов подвижной опалубки подключены к блоку управления через блок последовательного интерфейса, а датчики прижима, отвода опалубочных щитов и переопирания подключены к блоку управления через блок дискретных входов, а сигналы задания, формируемые блоком управления, поступают на входы электрогидроусилителей подъема, прижима, отвода опалубочных щитов и переопирания через блок последовательного интерфейса, а выходы электрогидроусилителей подъема, прижима, отвода опалубочных щитов и переопирания подключены к гидроцилиндрам подъема, прижима, отвода опалубочных щитов и переопирания, при этом СВЧ-датчики высоты подъема кружальной рамы, прочности бетона, позиционирования элементов подвижной опалубки выполнены в виде управляемого модулятором СВЧ-генератора электромагнитных колебаний, циркулятора, приемно-передающей рупорной антенны в датчике высоты подъема кружальной рамы и приемной и передающей антенн в датчиках прочности бетона и позиционирования элементов подвижной опалубки, и последовательно соединенных смесителя, усилителя и фильтра, при этом выход СВЧ-генератора подключен к первому входу циркулятора, ко второму входу которого подключена приемно-передающая рупорная антенна датчика высоты подъема кружальной рамы или передающая и приемная антенны датчиков прочности бетона и позиционирования элементов опалубочного комплекса, выход циркулятора подключен к смесителю, а выход фильтра является выходом сигнала датчика.
При проведении поиска по патентно-технической литературе не обнаружены устройства управления работой подвижной опалубки с аналогичным набором блоков. Следовательно, изобретение соответствует критерию “новизна”.
Набор предлагаемых блоков и их связей соответствует критерию “изобретательский уровень”.
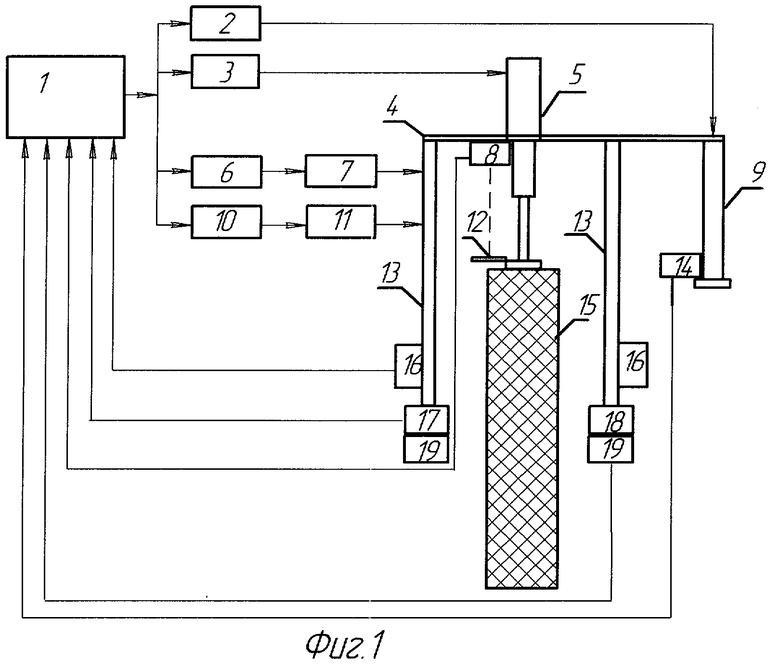
Изобретение поясняется следующими чертежами. На фиг.1 представлена функциональная схема устройства управления работой подвижной опалубки; на фиг.2 - функциональная схема блока управления; на фиг.3 - функциональная схема СВЧ-датчика высоты подъема кружальной рамы; на фиг.4 - СВЧ-датчиков прочности бетона и позиционирования элементов подвижной опалубки; на фиг.5 - блок схема алгоритма работы блока управления.
Устройство для контроля и управления работой подвижной опалубки содержит: блок управления 1, электрогидроусилитель переопирания 2, электрогидроусилитель подъема 3, гидроцилиндры подъема 5, электрогидроусилитель 6 прижима опалубочных щитов, гидроцилиндр 7 прижима опалубочных щитов, СВЧ-датчик 8 высоты подъема кружальной рамы, гидроцилиндр переопирания 9, электрогидроусилитель 10 отвода опалубочных щитов, гидроцилиндр 11 отвода опалубочных щитов, отражатель 12, датчик 14 переопирания, СВЧ-датчик 16 плотности бетона, датчик 17 прижима опалубочных щитов, датчик 18 отвода опалубочных щитов, СВЧ-датчики 19 позиционирования подвижной опалубки, (фиг.1).
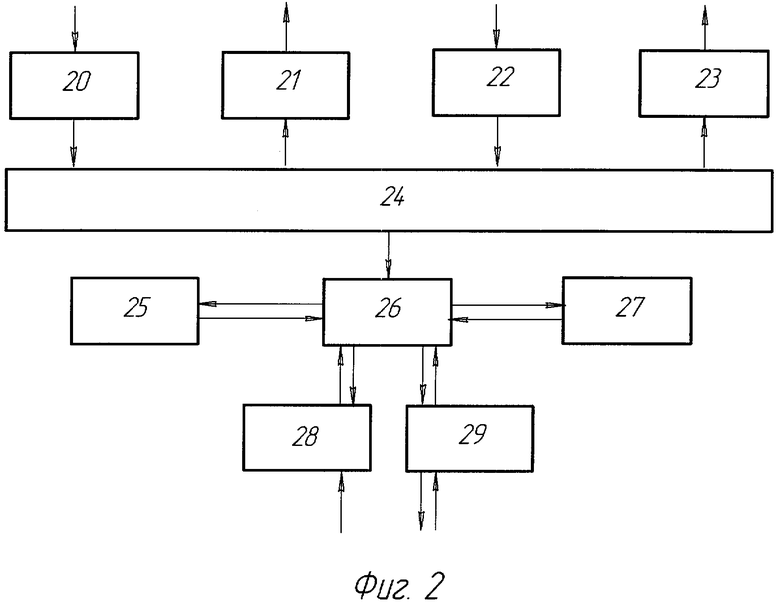
Блок управления представляет собой программируемый логический контроллер PCD1.M120, состоящий из блока АЦП 20, блока ЦАП 21, блока дискретных входов 22, блока дискретных выходов 23, шины данных и управления 24, блока таймера реального времени 25, центрального процессорного устройства 26, блока памяти 27, блока входа быстрых счетчиков и прерываний 28 и блока последовательного интерфейса 29, который представляет из себя двунаправленный порт. (фиг.2).
Блок последовательного интерфейса 29 подключен к входу электрогидроусилителей подъема 3, прижима и отвода опалубочных щитов 6 и 10, преопирания 2. На вход блока дискретных входов 22 подаются сигналы с датчиков прижима и отвода опалубочных щитов 17 и 18. Блок последовательного интерфейса 29 также соединен с выходами СВЧ-датчиков высоты подъема 8 кружальной рамы, прочности бетона 16 и позиционирования 19 подвижной опалубки. СВЧ-датчик высоты подъема 8 кружальной рамы крепится на кружальной раме 4 подвижной опалубки, а отражатель 12 на конце штока гидроцилиндра подъема 5. СВЧ-датчики 16 прочности бетона и позиционирования 19 элементов подвижной опалубки крепятся на щитах 13 подвижной опалубки.
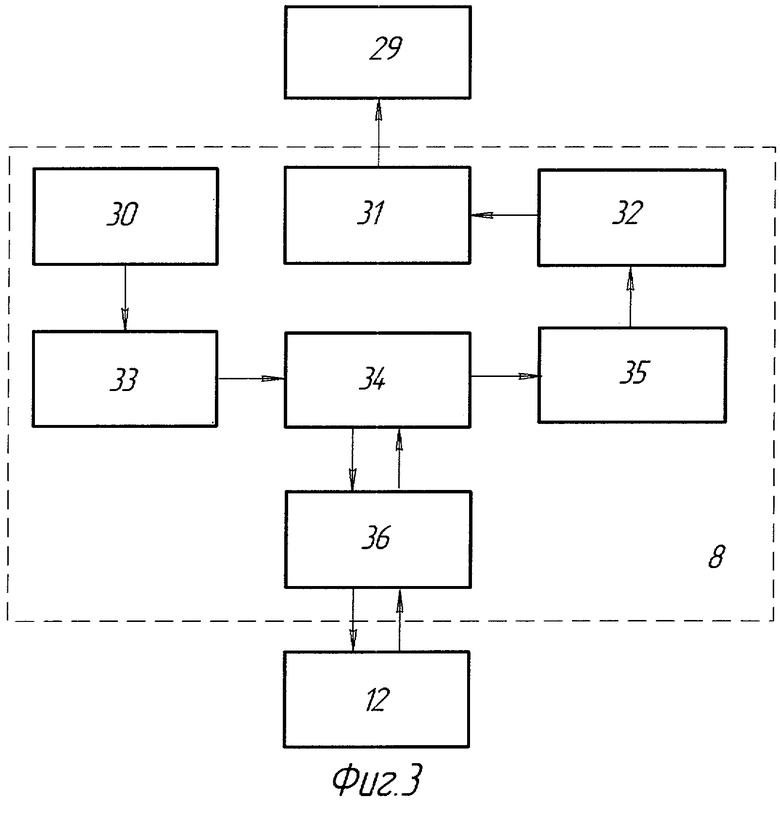
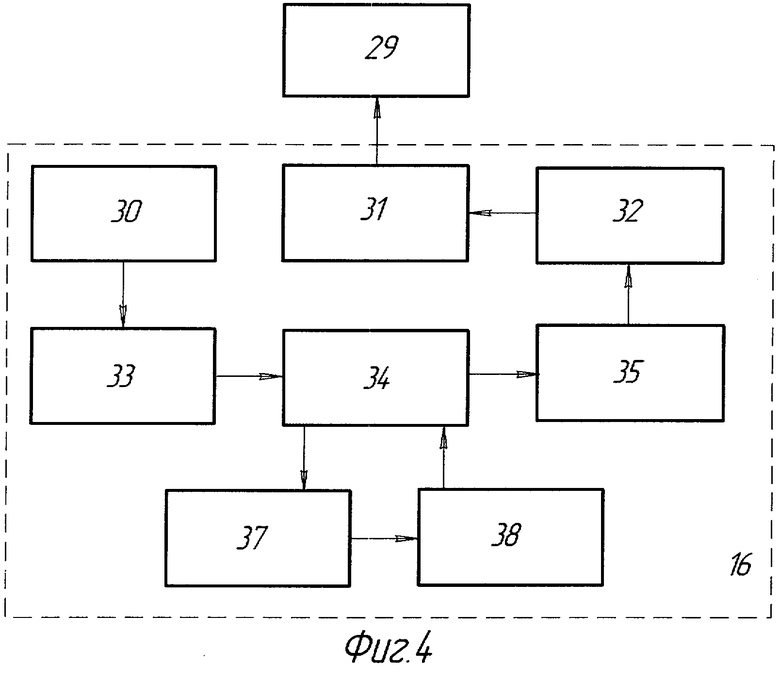
СВЧ-датчики высоты подъема кружальной рамы 8, прочности бетона 16 и позиционирования 19 элементов подвижной опалубки содержат: модулятор 30, фильтр 31, усилитель 32, СВЧ-генератор электромагнитных колебаний 33, циркулятор 34, смеситель 35, приемно-передающую антенну 36 в датчике высоты подъема кружальной рамы 8, либо приемную и передающую антенны 37, 38 в датчиках прочности бетона 16 и позиционирования 19 подвижной опалубки, (фиг 3,4)
Управляемый модулятором 30 СВЧ-генератор 33 подключен к первому входу циркулятора 34, к второму входу которого подключены либо приемно-передающая антенна 36 в датчике высоты подъема кружальной рамы 8, либо приемная и передающая антенны 37, 38 в датчике прочности бетона 16 и датчиках позиционирования 19 элементов подвижной опалубки, к выходу циркулятора 34 подключен вход смесителя 35, выход которого соединен с входом усилителя 32, выход которого подключен к входу фильтра 31, выход которого подключен к блоку последовательного интерфейса 29.
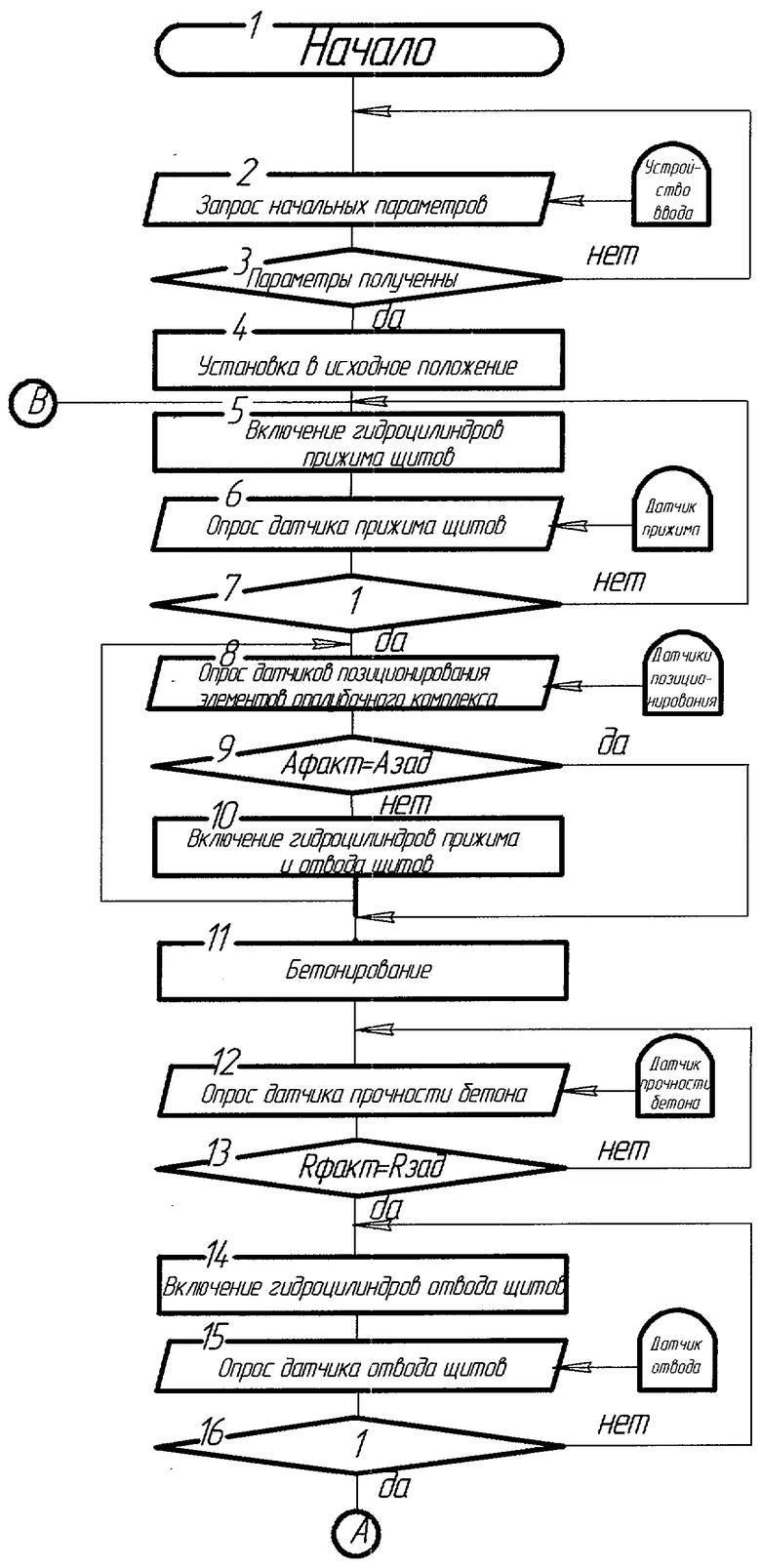
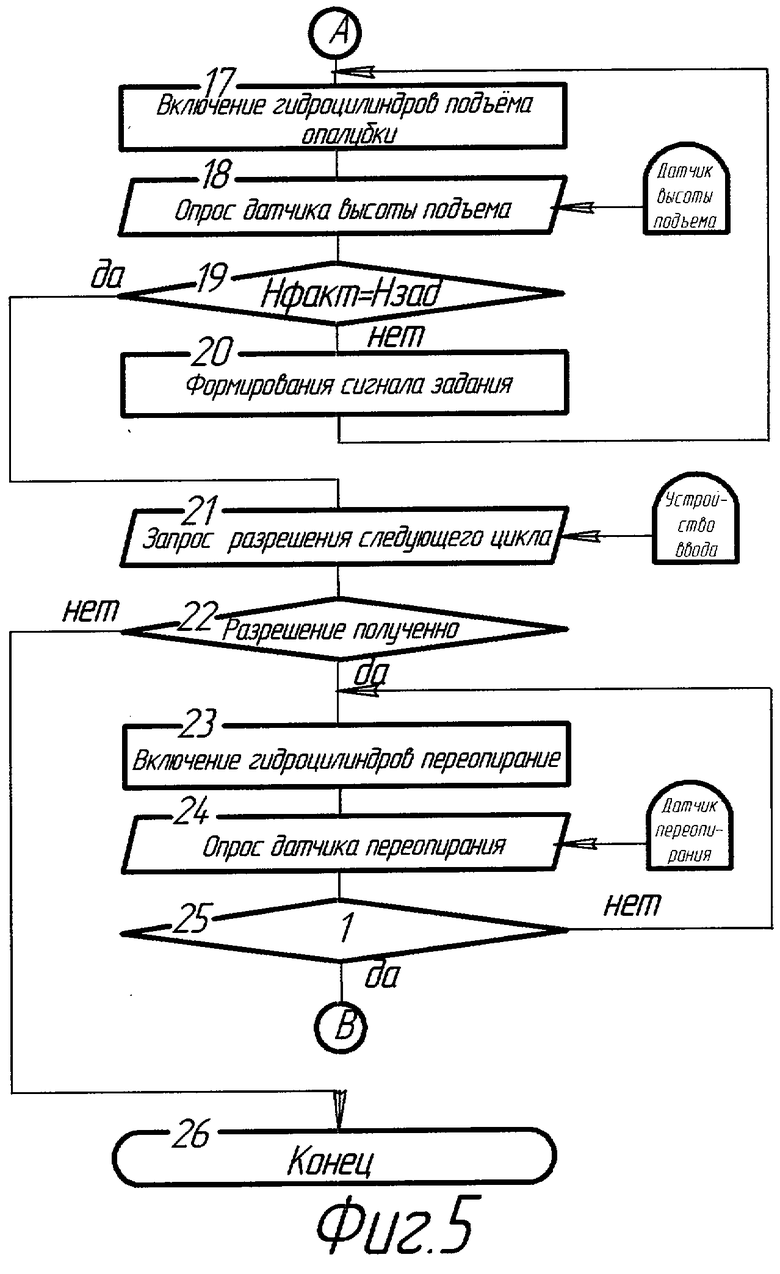
Устройство для контроля и управления работой подвижной опалубки работает следующим образом (фиг.5).
После включения блока управления 1 вырабатывается команда на включение СВЧ-датчиков высоты подъема кружальной рамы 8, прочности бетона 16, позиционирования 19 элементов подвижной опалубки, датчика прижима опалубочных щитов 17 и датчика отвода опалубочных щитов 18. Блок управления 1 осуществляет запрос начальных параметров технологического процесса бетонирования монолитного здания (количество этажей здания, высота этажа здания, толщина стены, конечный уровень прочности бетона и другие).
При отсутствии ввода таких параметров запрос повторяется. После ввода начальных параметров блок осуществляет установку опалубки в исходное положение (данное положение исходно только для нижеследующего примера, процесс может начинаться из любого начального положения). С блока последовательного интерфейса 29 блока управления 1 поступает сигнал на вход электрогидроусилителя 6 прижима щитов.
Электрогидроусилитель 6, в зависимости от величины сигнала, поступающего на его вход, формирует разность давлений в рабочих полостях гидроцилиндра прижима 7, который является исполнительным механизмом, в результате разницы давлений осуществляется перемещение штока гидроцилиндра 7 и происходит прижим опалубочных щитов 13. Окончание прижима опалубочных щитов при этом контролируется датчиком прижима 17, выходной сигнал которого поступает на блок дискретных входов 22 блока управления 1.
При поступлении сигнала от датчика прижима 17 на блок дискретных входов 22 блока управления 1 последний дает команду на выполнение процесса позиционирования опалубочных щитов 13.
В ходе позиционирования опалубочных щитов сигнал с СВЧ-датчиков позиционирования 19 элементов подвижной опалубки поступает на последовательный интерфейс 29 блока управления 1, который сравнивает фактическое положение Афакт опалубочных щитов 13 с заданным положением Азад. В зависимости от величины рассогласования Афакт и Азад блок управления 1 формирует сигнал задания, который через блок последовательного интерфейса 29 поступает на электрогидроусилители 6 и 10 прижима и отвода опалубочных щитов. В зависимости от величины сигнала задания, поступающего на электрогидроусилители 6 и 10, формируется разность давлений в рабочих полостях гидроцилиндров прижима 7 и отвода 11 опалубочных щитов, и как следствие разницы давлений осуществляется перемещение штоков гидроцилиндров 7 и 11, в результате чего происходит позиционирование опалубочных щитов 13. Процесс позиционирования заканчивается при условии Афакт=Азад, после чего блок управления 1 дает команду на выполнение процесса бетонирования (здесь не рассматривается).
В процессе набора бетоном требуемой прочности сигнал с датчика 16 прочности бетона Rфакт поступает на блок последовательного интерфейса 29 блока управления 1, который сравнивает поступающий сигнал с требуемой прочностью бетона Rзад, время начала подъема подвижной опалубки определяется как выполнение условия Rфакт=Rзад.
Перед процессом подъема с блока последовательного интерфейса 29 блока управления 1 поступает сигнал на вход электрогидроусилителя отвода опалубочных щитов 10, который в зависимости от величины сигнала, поступающего на его вход, формирует разность давлений в рабочих полостях гидроцилиндра отвода 11, который является исполнительным механизмом. В результате разницы давлений осуществляется перемещение штока гидроцилиндра 11 и происходит отвод опалубочных щитов, который при этом контролируется датчиком отвода 18, выходной сигнал с которого поступает на блок дискретных входов 22 блока управления 1.
При поступлении сигнала от датчика отвода 18 на блок дискретных входов 22 блока управления 1 начинается процесс подъема опалубки.
При подъеме сигнал с датчика высоты подъема кружальной рамы 8 поступает на блок последовательного интерфейса 29 блока управления 1, в зависимости от величины выходного сигнала Нфакт датчика высоты кружальной рамы 8 блок управления 1 формирует оптимальный сигнал задания на вертикальное перемещение подвижной опалубки. Величина сигнала задания на вертикальное перемещение подвижной опалубки определяется текущим значением Нфакт высоты подъема подвижной опалубки. Сигнал задания для подъема опалубки с блока последовательного интерфейса 29 блока управления 1 поступает на вход электрогидроусилителя 3, который в зависимости от величины сигнала, поступающего на его вход, формирует разность давлений в рабочих полостях гидроцилиндра 5, который является исполнительным механизмом, в результате разницы давлений осуществляется перемещение штока гидроцилиндра 5 и происходит подъем подвижной опалубки. Процесс подъема завершается, когда сигнал с датчика высоты подъема кружальной рамы Нфакт становится равен заданной высоте подъема кружальной рамы Нзад.
После окончания процесса подъема блок управления 1 запрашивает у оператора разрешение на следующий цикл работы, при получении разрешения с блока последовательного интерфейса 29 блока управления 1 поступает сигнал на вход электрогидроусилителя переопирания 2. Электрогидроусилитель 2 в зависимости от величины сигнала, поступающего на его вход, формирует разность давлений в рабочих полостях гидроцилиндра переопирания 9, который является исполнительным механизмом, в результате разницы давлений происходит перемещение штока гидроцилиндра 9 и происходит переопирание на перекрытие. Завершение переопирания на перекрытие при этом контролируется датчиком 14, выходной сигнал с которого поступает на блок дискретных входов 22 блока управления 1. После чего вышеописанный процесс повторяется.
При отсутствии разрешения оператора на следующий цикл бетонирования процесс завершается.
По сравнению с прототипом предлагаемая конструкция позволяет обеспечить большую точность управления и снижение трудоемкости процесса возведения монолитных железобетонных зданий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОЗВЕДЕНИЯ МОНОЛИТНОГО ЗДАНИЯ И ПОДВИЖНАЯ ОПАЛУБКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2078884C1 |
| Подвижная опалубка | 1990 |
|
SU1767130A1 |
| Способ возведения монолитного здания | 1989 |
|
SU1740591A1 |
| Подвижная опалубка | 1985 |
|
SU1260487A1 |
| Опалубка для бетонирования наклонных граней гидротехнических сооружений | 1980 |
|
SU937677A1 |
| Опалубка для бетонирования наклонных и криволинейных граней гидротехнических сооружений | 1980 |
|
SU903535A1 |
| Подвижная опалубка для возведения монолитных железобетонных сооружений | 1979 |
|
SU789654A1 |
| Подвижная опалубка | 1990 |
|
SU1813156A3 |
| ПОДВИЖНАЯ ОПАЛУБКА С МЕХАНИЗИРОВАННЫМ КОМПЛЕКСОМ ДЛЯ ВОЗВЕДЕНИЯ МЕЖДУЭТАЖНЫХ ПЕРЕКРЫТИЙ | 2004 |
|
RU2276244C2 |
| Подвижная опалубка для возведения монолитных железобетонных сооружений | 1983 |
|
SU1108180A1 |
Изобретение относится к строительству и может быть использовано для управления работой подвижной опалубки при возведении монолитных железобетонных сооружений. Устройство содержит блок включения механизма перемещения, измерительный блок и датчики технологических параметров бетонирования, СВЧ-датчики высоты подъема кружальной рамы, прочности бетона, позиционирования элементов подвижной опалубки, датчик прижима и отвода опалубочных щитов, датчик переопирания и блок управления, работающий по заданной программе. Выходы первых трех датчиков подключены к блоку управления через блок последовательного интерфейса. Датчики прижима, отвода опалубочных щитов и переопирания подключены к блоку управления через блок дискретных входов. Сигналы управления, формируемые блоком управления, поступают на входы электрогидроусилителей подъема, прижима, отвода опалубочных щитов и переопирания через блок последовательного интерфейса. Выходы электрогидроусилителей подъема, прижима, отвода опалубочных щитов и переопирания подключены к гидроцилиндрам подъема, прижима, отвода опалубочных щитов и переопирания. Датчики высоты подъема кружальной рамы, прочности бетона, позиционирования элементов подвижной опалубки могут быть выполнены в виде управляемого модулятором СВЧ-генератора электромагнитных колебаний, циркулятора, приемно-передающей рупорной антенны в датчике высоты подъема кружальной рамы и приемной и передающей антенн в датчиках прочности бетона и позиционирования элементов подвижной опалубки, и последовательно соединенных смесителя, усилителя и фильтра. Выход СВЧ-генератора подключен к первому входу циркулятора, ко второму входу которого подключена приемно-передающая рупорная антенна датчика высоты подъема кружальной рамы или передающая и приемная антенны датчиков прочности бетона и позиционирования элементов подвижной опалубки. Выход циркулятора подключен к смесителю, а выход фильтра является выходом сигнала датчика. Изобретение позволяет повысить точность управления работой подвижной опалубки. 1 з.п. ф-лы, 5 ил.
| Устройство для управления работой скользящей опалубки | 1978 |
|
SU750017A1 |
| В ПТБ | 0 |
|
SU397626A1 |
| Устройство автоматического управления приводами скользящей опалубки | 1973 |
|
SU544739A1 |
| Система для автоматического управления скользящей опалубкой | 1976 |
|
SU585263A1 |
| Устройство автоматизации подъема опалубки | 1980 |
|
SU960406A1 |
| Устройство контроля к установкедля РЕгулиРОВАНия пОлОжЕНия СКОльзя-щЕй ОпАлубКи | 1979 |
|
SU815231A1 |
| Устройство для автоматического подъема и контроля положения скользящей опалубки | 1978 |
|
SU687215A1 |
| Устройство для автоматического контроля положения опалубок | 1976 |
|
SU642453A1 |
| СПОСОБ ВОЗВЕДЕНИЯ МОНОЛИТНОГО ЗДАНИЯ И ПОДВИЖНАЯ ОПАЛУБКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2078884C1 |

