(54) ГИБРИДНАЯ ОПОРА СКОЛЬЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиальная опора скольжения | 1975 |
|
SU554427A1 |
| ГАЗОВАЯ ОПОРА | 2007 |
|
RU2408802C2 |
| ГАЗОВАЯ ОПОРА | 2001 |
|
RU2224919C2 |
| ОПОРНЫЙ УЗЕЛ ПОГРУЖНОЙ ОДНОВИНТОВОЙ НАСОСНОЙ УСТАНОВКИ | 2008 |
|
RU2375604C1 |
| Комбинированный радиальный подшипник с широким диапазоном рабочих скоростей и нагрузок (варианты) | 2016 |
|
RU2649280C1 |
| КОМБИНИРОВАННАЯ ОПОРА | 2007 |
|
RU2332594C1 |
| РАДИАЛЬНЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ | 2017 |
|
RU2651961C1 |
| ВЫСОКОСКОРОСТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1967 |
|
SU200650A1 |
| Динамометрическая шпиндельная опора | 1991 |
|
SU1803272A1 |
| ПОДШИПНИК СКОЛЬЖЕНИЯ | 1993 |
|
RU2086816C1 |
1
Изобретение относится к области машиностроения и может быть использовано в опорах скольжения различных машин и приборов.
Известна гибридная опора скольжения содержащая подвижный элемент и неподвижный элемент со смонтированной на нем упругой втулкой, устройство для деформации упругой втулки в радиальном направлении, выполненное в виде зафиксированных.. в окружном и осевом направлениях пружин, равномерно расположенных по окружности и смонтированных в сегментных пазах неподвижного элемента, один из концов которого размещен в глухих в радиальном ,5 направлении канавках на внутренней поверхности упругой втулки, устройство для регулирования вел1тчины радиального зазора, имеющее регулировочный винт, элементы для предотвращения проворота упругой 20 втулки в окружном направлении относительно неподвижного элемента и сист« 1у подвода смазки в рабочий зазор, при этом подвижный элемент вытхэлнен в виде вращающейся обоймы, а неподв1гжный элемент выполнен в виде оси с центральным от верстием 1 .
При этом устройство для деформации упругой втулки в радиальном направлении выполнено в виде арочных плоских пружин, а устройство для регулирования величины радиального зазора выполнено в виде рерулировочного винта, смонтированного со стороны торца, и клина, взаимодействующего в осевом направлении клиновыми поверхностями с концами соседних арочных пружин и имеющего уступ, взаимодействующий с регулировочным винтом.
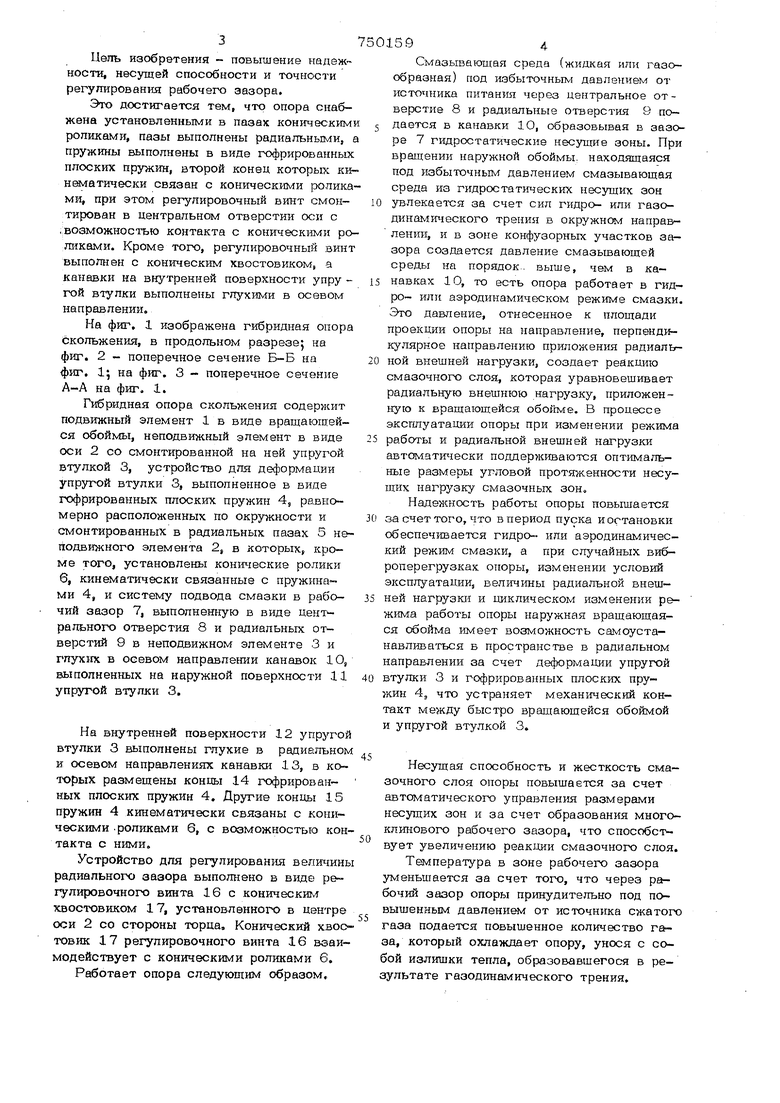
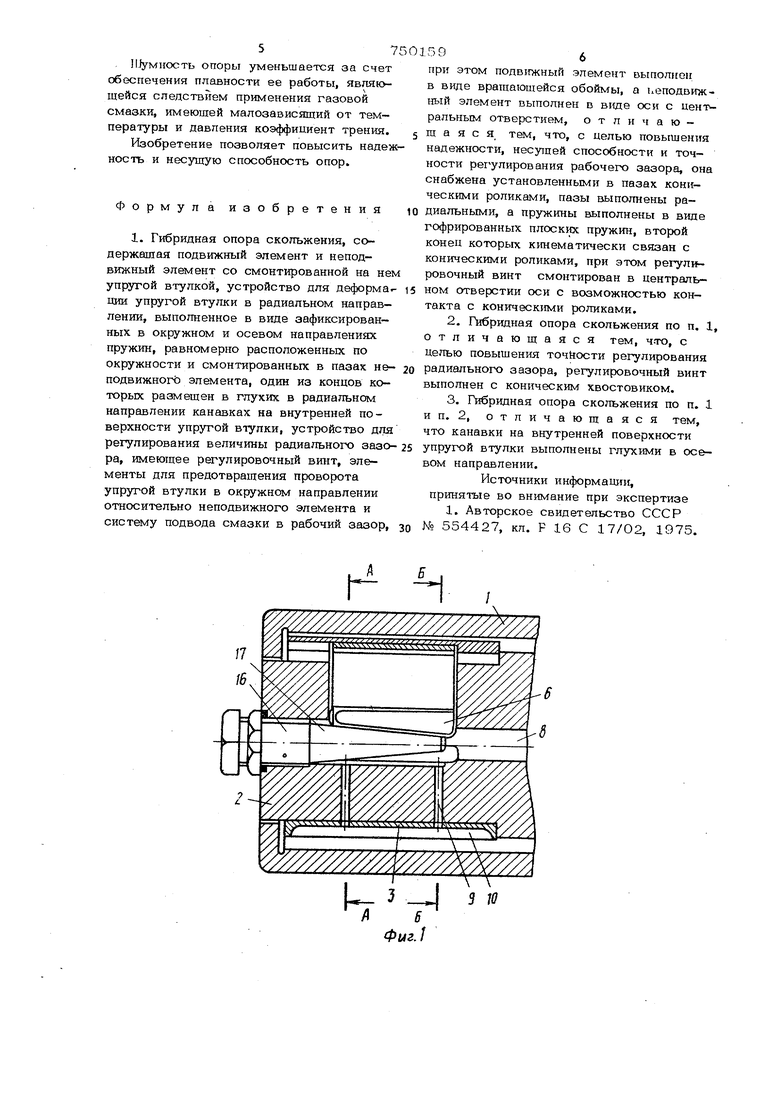
Однако известная гибридная опора скольжения обладает недостаточными точностью, несущей способностью и технологичностью, так как наличие в системе регулирования зазором клиньев требует значительных затрат при их изготовлении и, кроме того, применение их в опорах малых габаритов не представляется возможным. Цель изобретения - повышение надеж нести, несущей способности и точности регут-грования рабочего зазора. Это достигается тем, что опора снабжена установленными в пазах коническим роликами, пазы выполнены радиальными, пружины выполнены в виде гофрированных плоских пружин, второй конец которых ки нетлатически связан с коническ1Пу1и |эолика МН, при этом регулировочный винт СМОНтирован в центральном отверстии ос;и с ,;возможностью контакта с коническими ро . Кроме того, регулировочный винт выполнен с коническим хвостовиком, а канавки на внутренней поверхности упру гой втулки выполнены глухими в осевом направлении. На фиг. 1 изображена гибридная опора скольжения, в продольном разрезе; на фиг. 2 - поперечное сечение Б-Б на фиг. 1; на фиг. 3 -- поперечное сечение А-А на фиг. 1. Гибридная опора скольжения содержит подвижный элемент 1 в виде вращающейся обоймы, неподвин ный элемент в виде оси 2 со смонтированной на ней упругой втулкой 3, устройство для деформации упругой втулки 3, выполненное в виде гофрированных плоских пружин 4, равномерно расположенных по окружности и смонтированных в радиальных пазак 5 неЛодвижного элемента 2, в которых, кроме того, установлены конические ролики 6, кинематически связанные с пружинами 4, и систему подвода смазки в рабочий зазор 7, выполнешгую в виде цeнт рапьного отверстия 8 и радиальных отверстий 9 в неподвижном элементе 3 и гпухих в осевом направлении канавок 1О, выполненных на наружной поверхности 11 упругой втулки 3. На внутренней поверхности 12 упругой втулки 3 выполнены глухие в радиал1,ном и осевом направлениях канавки 13, в ко торых размещены концы 14 гофрированных плоских пружин 4. Другие концы 15 пружин 4 кинематически связаны с коническими .роликами 6, с возможностью кон такта с ними. Устройство для регулирования величин радиального зазора выполнено в виде регулировочного винта 16 с коническим хвостовиком 17, установленного в центре оси 2 со стороны торца. Конический хвос товик 17 регулировочного винта 16 взаимодействует с коническими роликами 6. Работает опора следующим образом. 594 Смазывающая среда (жидкая или газообразная) под избыточны давлением от источника питания через центральное отверстие 8 и радиальные отверстия 9 по- дается в канавки 1О, образовывая в зазоре 7 гидростатические несущие зоны. При вршдении наружной обоймы находящаяся под избыточным давлением смазывающая среда из гидростатических несущих зон увлекается за счет сил гидро- или газодинa.ичecкoгo трения в окружнс Г направлении, и в зоне конфузорных участков зазора создается давление смазьшающей среды на порядок, выше, чем в канавках 10, то есть опора работает в гидро- или аэродинамическом режиме смазки. Это давление, отнесенное к площади проекции опоры на направление, перпендикулярное направлению приложения радиальной внешней нагрузки, создает реакцию смазочного слоя, которая уравновешивает радиальную внешнюю нагрузку, приложенную к вращающейся обойме. В процессе эксплуатации опоры при изменении режима работы и радиальной внешней нагрузки автоматически поддерживаются оптимальные размеры угловой протяженности несущих нагрузку смазочных зон. Надежность работы опоры повышается за счет того, что в период пуска иостановки обеспечивается гидро- или аэродинамический режим смазки, а при случайных виброперегрузках опоры, изменении условий эксплуатации, величины радиальной внешней нагрузки и циклическом изменении режима работы опоры наружная вращаюш:аяся обойма имеет возможность самоуста- навливаться в пространстве в радиальном направлении за счет деформации упругой втулки 3 и гофрированных плоских пружин 4, что устраняет механический контакт между быстро вращающейся обоймой и упругой втулкой 3. Несущая способность и жесткость смазочного слоя опоры повышается за счет автоматического управления размерами несущих зон и за счет образования многоклинового рабочего зазора, что способствует увеличению реакции смазочного слоя. Температура в зоне рабочего зазора уменьшается за счет того, что через рабочий зазор оноры принудительно под повышенным давлением от источника сжатого газа подается повышенное количество газа, который охлаждает опору, унося с собой излишки тепла, образовавшегося в результате газодинамического трения. 57 Шумиость опоры уменьшается за счет обеспечения плавности ее работы, являющейся следствием применения газовой смазки, имеющей малозависящий от температуры и давления коэффициент трения. Изобретение позволяет повысить надеж ность и несущую способность опор. Формула изобретения 1. Гибридная опора скольжения, содержащая подвижный элемент и неподвижный элемент со смонтированной на не упругой втулкой, устройство для деформа ции упругой втулки в радиальном направлении, выполненное в виде зафиксированных в окружном и осевом направлениях пружин, равномерно расположенных по окружности и смонтированных в пазах не подвижногЬ элемента, один из концов которых размещен в глухих в радиальном направлении канавках на внутренней поверхности упругой втулки, устройство для регулирования величины радиального зазо ра, имеющее регулировочный вшгт, элементы для предотвращения проворота упругой втулки в окружном направлении относительно неподвижного элемента и систему подвода смазки в рабочий зазор
/7
LJ LJ
г -1
10 596 при этом ПОДВ1ГЖНЫЙ элемент выполнен в виде вращающейся обоймы, а кеподвижный элемент выполнен в виде оси с цент ральным отверстием, отличающаяся там, что, с целью повышения надежности, несущей способности и точности регулирования рабочего зазора, она снабжена установленными в пазах коническими роликами, пазы выполнены радиальными, а пружины выполнены в виде гофрированных плоских пружин, второй конец которых кинематически связан с коническими роликами, при этом регули ровочный винт смонтирован в центральном отверстии оси с возможностью контакта с коническими роликами. 2,Гибридная опора скольжения по п. 1, отличающаяся тем, что, с целью повышения точности регулирования радиального зазора, регулировочный винт выполнен с коническим хвостовиком. 3.Гибридная опора скольжения по п. 1 и п. 2, отличающаяся тем, что канавки на внутренней поверхности упругой втулки выполнены глухими в осевом направлении. Источники информащти, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 554427, кл. F 16 С 17/02, 1975.
г
15
/7 ;;
fi-5
/J
/3
/
