Предметом изобретения является электропривод для получения кругового или эллиптического движения рабочего органа без вращения его вокруг собственной оси, состоящий из нескольких электромагнитов для приведения я-коря в возвратно-посаупательное движение, питаемых от сети одно- «ли . многофазного тока, и из системы .пружин, связанных с рабочим органом.
Отличительной особенностью данного электропривода является настройка разных групп пружин на различные резонансные частоты, с целью получения сдвига фаз поступательных движений якорей.
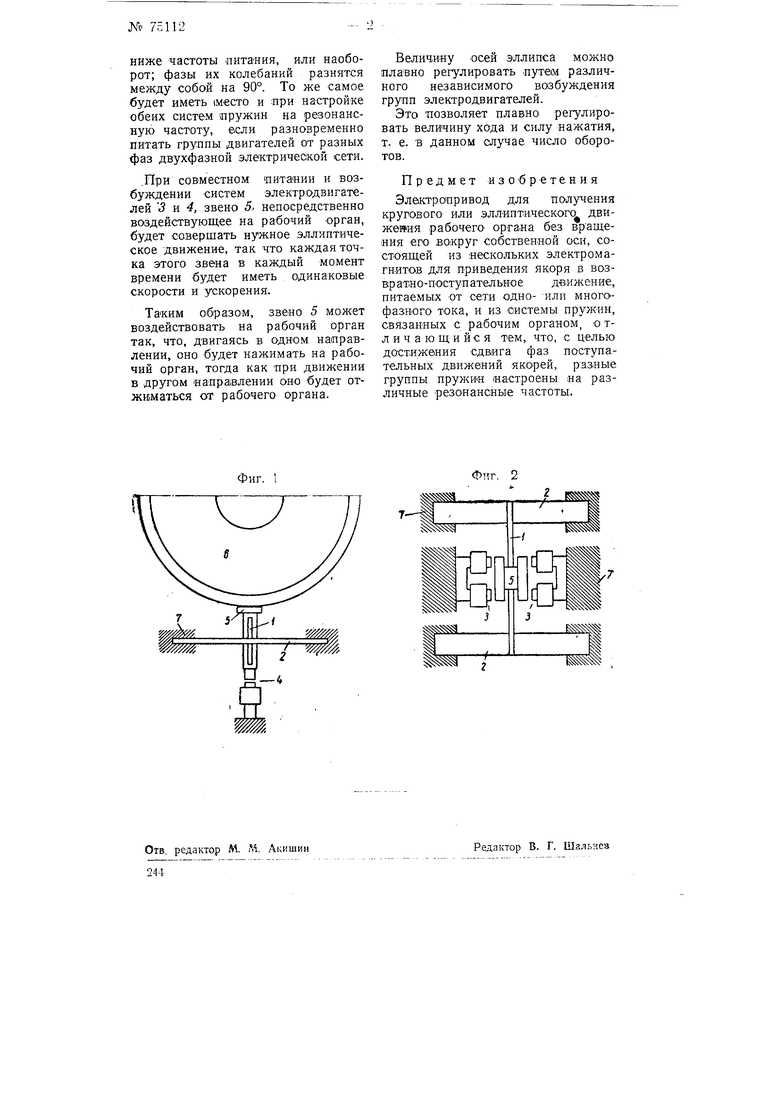
Предлагаемый электропривод изображен на фиг. 1 и 2 в двух проекциях со следующими обозначениями: /-упругая система пружин для ЭДНОЙ из осей эллиптического движения, 2- упругая система пружин для другой оси эллиптического движения, 3-группа электромагнитных двигателей с возвратно-поступательным движением, воздействующая на первую ось эллипса, 4-группа электромагнитных двигателей с возвратно-поступательным движением, воздействующая на вторую ось эллипса, 5-звено, неносредственно .воздействующее на рабочий орган, 6- рабочий орган, вращающийся вокрз г
неподвижной оси (щкив, маховик или барабан), 7-стационарная система крепления электропривода.
При выборе упругой с 1стемь пружин 1 необходимо, чтобы она могла прогибаться са1мостоятельно только в направлении своего наименьшего момента инерции, т. е. в направлении одной оси эллипса. В направлении же другой ОСИ система иружин , поставленная на ребро, самостоятельно прогибаться не может. Система пружин 1 опирается на систему пружин 2, которая закреплена в этом же направленииСистема пружин 2 может сама двигаться в направлении второй оси эллипса, так как в это.м направлении она имеет наименьший момент инерции, а в другом направлении двигаться не (Может, так «ак имеет весь.ма значительный момент инерции и, кроме того, своими концами заложена в гнезде стационарной системы 7.
Если дать питание и возбуждение только системе электромагнитных двигателей 3 или 4, то система пружин / или 2 придет в колебание в направлении первой (или второй) оси эллипса по прямолинейным траекториям.
Собственную частоту системы лружни / выбирают выше, а системна 2
ниже частоты питания, или наоборот; фазы их колебаний разнятся между собой на 90°. То же самое будет иметь (место и яри настройке обеих систем яружин на резонансную частоту, если разновременно питать группы двигателей от разных фаз двухфазной электрической сети.
.При совместном питании и возбуждении систем электродвигателей 3 н 4, звено 5, непосредственно воздействующее на рабочий орган, будет совершать нужное эллиптическое движение, так что каждая точка этого звена в каждый момент времени будет иметь одинаковые скорости и ускорения.
Таким образом, звено 5 может воздействовать на рабочий орган так, что, двигаясь в одном направлении, оно будет нажимать на рабочий орган, тогда как при движении в другом направлении оно будет отжиматься от рабочего органа.
Величину осей эллипса можно плавно регулировать путем различного независимого возбуждения групп электродвигателей.
Это позволяет плавно регулировать величину хода и силу нажатия, т. е. в данном случае число оборотов.
Предмет изобретения
Электропривод для получения кругового или эллиптического движеиия рабочего- органа без вращения его вокруг собственной оси, состоящей из нескольких электромагнитов для прнведения якоря в возвратно-поступательное движение, питаемых от сети одно- или многофазного тока, и из системы пруж-ин, связанных с рабочим органом, о тличающийся тем, что, с целью достижения сдвига фаз поступательных движений якорей, разные группы пружин настроены на различные резонансные частоты.
Фиг. 1
Фиг. 2
